СО
113
Изобретение относится к управлению средствами (механизмами) перемещения заготовок в нагревательной печи и может быть использовано для автоматизации управления перемещением заготовок в методической нагревательной печи, оборудованной механизмом шагающих балок. Такие печи находят применение в металлургической и других отраслях промьшшенности.
Цель изобретения - повышение производительности печи путем снижения ошибки в пути шагающих балок на каждом шаге, начиная с второго.
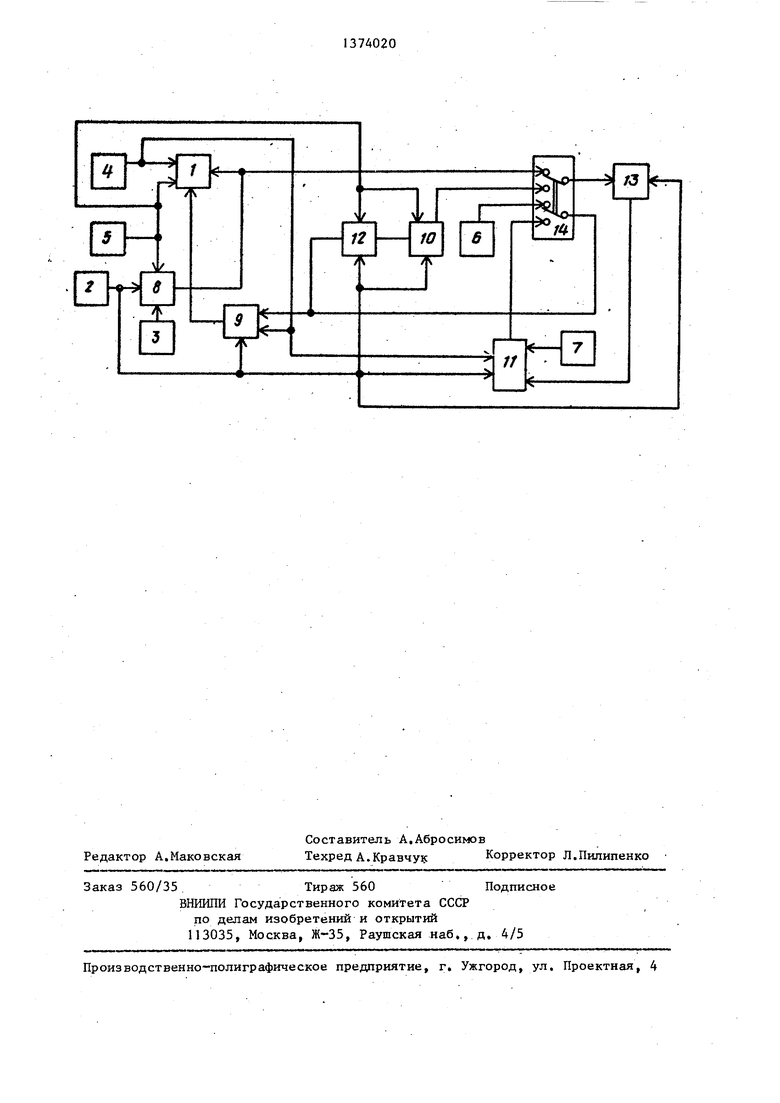
На чертеже изображена схема устройства, реализующего способ управления горизонтальным перемещением шагающих балок в нагревательной печи,
Устройство содержит привод 1 горизонтального перемещения шагающих балок, датчик 2 пути шагающих балок, задатчик 3 положения сечения пода пе-
и вперед соответственно. На трет1ш и четвертый входы привода 1 сигналы поступают с выходов компараторов 9 и 8 соответственно.
В качестве датчика 2 пути перемещения шагающих балок используется кодовый датчик ВКФИ-32-21, выходной сигнал которого представлен одиннадцатиразрядным кодом Грея.
