Изобретение относится к пневмоавтоматике, может быть использовано в пневмо- системах управления судовыми двигателями и является усовершенствованием изобретения по авт. св. № 611034.
Цель изобретения - расширение функциональных возможностей путем обеспечения двусторонней работы привода.
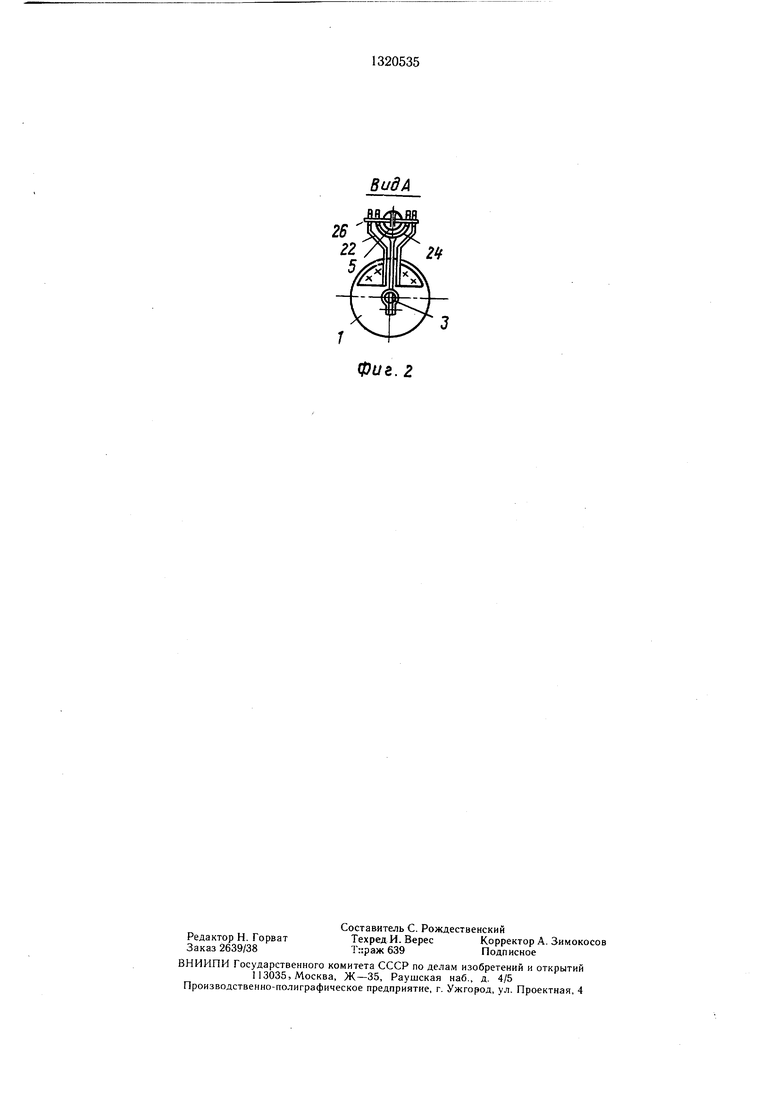
На фиг. 1 изображен пневматический следяший привод; на фиг. 2 - вид А на фиг. 1.
Пневматический следяш,ий привод содержит исполнительный механизм 1 с первым и вторым штоками 2 и 3, пружину 4 обратной связи и дополнительную пружину 5 обратной связи, измерительный преобразователь 6 с измерительными полостями 7, 8 и усилитель 9 с мембранно-клапанными узлами 10 и 11, полыми штоками 12 и 13, связанными между собой пружиной 14, установленной в разделительной полости 15. Штоки 12 и 13 жестко связаны между собой и с выходом преобразователя 6, камеры 16 и 17 узлов 10 и 11 соединены с полостями 18 и 19 механизма 1, а полость 15 подключена к каналу 20 питания. При этом пружины 4 и 5 соединены с концами штоков 2 и 3 с помош.ью размыкаемых опор, а второй конец пружины 5 соединен со штоками 12 и 13. Размыкаемые опоры выполнены в виде неподвижных элементов 21, 22 и охваченных последними подвижных элементов 23 и 24, соединенных со штоками 2 и 3 соответственно. На концах пружин 4 и 5 закреплены стержни 25 и 26, опертые на элементы 21, 23 и 22, 24 соответственно, каждый со стороны, противоположной штоку 12 (13). К полостям 7 и 8 подключены каналы командных давлений PI, Р. Штоки 2 и 3 соединены с поршнем 27.
