В области измерительной техники известны индуктивные системы для отсчета и измерения линейных перемещений рабочих органов станков, содержащие основной и вспомогательный винт-якорь и гайку-датчик, укрепленную на подвижном органе станка.
Предложенная система отличается от известных тем, что в ней вспомогательный винтякорь, поворачивающийся в пределах одного оборота и выполненный в виде индуктивного датчика линейных перемещений, жестко связан с основным винтом-рейкой и шаг его нарезки соответствует шагу нарезки основного винта-рейки.
Это позволяет повысить точность установки координат.
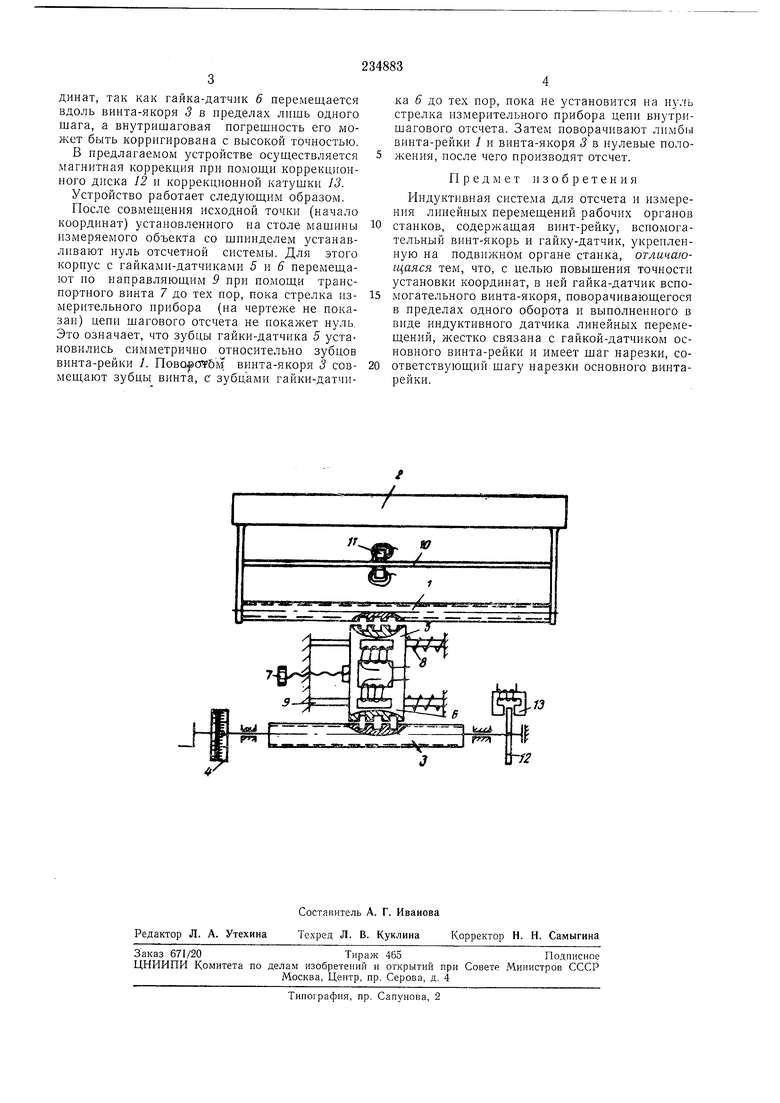
Па чертеже дана принципиальная схема описываемой системы.
В этой системе отсчет перемещений на целые шаги и на доли шага производится двумя отдельными устройствами.
Отсчет целых шагов производится при помощи винта-рейки 1, жестко связанного с подвижной частью станка 2 (стол или салазки), а отсчет долей шага - при помощи вспомогательного винта-якоря 3. Последний установлен на неподвижной части станка и может поворачиваться в пределах одного оборота с отсчетом по лимбу 4, причем шаг нарезки винта-якоря 3 соответствует шагу винта-рейки /.
Таким образом, винт-якорь 3 является как бы эталоноь для измерения долей шага, использование одного эталона для всей длины винта-рейки позволяет учесть влияние погрешности эталона на погрешность всей системы и устранить это влияние путем коррекции погрешности винта-якоря. Причем выполняется коррекция как накопленной, так и внутришаговой погрешности.