Задатчик 3 положения сечения пода печи может быть выполнен на базе источника питания и 11 тумблеров (II двоичных разрядов), с помощью которых задается в коде Грея цифровой код требуемого положения сечения,
Задатчики 4 и 5 сигналов соответственно пуска назад и вперед привода шагающих балок могут быть выполнены на базе источника питания и кно.ь- пок, обеспечивающих подачу импульсных сигналов на пуск привода горизонтального хода шагающих балок. Функции задатчиков 4 и 5 может выполнять


| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления горизонтальным перемещением шагающих балок в нагревательной печи | 1987 |
|
SU1532788A2 |
| Устройство для управления загрузкой,выгрузкой и перемещением заготовок в нагревательной печи | 1985 |
|
SU1307196A1 |
| Способ управления загрузкой,выгрузкой и перемещением заготовок в печи | 1985 |
|
SU1320631A1 |
| Устройство управления загрузкой печи для нагрева заготовок | 1981 |
|
SU1015219A1 |
| Устройство для управления загрузкой печи для нагрева заготовок | 1979 |
|
SU872925A1 |
| Устройство для управления загрузкой и перемещением заготовок в нагревательной печи | 1982 |
|
SU1054651A1 |
| Устройство управления загрузкой печи для нагрева заготовок | 1981 |
|
SU1019201A1 |
| Устройство для учета перемещаемых изделий | 1985 |
|
SU1324045A1 |
| Устройство управления загрузкой печи для нагрева заготовок | 1982 |
|
SU1062487A1 |
| Способ управления загрузкой, выгрузкой и перемещением заготовок в кольцевой печи | 1989 |
|
SU1696826A1 |
Изобретение относится к области металлургии и может быть использовано для управления горизонтальным перемещением шагающих балок в нагревательной печи. Цель изобретения - по- вышение производительности печи за счет снижения ошибки в пути шагающих балок на каждом шаге, начиная со второго. Сущность изобретения заключает ся в том что при перемещении шагающих балок к зоне загрузки или выгрузки печи учитывается ошибка в ционирования шагакяцих балок на предыдущем шаге перемещения. 7 з.п. ф-лы, 1 ил.
чи, задатчики 4 и 5 сигналов соответ-25 верхний уровень системы автоматичесственно пуска назад и вперед привода шагающих балок, задатчики 6 и 7 первой и второй величин соответственно, компараторы 8, 9,10, сумматоры 11, 12, регистр 13 и коммутатор 14.
Привод 1 горизонтального перемещения шагающих балок представляет собой гидропривод, оборудованный системой непрерывного (плавного) регулирования давления жидкости, пода- ваемой в гидроцилиндры, что позволяет осуществлять операцию торможения горизонтального хода шагающих балок путем равномерного снижения скорости привода. Для этого привод 1 ос- нащается системой контроля времени торможения, выполненной на базе за-- датчика времени торможения, таймера и компаратора, В момент начала торможения запускается таймер (часы), вы- ществляетсЯ сигналом, поступающим
ходная величина которого с помощью компаратора непрерывно сравнивается с выходной величиной (третьей величиной) задатчика времени торможения, В момент равенства сравниваемых веичин привод останавливают с прекращением подачи жидкости в цилиндры гидропривода. На первый и второй входы привода 1 поступают сигналы пуска привода (назад и вперед) с выходов задатчиков 4 и 5 соответственно, На третий и четвертый входы привода 1 поступают сигналы, вызывающие торможение привода при движении назад
кого управления транспортированием заготовок через печь.
Задатчики 6 и 7 обеспечивают : формирование цифрового кода Грея первой и второй величин соответственно. Конструктивно задатчики 6 и 7 могут быть выполнены аналогично задатчику 3.
Компаратор 8 обеспечивает формирование сигнала торможения привода 1 при ходе последнего вперед. На первый и второй входы компаратора 8 поступают опорный и контролируемый сигналы соответственно с выходов задатчика 3 и датчика 2 Компаратор 8 формирует на своем выходе импульсный сигнал в момент равенства опорного и контролируемого сигналов. Инициализация работы компаратора осу0
5
на его третий вход с выхода задатчи- ка 5, т,е. компаратор 8 осуществляет сравнение контролируемого и опорного сигналов только после поступления сигнала на его третий вход и находится в заблокированном состоянии после выдачи импульсного сигнала до поступления сигнала на его третий вход.
Компаратор 9 обеспечивает формирование сигнала торможения привода I при ходе последнего назад. На первый и второй входы компаратора 9 поступают опорный и контролируемый сигналы соответственно с первого выхода коммутатора 14 и выхода датчика 2 пути. На третий вход компаратора 9 поступает сигнал инициализации работы компаратора с выхода задатчика 4, Рабо-- та компаратора 9 аналогична работе компаратора 8.