Пневматический следящий привод работает следуюш1им образом.
При наличии давления в канале 20 питания и отсутствии командных сигналов Р , Р в результате равнозначности предварительного натяга пружин 4 и 5 обратной связи усилитель 9 устанавливает поршень 27 исполнительного механизма 1 в среднее положение. При этом стержни 25 и 26, на которых закреплены свободные концы пружин 4 и 5, покоятся на подвижных 23, 24 и неподвижных 21 и 22 элементах. При подаче одного из командных сигналов (например Я ) командное давление поступает в полость 7 измерительного преобразователя 6 и, в результате разности площадей, смещает жесткие центры преобразователя 6, а вместе с ними и полые штоки 12 и 13 усилителя 9 вправо. При этом равновесное состояние усилителя 9
нарушается, в результате чего давление в полости 19 исполнительного механизма 1 повыщается, а в полости 18 - снижается. Под действием возникшего перепада пор- шень 27 со штоками 2 и 3 перемещается влево. При этом подвижный элемент 23 отрывает стержень 25 от неподвижного элемента 21 и растягивает пружину 4 обратной связи до момента возврата усилителя 9 в равновесное состояние. Одновременно под- вижный элемент 24 отрывается от стержня 26, оставляя его на неподвижном элементе 22.
Увеличение командного давления Р 5 увеличивает перемещение поршня 27 влево, наоборот, снижение командного давления Р до нуля вызывает возвращение поршня 27 в среднее положение. При подаче командного давления Р в полость 8 измерительного преобразователя 6 штоки 12 и 13 усилителя 9 0 смещаются влево и вызванный дисбаланс усилителя 9 влечет за собой перемещение поршня 27 со штоками 2 и 3 вправо, при этом вся работа элементов привода аналогична описанной.
5 Расширение функциональных возможное тей привода позволяет применить его в области дистанционного управления судовыми реверсивными дизелями, а также в следящих системах дистанционной связи.
30
Формула изобретения
1. Пневматический следящий привод по авт. св. № 611034, отличающийся тем, что, с целью расширения функциональных возможностей, исполнительный механизм снаб- 35 жен вторым штоком, дополнительной пружи ной обратной связи и двумя размыкаемыми опорами, а измерительный преобразователь выполнен с двумя измерительными полостями, при этом пружины обратной связи
. соединены с концами штоков исполнитель- 40
ного механизма с помощью размыкаемых
опор, а второй конец дополнительной пружины обратной связи соединен с полыми штоками усилителя.
45 2. Привод по п. 1, отличающийся тем, что каждая размыкаемая опора выполнена в виде неподвижного элемента и охваченного последним подвижного элемента, соединенного со штоком исполнительного механизма, а на конце каждой пружины закреплен стер50 жень, опертый на подвижный и неподвижный элементы со стороны, противоположной штоку усилителя.
