1 1
Изобретение относится к пневмоавтоматике и может быть использовано в пнемосистемах станков и промышленных роботов и является усовершенствованием технического решения по авт .св. № 6 1034.
Цель изобретения - улучшение динамических характеристик.
На чертеже изображена схема предлагаемого пневматического следящего привода.
Привод содержит исполнительный механизм 1, полый шток 2 которого .. пружиной обратной связи, выполненной из двух частей 3 и 4, соединен с выходом измерительного преобразователя 5, и усилитель 6, состоящий из мембранно-клапанных узлов (не обозначены) с полыми штоками 7 и 8 и клапанами 9 и 10, связанными между собой контактной пружиной 1, установленной в разделительной полости 12 усилителя 6, Штоки 7 и 8 жест- ко .связаны между собой и с выходом преобразователя 5. Камеры 13 и 14 мембранно-клапанных узлов соедине- ны с полостями 15 и 16 механизма 1, а полость 12 подключена к каналу 17 . питания. Штоки 7 и 8 закреплены на жестких центрах (не обозначены ) мягких мембран 18 и 19.
Привод снабжен устройством обратной связи по давлению,вьшолненным в виде камер 20 и 21 переменного объема, связанных с полостями 15 и 16 и образованных дополнительным поршнем 22, установленным в полости (не обозначена ) штока 2 и подпружиненным пружиной обратной связи, части 3 и 4 которой оперты на противоположные стороны поршня 22. Регулировочный винт 23 соединен со штоком 7. Преобразователь 5 имеет мембрану 24, соединенную со штоками 7 и 8.
Пневматический следящий привод работает следующим образом.
При наличии давления в канале 17 изменении командного давления Р. (например, при увеличении мембрана 24 смещает штоки 7 и 8. Клапан 9 прикрывается, а клапан 10 открывается. В камерах 13 и 14 происхоит резкое изменение давления. авление в камере 13 падает, ак как полый шток 7 отрьюается от лапана 9 и сообщает камеру 13 с атосферой, а давление в камере 14 озрастает до значения давления пи916242
тания Рр. Под действием создавшегося перепада давления шток 2.исполнительного механизма 1 перемещается вправо (по чертежу ), возвращая пос- 5 редством пружины обратной связи мембрану 24 измерительного преобразователя 5, а вместе с ней и полые штоки 7 и 8 усилителя 6 в исходное (среднее положение). При зтом в камере 21 0 образованной в штоке 2, давление Р2 равно давлению, в полости 16 исполнительного механизма 1, так как они соединены между собой. Следовательно, на поршень 22 действует усилие, 5 пропорциональное разности давлений в . полостях 15 и 16. Это усилие через пружину обратной связи передается на мембрану 24 измерительного преобразователя 5 и направлено оно таким 0 образом, чтобы вернуть полые штоки 7 и 8 усилителя 6 в исходное положение.
Таким образом, уравнение, баланса сил при этом имеет следующий вид: 5 5; РЗФ C(X-Xo)-()F (1) где F- - усилие, действующее на штоки 7 и 8;
F - эффективная площадь мембраны 24; 0 С - жесткость пружины обратной
связи; , Хр - предварительное растяжение
пружины обратной связи-, X - смещение штока 2 от исходного положения; F - площадь поршня 22; . Р , Р - давление в полостях 15 и 16
соответственно.
Первое слагаемое в правой части 0 определяет задающее усилие, второе слагаемое - отрицательную обратнзпо связь по перемещению, третье слагаемое - отрицательную обратнуто связь по давлению. Из уравнения баланса 5 сил видно, что поршень 22 выполняет функцию отрицательной обратной связи по перепаду давлений в полостях 15 и 16 исполнительного механизма 1. Наличие отрицательной обратной свя- 0 зи по давлению значительно улучшает динамические характеристикиj в частности плавность перемещения и устойчивость пневматического следящего привода, так как позволяет избежать 5 резких скачков усилий на рабочем поршне исполнительного механизма, а следовательно, и скачков его ускорения. Суммирование сигналов обратной
31
связи по перемещению, и давлению на пружине обратной связи улучшает условия работы клапанов пневматического усилителя..
В случае изменения командного давления Р, в сторону уменьшения, штоки 7 и 8 смещаются.вправо (по чертежу). Давление в полости 16 становится больше, чем в полости 15, а усилие на поршень 22 направлено для возврата
1916244
штоков 7 и 8 в исходное положение влево (по чертежу ), Уравнение баланса сип при этом аналогично уравнению (1 )
5 Использование изобретения в пнеьгмосистемах станков, и промьшшенных роботов позволяет ..улучшить кх. динамические характеристики и тем самымt. повысить-эффективность их использо- 10 вания. 
