Изобретение относится к горнорудному транспорту, в частности к рабочему органу погрузочной машины.
Цель изобретения - повышение производительности и надежности рабочего органа погрузочной машины.
На фиг. 1 схематически изображен рабочий орган погрузочной машины; на фиг. 2 - рабочий орган в момент, размыкания захватов.
Рабочий орган погрузочной машины включает расположенный в коробе 1 корпус 2 лапы с упорами 3 и механизмом пере- меш.ения в виде гидроцилиндра 4. Внутри корпуса 2 лапы расположен дополнительный гидроцилиндр 5, шток 6 которого выполнен, с захватами 7. Между штангой 8 с конусом 9 для захвата и передней стенкой 10 корпуса 2 лапы расположена дополнительная пружина 11, а между передней стенкой 10 корпуса 2 лапы и штангой 12 расположена вторая дополнительная пружина 13.
Штанга 12 при помош,и крюка 14 соединена с концевой частью 15 гибкого элемента 16, ра сположенного внутри пружины 17. Пружина 17 размешена между штангой 12 и гребком 18.
Рабочий орган работает следующим образом.
Для обеспечения колебательных движений гребка 18 включается гидроцилиндр 5 на выдвижение истока 6 с захватами 7. Происходит захват конуса 9 штанги 8. При втягивании штока 6 штанга 8, перемешаясь, сжимает пружину 13 и в то же время освобождает пружину 11.
При размыкании захватов 7, которое происходит автоматически при подходе их к упорам 3, пружина 13 придает штанге 8 поступательное движение вперед и за счет инерции штанги 8 сжимает пружину 11.
При каждом выдвижении вперед, штанга 8 будет взаимодействовать через пружину 17 и гребок 18 на куски горной массы и обрушать их.
Таким образом, использование предлага- емого рабочего органа обеспечивает неоднократное его воздействие на обрчшаемую горную массу.
Формула изобретения
Рабочий орган погрузочной машины по авт. св. № 1173045, отличающийся тем, что, с целью повышения производительности рабочий орган снабжен дополнительными пружинами и расположенной в корпусе лапы штангой, связанной посредством захвата с дополнительным гидроцилиндром, при этом дополнительные пружины установлены на штанге последовательно между дополнительным гидроцилиндром, корпусом лапы и основной пружиной.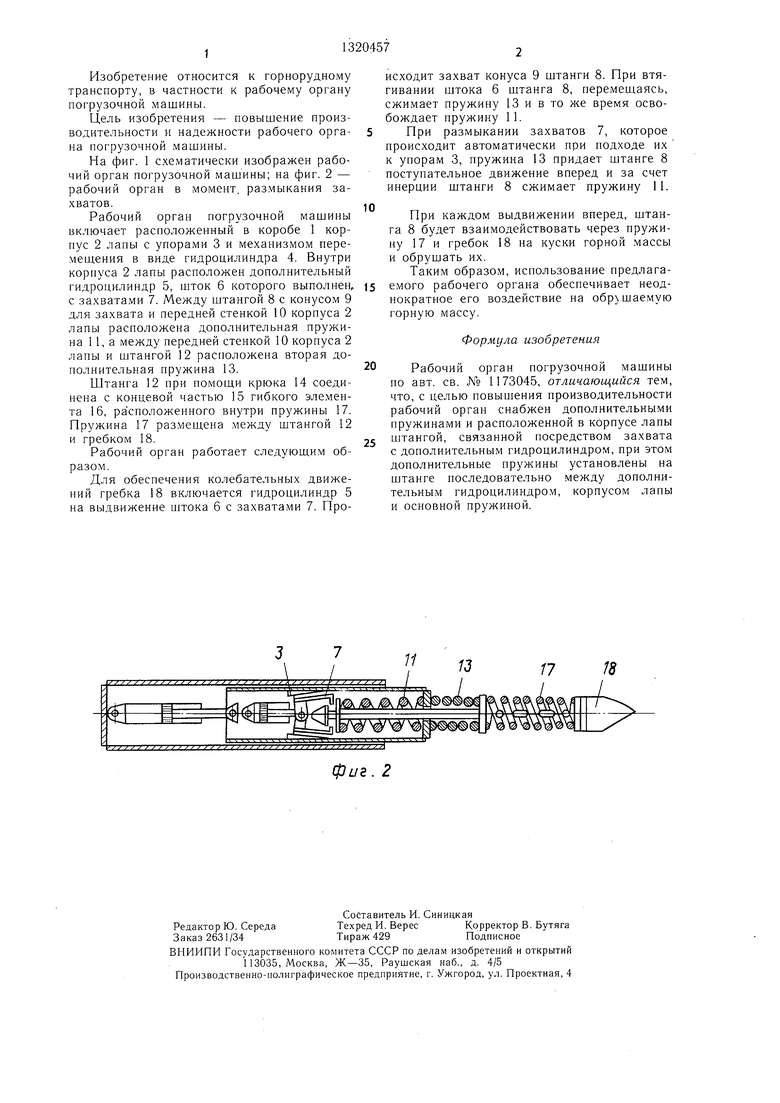
| название | год | авторы | номер документа |
|---|---|---|---|
| Многогребковый погрузочный орган | 1990 |
|
SU1721268A1 |
| Рабочий орган погрузочной машины | 1984 |
|
SU1173045A2 |
| Погрузочный орган | 1989 |
|
SU1709120A1 |
| МНОГОГРЕБКОВЫЙ ПОГРУЗОЧНЫЙ ОРГАН | 1996 |
|
RU2112145C1 |
| ПОГРУЗОЧНЫЙ ОРГАН АКТИВНОГО ДЕЙСТВИЯ | 2010 |
|
RU2467172C2 |
| Погрузочная машина | 1983 |
|
SU1155779A1 |
| Рабочий орган погрузочной машины | 1985 |
|
SU1314126A1 |
| Погрузочная машина | 1984 |
|
SU1155781A1 |
| Проходческий комбайн | 1981 |
|
SU1036928A1 |
| Рабочий орган погрузочной машины | 1990 |
|
SU1795122A1 |
Изобретение относится к горнорудному транспорту и является усовершенствованием известного устр-ва. Цель - повышение производительности и надежности рабочего органа погрузочной машины. Рабочий орган включает расположенный в коробе 1 корпус (К) 2 лапы с упорами 3 и гидроцилиндр (ГЦ) 4. Внутри К 2 лапы расположен дополнительный ГЦ, 5, шток 6 которого выполнен с захватами 7. Между штангой 8 с конусом 9 для захвата и передней стенкой 10 К 2 лапы расположена дополнительная пружина (ДП) 11. Между передней стенкой 10 К 2 и дополнительной штангой 12 расположены вторая ДЦ 13. Пружина 17 разме цена между штангой 12 и гребком 18. Для обеспечения колебательных движений гребка включается ГЦ 5. Шток 6 с захватами 7 выдвигается и происходит захват конуса 9 штанги 8. При подходе захвата 7 к упорам 3 происходит их автоматическое размыкание. При этом ДП 13 придает штанге 8 поступательное движение вперед. Она сжимает ДП 11 и при каждом движении вперед воздействует через пружину 17 и гребок 18 на куски горной породы и обрушает ее. 2 ил. «о (Л 2 5 S3 7 (риг. 7 со ts:) о СП %. Ч hJ
17
18
фиг. 2
| Рабочий орган погрузочной машины | 1984 |
|
SU1173045A2 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