Компаратор 10 обеспечивает формирование сигнала, инициализирующего запись выходной величины датчика 2 пути в регистр 13, На первый и второй входы компаратора 10 поступают опорный и контролируемый сигналы соответственно с выходов сумматора 12 и датчика 2 пути. На третий вход компаратора 10 поступает сигнал инициализации работы компаратора с выхода задатчика 5. Работа компаратора 10 аналогична работе компаратора 8.
Сумматор 11 обеспечивает суммиро- 20 ° задатчика 5 соединен с вторым
входом привода I, третьим входом к паратора 8, третьим входом суммато 12 и третьим входом компаратора Ю Выходы задатчиков 3 и 7 соединены соответственно с первым входом ком паратора В и первым входом суммато I1. Выход датчика 2 пути соединен вторым входом компаратора 8, вторы входом компаратора 9, nepsiiM входо сумматора 12, вторым входом компар тора 10, третьим входом сумматора и вторым входом регистра 13, первы вход которого соединен с вторым вы ходом коммутатора 14, первый выход которого соединен с первым входом компаратора 9 и вторым входом сумматора 12, выход которого соединен с первым входом компаратора 10, вы ход которого соединен с третьим входом коммутатора 14, второй вход которого соединен с выходом задатч ка 6. Выход компаратора 8 соединен с четвертым входом привода 1 и чет вертым входом коммутатора 14, перв вход которого соединен с выходом сумматора 11. Выход компаратора 9 соединен с третьим входом привода
вание величин, поступающих на его первый, второй и третий входы, в момент поступления сигнала на его четвертый вход с выхода задатчика 4 и сохраняет значение суммы до следующего акта суммирования. На первый, второй и третий входы сумматора поступают сигналы с выходов задатчика 7, регистра 13 и датчика 2 пути соответственно. Сигнал, поступающий на второй вход сумматора 11, суммируется с обратным знаком.
Сумматор 12 обеспечивает суммиро-
вание величин, поступающих на его . первый и второй входы, в момент поступления сигнала на его третий вход с выхода задатчика 5 и сохраняет значение суммы до следующ Л О акта суммирования. На первый и второй входы сумматора 12 поступают сигналы с выхода датчика 2 пути и первого выхода коммутатора 14 соответственно.
Сигнал, поступающий на второй вход сумматора 12, суммируется с обратным знаком.
Сумматоры 11, 12 могут быть выполнены на базе обычного двоичного сумматора и преобразователей (дешифраторов) кодов. Входные сигналы поступают на входы двоичного сумматора через преобразователи кода Грея в двоичный код, а выход двоичного сумматора соединен с входом преобразователя двоичного кода в код Грея.
Регистр 13 предназначен для хра- нения значения выходной величины дат чика 2 пути, наблюдаемой в момент поступления сигнала с второго выхода коммутатора 14 на первый вход ре-,-5
гистра 13. На второй вход регистра 13 поступает выходная величина датчика 2 пути. Запись (обновление) информации в регистр 13 происходит в момент поступления сигнала на его первый вход.
Коммутатор 14 имеет два положения и предназначен для подключения своих первого и второго выходов соответст- венно к первому и третьему входам для второго положения и к второму и четвертому входам для первого положения коммутатора 14.
Статическое состояние устройства характеризуется тем, что илход задатчика 4 соединен с первым входом при- вода 1, третьим входом компаратора 9 и четвертым входом сумматора 11. Вы20 ° задатчика 5 соединен с вторым
25
30
35
40
45
50
55
входом привода I, третьим входом компаратора 8, третьим входом сумматора 12 и третьим входом компаратора Ю. Выходы задатчиков 3 и 7 соединены соответственно с первым входом компаратора В и первым входом сумматора I1. Выход датчика 2 пути соединен с вторым входом компаратора 8, вторым входом компаратора 9, nepsiiM входом сумматора 12, вторым входом компаратора 10, третьим входом сумматора 11 и вторым входом регистра 13, первый вход которого соединен с вторым выходом коммутатора 14, первый выход которого соединен с первым входом компаратора 9 и вторым входом сумматора 12, выход которого соединен с первым входом компаратора 10, выход которого соединен с третьим входом коммутатора 14, второй вход которого соединен с выходом задатчи- ка 6. Выход компаратора 8 соединен с четвертым входом привода 1 и четвертым входом коммутатора 14, первый вход которого соединен с выходом сумматора 11. Выход компаратора 9 соединен с третьим входом привода 1.
