ч и 2. Рабочий орган по п.1, о т л и- хушйндра сообщены соответственно со ающийся тем, что поршневая штоковой и поршневой полостями дополштоковая полости основного гидро- нительного гидроцилиндра. 1173045
| название | год | авторы | номер документа |
|---|---|---|---|
| Погрузочный орган горной машины | 1984 |
|
SU1218149A1 |
| Устройство для регулирования положения исполнительного органа горной машины | 1987 |
|
SU1461910A1 |
| Погрузочно-транспортная машина | 1990 |
|
SU1767197A1 |
| Погрузочная машина | 1983 |
|
SU1155779A1 |
| ГИДРОСИСТЕМА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2003 |
|
RU2252909C2 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2003 |
|
RU2264347C2 |
| Погрузочная машина | 1983 |
|
SU1086188A1 |
| Гидропривод погрузочной машины | 1983 |
|
SU1126702A1 |
| ГРУЗОПОДЪЁМНАЯ СТРЕЛА КРАНО-МАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2002 |
|
RU2240973C2 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2002 |
|
RU2240971C2 |

1. РАБОЧИЙ ОРГАН ПОГРУЗОЧНОЙ МАШИНЫ по авт.св. № 1051324, отличающийся тем, что, с целью повышения надежности рабочего органа и производительности, корпус лапы выполнен из телескопически расположенных концевой и головной частей с гидр,оцилиндром их выдвижения, а гибкий элемент посредством дополнительного гидроцилиндра соединен с головной частью корпуса лапы. (puzj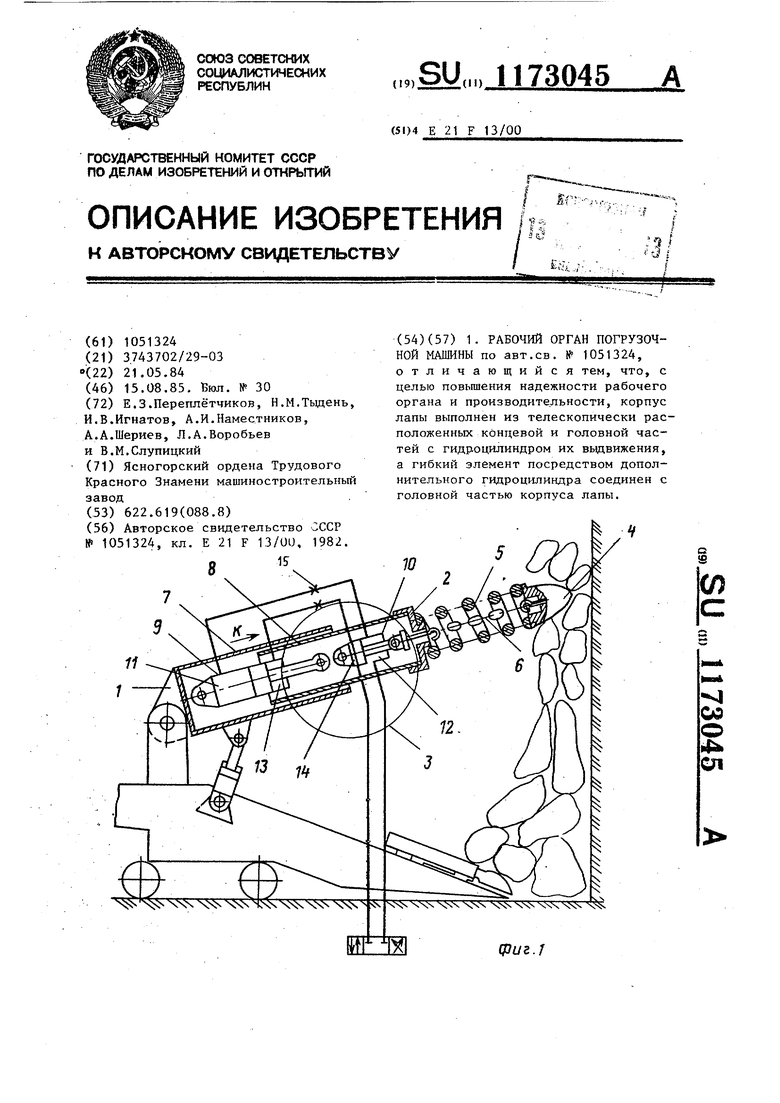
.
Изобретение относится к горнорудной технике, в частности к рабочим органам погрузочных машин, работающих в условиях отбойки горной массы погрузки и транспортировки, и является дополнительным к авт.св. . № 1051324.
Целью изобретения является повышение надежности рабочего органа и производительности.
На фиг,1 - 2 показан рабочий орган в двух положениях.
Рабочий орган включает стрелу 1 с лапой 2, имеющей корпус 3, на конце которого закреплен гребок 4, пружину 5, связывающую одну часть гребка с другой. Гибкий элемент 6 расположен внутри пружины 5. Корпус 3 лапы выполнен из телескопически, расположенных концевой и головной частей 7 и 8 с гидроцилиндром 9 их выдвижения. Гибкий элемент посредством дополнительного гидроцилиндра 10 соединен с головной частью 8 корпуса лапы.
Поршневая полость 11 гидроцилиндра 9 сообщена со щтоковой полостью 12 гидроцилиндра 10, а штоковая полость 13 гидроцилиндра 9 сообщена с
, 2 (
поршневой полостью 14 гидроцилиндра 10. В магистрали сообщения гидроцилиндров включены вентили 15.
Рабочий орган работает следующим образом.
Перемещением штока гидроцилиндра 10 повьшгают жесткость пружины 5 и рабочего органа. Затем перемещают головную часть 8 корпуса гидроцилиндром 9 от отдельного гидрораспределителя (не показан) и рабочий орган внедряется в массу. В автоматическом режиме работы вентили 15 открывают, при этом происходит увеличение жесткости рабочего органа во время его внедрения в,разрушаемый материал. При необходимости уменьшения жесткости рабочего органа рабочую жидкость подают в поршневую .полость гидроцилиндра 10.
Таким образом, предлагаемое устройство позволяет за счет изменения жесткости рабочего органа снизить уданые нагрузки и повысить эффективность его внедрения в разрушаемый материал, что положительно влияет на повьшгение производительности машины в целом и ее надежность.
(риг, 2
| Рабочий орган погрузочной машины | 1982 |
|
SU1051324A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