Гайка-датчик 5 винта-рейки и гайка-датчит 6 винта-якоря 3 жестко связаны между собой и могут вместе перемещаться в осевом направлении относительно винта-рейки 1 и винта-якоря 3 при помощи транспортного винта 7
и 8 по своим направляющим 9. Этим достигается преселектпвный набор координат как целых шагов, так и долей шага.
Корригирование накопленной погрешности шага винта-рейки / производится весьма точно известными механическими либо электрическими способами.
В частности, в схеме применен способ магнитной коррекции с помощью коррекционной линейки 10 и коррекционной катушки //.
Внутришаговая погрешность винта-рейки / не влияет на точность отсчета, так как винт не вращается, а используется как обычная рейкаякорь индуктивной системы.
динат, так как гайка-датчик 6 перемещается вдоль винта-якоря 3 в иределах лишь одного шага, а внутришаговая погрешность его может быть корригирована с высокой точностью.
В предлагаемом устройстве осундествляется магнитная коррекция при помощи коррекционного диска 12 и коррекционной катушки 13.
Устройство работает следующим образом.
После совмещения исходной точки (начало координат) установленного на столе машины измеряемого объекта со шпииделем устанавливают нуль отсчетной системы. Для этого корпус с гайками-датчиками 5 i 6 перемещают по направляющим 9 при помощи транспортного винта 7 до тех пор, пока стрелка измерительного прибора (на чертенке не показаи) цепн шагового отсчета не покажет нуль. Это означает, что зубцы гайки-датчика 5 установились симметрично относительно зубцов винта-рейки 1. Поворотим винта-якоря 3 совмещают зубцы винта, с зубцами гайки-датчика 6 до тех пор, пока не установится на нуль стрелка измерительного прибора цепи внутришагового отсчета. Затем поворачивают лимбы винта-рейки 1 и винта-якоря 3 в нулевые положения, после чего производят отсчет.
Предмет изобретения
Индуктивная система для отсчета и измерения линейных перемещений рабочих органов станков, содержащая винт-рейку, всиомогательный винт-якорь и гайку-датчик, укрепленную на подвижном органе станка, отличающаяся тем, что, с целью повышения точности установки координат, в ней гайка-датчик вспомогательного винта-якоря, поворачивающегося в пределах одного оборота и выполненного в виде индуктивного датчика линейных перемещений, жестко связана с гайкой-датчиком основного винта-рейки и имеет щаг нарезки, соответствующий шагу нарезки основного винтарейки.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНДУКТИВНАЯ СИСТЕМА ДЛЯ ОТСЧЕТА И ИЗМЕРЕНИЯ ЛИНЕЙНЫХ НЕРЕМЕЩЕНИЙ РАБОЧИХ ОРГАНОВ СТАНКОВ | 1973 |
|
SU361838A1 |
| МЕХАНИЗМ ВНУТРИШАГОВОГО ДЕЛЕНИЯ ДЛЯ ПОЗИЦИОННБ1Х СИСТЕМ ПРОГРАММНОГО УПРАВЛЕНИЯ | 1970 |
|
SU286462A1 |
| Индуктивный датчик | 1960 |
|
SU132032A1 |
| Способ уменьшения неточности обработки, возникающей в результате тепловых деформаций прецизионных станков | 1957 |
|
SU118067A1 |
| Индуктивный датчик | 1957 |
|
SU112464A2 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО для ОТСЧЁТА ПЕРЕМЕЩЕНИЙ | 1969 |
|
SU243844A1 |
| Индуктивный датчик линейных перемещений | 1956 |
|
SU108631A2 |
| КОРРЕКЦИОННОЕ ВИНТОВОЕ УСТРОЙСТВО | 1965 |
|
SU224258A1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ОТСЧЕТА ПЕРЕМЕЩЕНИЙ | 1972 |
|
SU358103A1 |
| УСТРОЙСТВО для ПРЕДВАРИТЕЛЬНОГО НАБОРА КООРДИНАТ | 1969 |
|
SU240455A1 |