В исходном положении устройства коммутатор 14 находится в первом положении. В момент поступления сигнала с выхода задатчика 4 запускается назад (к торцу загрузки печи) привод 1 и инициализируется работа компаратора 9. В момент срабатывания компаратора 9 привод 1-переходит в режим торможения, по оконча- НИИ которого.останавливается. В мо- м ент поступления сигнала с выхода задатчика 5 запускается вперед (к
торцу выгрузки печи) привод 1 и инициализируется работа компаратора 8, 3 момент срабатывания компаратора
8происходит запись выходной величины датчика 2 пути в регистр 13 и привод 1 переходит в режим торможения, по окончании которого останавливается. После остановки привода 1 оператор переводит коммутатор 14 во второе положение.
В момент поступления сигнала с выхода задатчика 4 привод 1 запускается назад, обеспечивается суммирование входных сигналов сумматором 11 и инициализируется работа компаратора 9, В момент срабатывания компаратора
9привод 1 переходит в режим торможения, по окончании которого останавливается,
В момент поступления сигнала с выхода задатчика 5 привод 1 запускается вперед, обеспечивается суммирование входных сигналов сумматором 12 и инициализируется работа компараторов 8 и 10, В момент срабатывания компаратора 10 обеспечивается запись вы--:, ходной величины датчика 2 пути в регистр 13, В момент срабатывания компаратора 8 привод 1 переходит в режим торможения, по окончании которого останавливается.
Далее чередование поступлений выходных сигналов задатчиков 4 и 5 обусловливает циклическую работу устройства (ход балок назад, а затем вперед) в соответствии с приведенным описанием для второго положения коммутатора 14, Перевод устройства в исходное (статическое) состояние осуществляется переключением коммутатора 13 в положение I после оста- j, новки шагающих балок на позиции вы- грузки.
Выполнение способа следует начинать с операции контроля наличия сиг нала запуска назад, с момента появления которого осуществляют движение шагающих балок к торцу загрузки и измеряют пройденный путь с контролем на равенство текущего значения пути значению первой величины. При этом значение первой величины выбирают равным значению разности между заданным значением шчга и заданным значением пути торможения горизонтального хода шагающих балок. Значения шага и пути торможения зависят от конструктивных особенностей механизма шагаю-
0
5
0
5
0
5
0
5
щих балок, его гидропривода и требований (ограничений) технологии транспортирования заготовок через печь, Для выбранной конструкции печи указанные величины являются известными (заданными),
С момента наступления равенства текущего значения пути значению первой величины осуществляют операцию- торможения горизонтального хода шагающих балок, по окончании которой осуществляют операцию контроля наши- чия сигнала запуска вперед, с момента появления которого осуществляют движение шагающих балок к торцу выгрузки с контролем прихода шагающих балок в заданное вертикальное сечение пода печи, С момента прихода шагающих балок в заданное вертикальное сечение пода печи осуществляют операцию торможения горизонтального хода шагающих балок, по окончании которой запоминают путь торможения шагающих балок на торце выгрузки и осуществляют операцию контроля наличия сигнала запуска назад. При этом вертикальное сечение пода печи задают отстоящим на расстояние, равное значению заданного пути торможения, от исходного положения шагающих балок на торце выгрузки в сторону торца загрузки,
С момента появления сигнала запуска назад осуществляют операцию задания требуемого шага балок, по окончании которой осуществляют движение шагающих балок к торцу загрузки и измеряют пройденный путь с контролем на равенство текущего значения пути значению разности между значением второй величины и значением запомненного пути торможения, С момента наступления равенства между текущим значением пути и значением разности осуществляют операцию торможения горизонтального хода шагающих балок, по окончании которой осуществляют контроль наличия сигнала запуска вперед, с момента появления которого осуществляют движение шагающих балок к торцу выгрузки и измеряют пройденный путь с контролем на равенство текущего значения пути значению разности между значением второй величины и значением запомненного пути торможения и с контролем прихода шагающих балок в заданное вертикальное сечение пода печи.