фиг. 2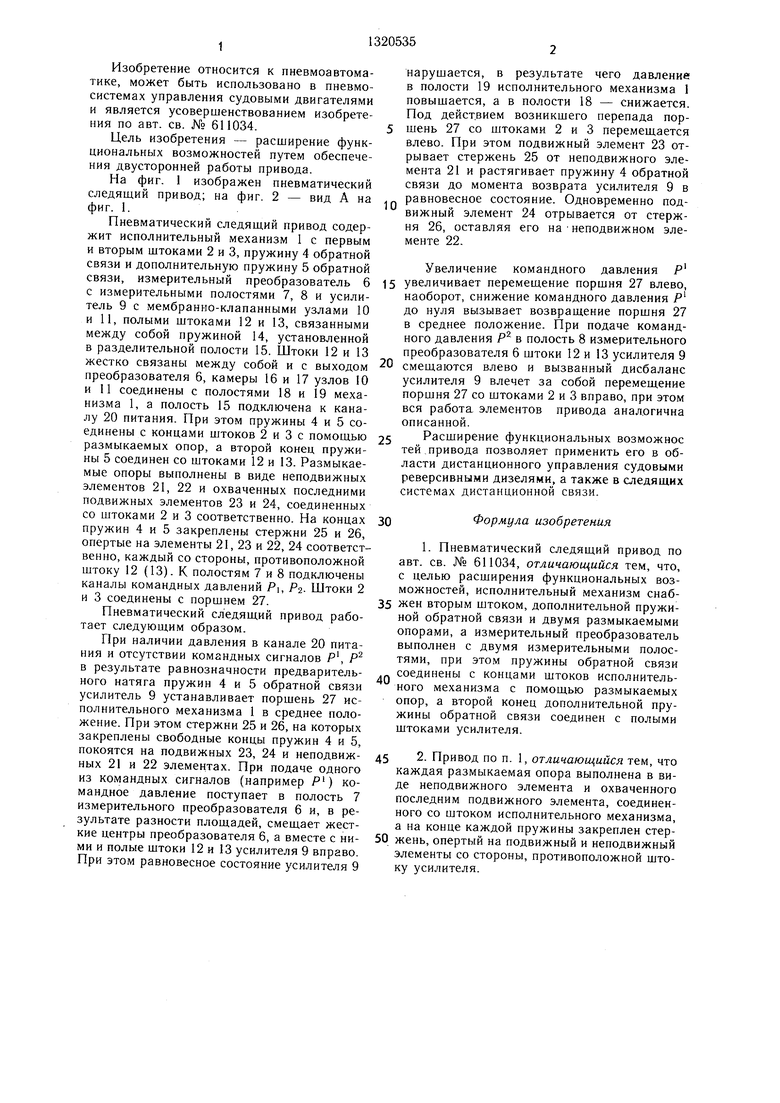
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический следящий привод | 1983 |
|
SU1191624A2 |
| Пневматический следящий привод | 1976 |
|
SU611034A1 |
| Пневматический усилитель гидропривода управления сцеплением транспортного средства | 1990 |
|
SU1785924A1 |
| Усилитель регулятора давления газа | 2020 |
|
RU2729097C1 |
| Усилитель регулятора давления | 2018 |
|
RU2681513C9 |
| АВТОНОМНЫЙ ГИДРОПРИВОД-БЛОК ЭЛЕКТРОГИДРАВЛИЧЕСКИХ РУЛЕВЫХ МАШИН | 2004 |
|
RU2261195C1 |
| Судовая рулевая машина | 1979 |
|
SU839861A1 |
| ПНЕВМАТИЧЕСКИЙ (ГИДРАВЛИЧЕСКИЙ) СЛЕДЯЩИЙ ПРИВОД, БЛОК КОНЕЧНЫХ ВЫКЛЮЧАТЕЛЕЙ, ПРЕОБРАЗОВАТЕЛЬ ВРАЩЕНИЯ И РАСПРЕДЕЛИТЕЛЬ ДЛЯ ПНЕВМАТИЧЕСКОГО (ГИДРАВЛИЧЕСКОГО) СЛЕДЯЩЕГО ПРИВОДА | 1995 |
|
RU2087752C1 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2002 |
|
RU2237826C2 |
| Пневматический следящий привод | 1981 |
|
SU966329A1 |
Изобретение м. б. использовано в пнев- мосистемах управления судовыми двигателями и является усовершенствованием изобретения по авт. св. № 611034. Целью изобретения является