1
Известна индуктивная система для отсчета и измерения линейных перемещений рабочих органов станков, в которой механизм отсчета долей шага взаимодействует с гайкой-датчиком механизма отсчета целых шагов.
Однако для изготовления такой системы требуется большое количество прецизионных деталей. Кроме того, трудно обеспечить синхронизацию работы двух индуктивных систем.
Цель предлагаемой системы - повышение точности установки координат.
Для этого в предлагаемой системе механизм отсчета долей шага выполнен в виде клинового элемента, кинематически связанного с гайкой-датчиком.
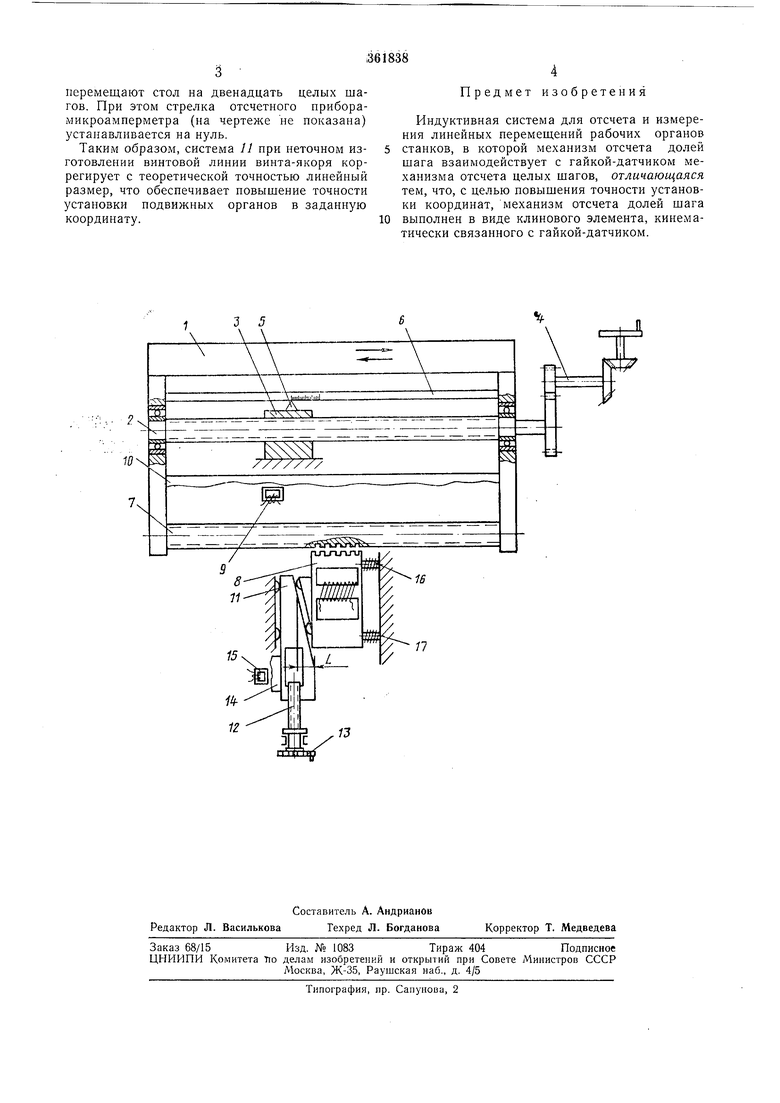
На чертеже изображена предлагаемая система.
Стол / стайка получает возвратно-поступательное перемещение с помощью транспортного виита 2, вращающегося в неподвижной гайке 3. Вращение передается от привода 4. Количество целых щагов (импульсов) определяется указателем 5 по линейке 6. Укрепленный на столе винт-якорь 7 отсчетной индуктивной системы электрически взаимодействует с гайкой-датчиком 8 отсчетной индуктивной системы и обеспечивает установку стола иа целые щаги, а датчик 9 и коррекционная линейка 10 обеспечивают коррекцию накопленной ошибки винта-якоря 7. Клин И, перемещающийся в поперечном направлении по направляющим качеиия посредством микровинта 12, при помощи лимба 13 передвигает гайку-датчик 8 на величину L шага винтаякоря 7. Коррекционная линейка 14 и датчик 15 производят коррекцию ошибок перемещения гайки-датчика 8, т. е. коррекцию внутришаговой ошибки устройства. Гайка-датчик перемещается по направляющим скалкам 16
и возвращается в исходное положение пружинами 17. Коррекциониые механизмы, состоящие из коррекциониых линеек 10 и 14 и соответственно датчиков 9 и 15, иа схеме показаиы индуктивными, хотя в действующих конструкциях коррекция может производиться любыми известными механическими, электрическими и другими способами. Система работает следующим образом. Сначала при помощи лимба 13, микровиита
12 и клииа 11 перемещают гайку-датчик 8 на требуемую долю шага (остаток от деления задаиной координаты на величину шага винтаякоря 7), а затем приводом 4 иеремещают стол / (подвижный оргаи станка) на необходимое количество целых щагов.
Например, если при шаге винта-якоря 3 мм требуется переместпть стол станка на37,4л(л, то сначала по лимбу 13 набирают размер 1,4 мм (37,4 мм : 3 мм 12 шагов и 1,4 мм
в остатке), а затем при помощи привода 4
перемещают стол на двенадцать целых шагов. При этом стрелка отсчетного приборамикроамперметра (на чертеже пе показана) устанавливается на нуль.
Таким образом, система // при неточном изготовлении винтовой линии винта-якоря коррегирует с теоретической точностью линейный размер, что обеспечивает повышение точности установки подвижных органов в заданную координату.
Предмет изобретения
Индуктивная система для отсчета и измерения линейных перемеш,ений рабочих органов станков, в которой механизм отсчета долей шага взаимодействует с гайкой-датчиком механизма отсчета целых шагов, отличающаяся тем, что, с целью повышения точности установки координат, механизм отсчета долей шага выполнен в виде клинового элемента, кинематически связанного с гайкой-датчиком.