с момента наступления равенства между текущим значением пути и значением разности осуществляют операцию измерения остатка пути, проходимого шагающими балками до полной остановки, и запоминают значение остатка пути, С момента прихода шагающих балок в заданное вертикальное сечение пода печи осуществляют операцию торможения горизонтального хода ща- гающих балок, по завершении которой осуществляют операцию контроля наличия сигнала запуска назад, с момента появления которого осуществляют операцию задания требуемого шага балок и затем операцию цикл, по завершении которой циклически повторяют последовательность из последних трех операций - операции контроля наличия сигнала запуска назад, с момента появления которого осуществляют операцию задания требуемого шага балок и затем операцию цикл.
При этом операцию цикл осуществляют путем выполнения операции движения шагающих балок к торцу загрузки и измерения пройденного пути с контролем на равенство текущего значения пути; значению разности между значением второй величины и значением запомненного остатка пути предыдущего цикла работы шагающих балок. С момента наступления равенства между текущим значением пути и значением разности осуществляют операцию торможения горизонтального хода шагающих балок, по завершении которой осуществляют операцию контроля наличия сигнала запуска вперед, с момента появления которого осуществляют движение шагающих балок к торцу выгрузки и измеряют пройденный путь с контролем на равенство текущего значения пути значению разности между значением второй величины и значением запомненного остатка пути предыдущего цикла работы шагающих балок и с контролем прихода шагающих балок в заданное вертикальное сечение пода печи.
С момента наступления равенства между текущим значением пути и значением разности осуществляют операцию измерения остатка пути, прохбдимого щагающими балками до полной остановки, и запоминают значение остатка пути.
.
15
20
25
740208
С момента прихода шагающих балок в заданное вертикальное сечение пода печи осуществляют операцию торможения горизонтального хода шагающих балок, по завершении которой заканчивают операцию цикл.
При выполнении способа операцию торможения осуществляют одним из двух предложенных вариантов. Тот или иной вариант выбирают исходя из конструктивных особенностей гидропривода горизонтального хода шагагацих балок.
Если гидропривод оборудован системой непрерывного (плавного) регулирования давления жидкости, подавае- мой в гидроцилиндр горизонтального хода шагающих балок, то операцию торможения горизонтального хода шаг гающих балок осуществляют путем равномерного снижения скорости привода горизонтального хода шагаюш 1х балок и измерения времени торможения с контролем на равенство текущего значения времени торможения значению третьей величины. С момента наступления равенства между текущим значением времени торможения и значением третьей величины завершают операцию торможения горизонтального хода шаг гающих балок путем остановки привода .горизонтального хода шагающих балок.
При этом значение третьей величины выбирают равным значению отношения величины рабочей скорости горизонтального хода шагающих балок к величине модуля ускорения, заданного при торможении горизонтального хода шагающих балок.
Если гидропривод оборудован системой ступенчатого изменения расхода жидкости, подаваемой в гидроцилиндр горизонтального хода шагающих балок, то операцию торможения горизонта ьно- го хода шагающих балок осуществляют путем ступенчатого уменьшения скорости горизонтального хода шагающих балок (переходят на пониженную ско- рость) и измерения пути торможения с контролем на равенство текущего значения пути торможения значению четвертой величины, С момента наступления равенства между текущим значением пути торможения и значением четвертой величины завершают операцию торможения горизонтального хода шагающих балок путем остановки привода горизонталы5ого хода шагаюших балок.
30
35
40
45
50
55
913
При этом значение четвертой величины и 1бирают равным значению заданного пути торможения.
Уровень пониженной скорости зависит от конструктивных особенностей механизма шагающих балок и его гидропривода горизонтального хода. Критерием выбора уровня пониженной ско-
рости является ограничение динамичес- д вой-заданной по технологии величины ких нагрузок в механизме щагающих балок на уровне допустимых в процессе остановки привода (прекращения подачи жидкости в гидроцилиндр горизонтального хода). В ряде случаев при . необходимости сокращения времени торможения целесообразно операцию торможения горизонтального хода шагающих балок осуществлять многократным
осуществляют торможение горизонтального хода шагающих балок, по окончанию которого осуществляют контроль наличия сигнала запуска на перемещение шагающих балок вперед, с момента появления которого осуществляют движение шагающих балок к торцу выгрузки с контролем прихода шагающих бало в заданное вертикальное сечение пода
(2-4 ступени) ступенчатым уменьшени-2о печи, с момента прихода шагающих ба
ем скорости горизонтального хода.