расширение функциональных возможностей путем обеспечения двухсторонней работы привода. Для этого исполнительный механизм (ИМ) 1 снабжен вторым штоком 3 и дополнительной пружиной 5 обратной связи, а измерительный преобразователь 6 выполнен с двумя измерительными полостями 7, 8. Пружины 4, 5 обратной связи соединены с концами штоков 2, 3 с по- мош,ью размыкаемых опор. Второй конец пружины 5 соединен с полыми штоками 12, 13 усилителя 9. Размыкаемые опоры м. б. выполнены в виде неподвижных элементов 21, 22 и охваченных ими подвижных элементов 23, 24, соединенных со штоками ИМ 1. На конце пружин 4, 5 закреплены стержни 25, 26, опертые на элементы 21-24 со стороны, противоположной штоку усилителя 9. Это обеспечивает установку поршня ИМ в среднее положение при подаче командного сигнала, а среднее исходное положение поршня обеспечивает двухстороннюю работу привода. 1 3. п. ф-лы, 2 ил. « (Л 7 18 фиг.7 Ур2 Рлит. 4f со ГчЭ О ел со СП м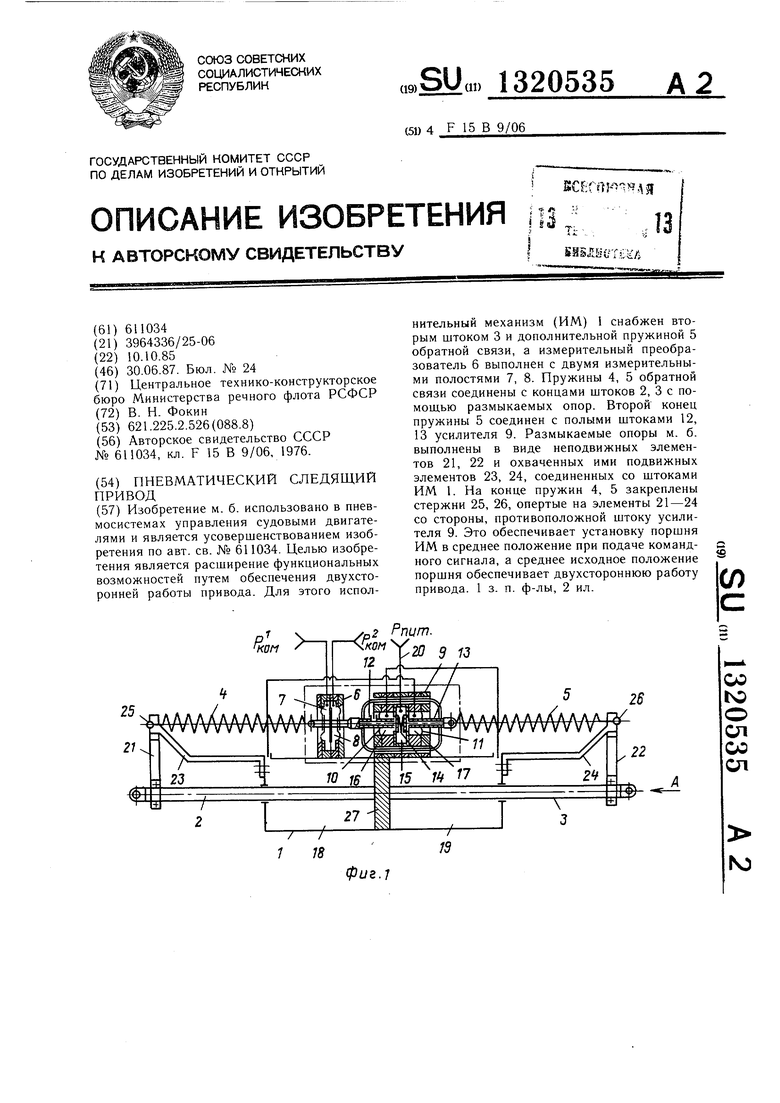
| Пневматический следящий привод | 1976 |
|
SU611034A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