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический усилитель гидропривода управления сцеплением транспортного средства | 1990 |
|
SU1785924A1 |
| Пневматический следящий привод | 1976 |
|
SU611034A1 |
| Пневматический следящий привод | 1985 |
|
SU1320535A2 |
| Пневматическое устройство для контроля положения кромки ленточных материалов | 1990 |
|
SU1747889A1 |
| АППАРАТ НА ВОЗДУШНОЙ ПОДУШКЕ | 2013 |
|
RU2574649C2 |
| Адаптивный пневматический привод с обратной пневматической связью | 2018 |
|
RU2685167C1 |
| ПНЕВМАТИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1973 |
|
SU398763A1 |
| Пневматический следящий привод | 1985 |
|
SU1249207A1 |
| Зубообрабатывающий станок | 1978 |
|
SU749584A1 |
| Пневматический следящий привод | 1983 |
|
SU1137257A1 |
ПНЕВМАТИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД по авт.св. № 611034, отличающийся тем, что, с целью улучшения динамических характеристик, он снабжен устройством обратной связи по давлению, вьтол- ненным в виде камер переменного объема, связанных с полостями исполнительного механизма и образованных дополнительным поршнем, установленным в полости штока исполнительного механизма и подпружиненным пружиной обратной связи, выполненной из двух частей, опертых на противоположные стороны дополнительного поршня. СП ;о о:) to 4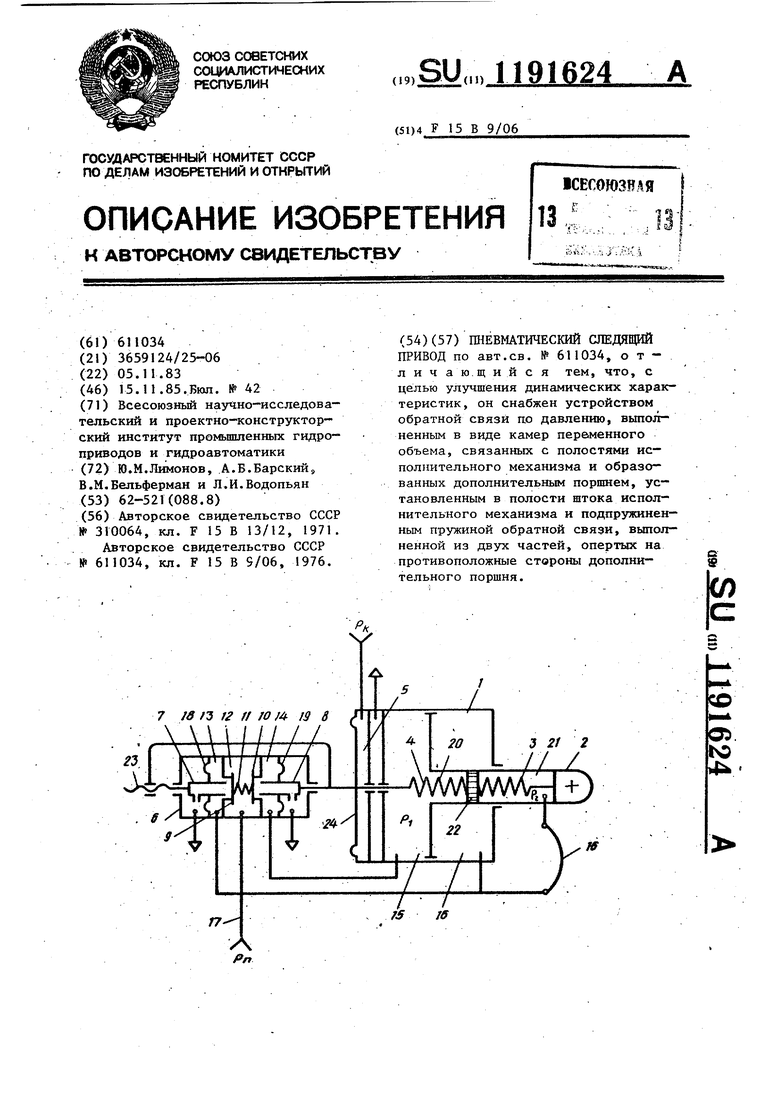
| БЛОК УСИЛЕНИЯ СЛЕДЯЩЕГО СЕРВОПРИВОДА | 0 |
|
SU310064A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| Пневматический следящий привод | 1976 |
|
SU611034A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