В процессе выполнения способа операцию задания требуемого шага балок осуществляют путем присвоения второй величине заданного значения шага балок. В общем случае значение второй величины может быть функцией не только заданного значения шага балок, но и значений пути, проходимых шагающими балками в предыдущих циклах.
Использование способа позволяет получить экономический эффект путем повьш1ения коэффициента использования пода.печи, частичного совмещения во времени операций выгрузки заготовок из печи и перемещения заготовок. Указанные обстоятельства обеспечивают повьш1ение производительности печи и в ряде случаев (при соответствующей системе управления нагревом заготовок) снижение удельных затрат энергии на нагрев заготовок. Кроме того, повьш1ение точности позиционирования заготовок в печи на каждом шаге балок позволяет реализовать более простые и эффективные системы управления всем комплексом механизмов нагревательной печи, что будет способствовать дальнейшему росту производительности печи.
Формула изобретения
10
мента появления которого осуществляют движение шагающих балок к торцу загрузки и измеряют пройденный путь с контролем на равенство текущего значения, пути значению первой заданной по технологии величины, с момента наступления равенства между текущим значением пути и значением пер-
вой-заданной по технологии величины
осуществляют торможение горизонтального хода шагающих балок, по окончанию которого осуществляют контроль наличия сигнала запуска на перемещение шагающих балок вперед, с момента появления которого осуществляют движение шагающих балок к торцу выгрузки с контролем прихода шагающих балок в заданное вертикальное сечение пода
5
30
0
5
5
0
5
лок в заданное вертикально е сечение пода печи осуществляют операцию торможения горизонтального хода шагающих балок, по окончании которой осуществляют контроль наличия сигнала запуска на перемещение шагающих балок назад, отличающий ся тем, что, с целью повышения производительности печи за счет снижения, ошибки в пути шагающих балок на каждом шаге, начиная с второго, запоминают путь торможения шагающих балок на торце выгрузки и с момента поступления сигнала запуска на перемещение шагающих балок назад задают требуемый шаг балок и осуществляют движение шагающих балок к торцу загрузки, измеряют пройденный путь с контролем на равенство текущего значения пути значению разности между значением второй заданной по технологии величины и значением запомненного пути торможения, с момента наступления равенства между текущим значением пути и значением разности осуществляют торможение горизонтального хода шагающих балок, по окончании которого контролируют наличие сигнала запуска на перейещение шагающих балок вперед, с момента появления которого осуществляют движение шагающих балок к торцу выгрузки и измеряют пройденный путь с контролем на равенство текущего значения пути значению разности между значением второй заданной по технологии величины и значением запомненного пути торможения, контроли- руют приход шагающих балок в заданное вертикальное сечение пода печи, с мо-
мента наступления равенства между текущим значением пути и значением разности осуществляют измерение остатка пути, проходимого шагающими балками до полной остановки, и запоминают значение остатка пути, с момента прихода шагающих балок в заданное вертикальное сечение пода печи осуществляют операцию торможения горизонтального хода шагающих балок, по завершении которой циклически последовательно выполняют три операции - контролируют наличие сигнала запуска на перемещение шагающих балок назад, с момента появления которого задают требуемый шаг балок и затем операцию цикл.
0
5
0
5
0
5
0
5
0
заданной по технологии величины определяют равным значению разности между заданным значением шага и значением пути торможения горизонтального хода шагающих балок,
5,Способ по пп,1и2, отличающийся тем, что торможение шагающих балок осуществляют путем равномерного снижения их скорости и измеряют время торможения с контролем на равенство текущего значения времени торможения значению третьей заданной по технологии величины, с момента наступления равенства между текущим значением времени торможения и значением третьей заданной по технологии величины завершают торможение шагающих балок,
6,Способ по п.5, отличающий с я тем, что значение третьей заданной по технологии величины выбирают равным значению отношения величины рабочей скорости хода шагающих балок к величине модуля ускорения, заданного при торможения шагающих балок.
7,Способ попп,1 и2, отличающий с я тем, что торможение шагающих балок осуществляют путем ступенчатого уменьшения скорости шагающих балок и измерения пути торможе- ния с контролем на равенство текущего значения пути торможения значению четвертой заданной по технологии величины, с момента наступления равенства между текущим значением пути торможения и значением четвертой заданной по технологии величины прекращают торможение шагающих балок.