5
(Л
Is3
Oi
ex 4:;:
Изобретение относится к машиностроению и может быт1 иснользовано при создании и разработке новых конструкций манипуляторог.
Цель изобретения - новьипение точности н()зиционир01 ания за счет улучшения динамических характеристик и уменьшения метал:1оем кости.
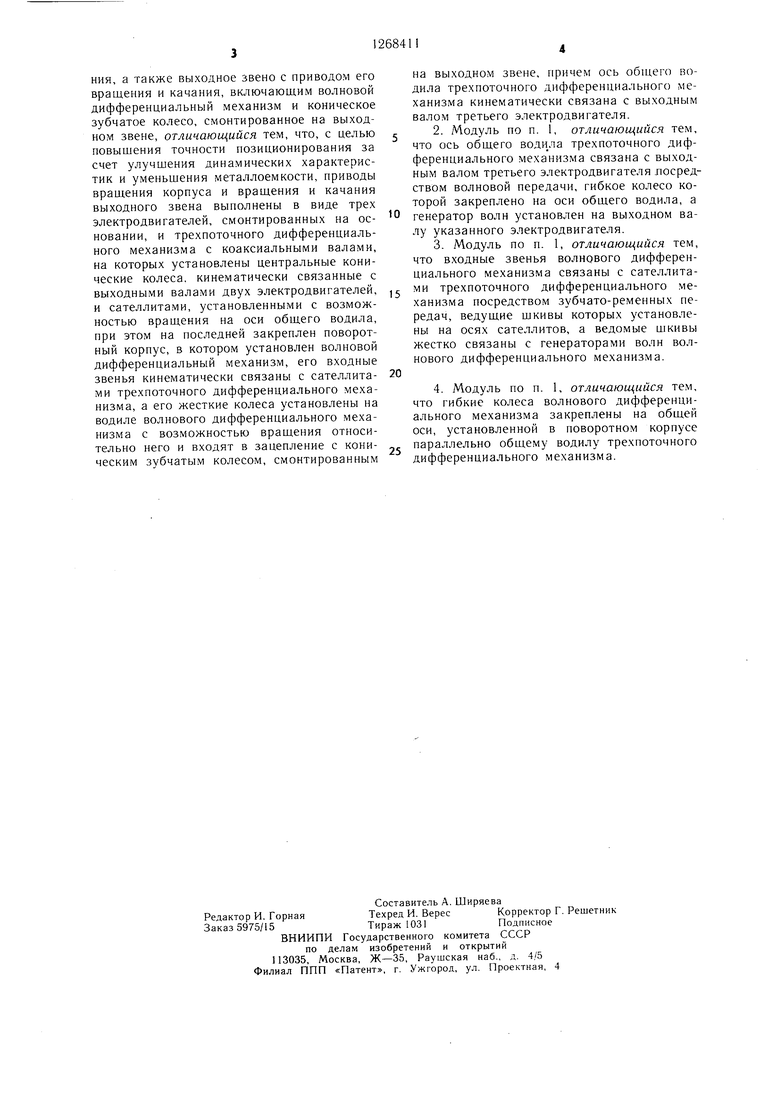
На чертеже изображен нредлагаемый модуль маиинулятора.
Мо;1уль манипулятора содержит основаiHie 1 и установленный в нем новоротный корпус 2, а также выходное звеио 3 со смонтированным на нем коническим зубчатым колесом 4 и приводом вращения новоротного кориуса 2 и вращения и качания выходHoio звена 3, выполненным в виде трех электродвигателей 5, 6 и 7, смонтированных на основании 1, и трехноточного дифференциальиого механизма с коаксиальиьгми валами 8 и 9, на которых установлены центральные конические колеса 10 и 11, нри этом централ конические колеса 10 и 12 связан1)1 соответственно с электродвигате;1ями 5 и 6 иосредством цилиндрических зубчатых передач, колеса 12 и 13 которых смонтированы соответственио на выходных валах электродвигателей 5 и 6, а ведомые колеса 14 и 15 -- на валах 8 и 9. Сате.члиты 16 и 17 трехноточного дифференциального механизма установлен1 1 с возможностью вращения на оси водила 18, причем концы общего водила 18 закреплены в продольных пазах 19 поворотного корнуса 2. Внутри поворотного кориуса 2 разме|цеи волновой дифференциальный механизм, входные звенья 2U и 21 которого связаны соответственно с сателлитами 16 и 17 посредством зубчато-ременных нередач 22 и 23. Ведуихие шкивы зубчато-ремегп ых нередач 22 и 23 жестко связаиы с соответствующими сателлитами 16 и 17, а ведомые - с входными звеньями 20 и 21. Входные звенья 20 и 21 несут тела качения 24 и 25, которыми они взаимодействуют с гибкими колесами 26 и 27 и жесткими колесами 28 и 29 одновременно. Тела качения 24 и 25 выполнены в виде гибких подшипников, а их посадочные места во входных звеньях 20 и 21 имеют форму эллипсов. Гибкие колеса 26 и 27 закреплены на общей оси 30 и взаимодействуют с зубчатыми нарезками, выполненными на жестких колесах 28 и 29.
Жесткие колеса 28 и 29 установлены на водиле 31 волнового дифференциального механизма с возможностью вращения относительно него и входят в зацепление с коническим зубчатым колесом 4, с.моитированным на выходном звене 3. Ось общего водила 18 трехноточного дифференциального меха|ц1зма закреплена в основании 1 с возможностью вращения с номощью гайки 32 и тарельчатой пружины 33 и связана с электродвигателем 7 иосредством волновой
нередачи, гибкое колесо 34 которого с помощью шлицевого соединения закреплено на оси общего водила 18 и взаимодействует своей зубчатой нарезкой с жестким колесом 35, закрепленным на основании 1. Соосно гибкому 34 и жестко.му 35 колесам устарговлен генератор волн, включаюн;ий ведущий диск 36 с телами качения 37 в виде гибких подшипников, а их посадочные .места
в ведущем диске 36 имеют форму эллипсов, U-,
И связанный с электродвигателем 7.
Предлагаемый модуль работает следующим образом.
Вращение выходного звена вокруг оси новоротного корпуса 2 осуществляется вместе
с ним от электродвигателя 7, который цриводит во вранд.ение ведущий диск 36. Ведущий диск 36, воздействуя тела.ми качения 37 на гибкое колесо 34, обеспечивает тем самым вращение на них волны участков гибкого колеса 34, т.е. вращение участков контакта его зубьев с зубьями жесткого колеса 35, а значит и вращение гибкого колеса 34. Гибкое колесо 34 нриводит во вращение общее водило 18 вокруг его оси и сам поворотный корпус 2 за продольные пазы
19. Вращение выходного звена вокруг своей оси осуществляется при вращении жестких колес 28 и 29 в противоположные стороны с одинаковой скоростью, а качание выходного звена вокруг общей оси 30 осуществляется нри враидении жестких колес 28 и 29
в одну и ту же сторону с одинаковой скоростью. Жесткое колесо 29 получает вращение от электродвигателя 6 через зубчатые колеса 13 и 15, центральное коническое колесо 11, сателлит 17, зубчато-ременную передачу 23, входное звено 21, которое, воздействуя своим гибки.м подшипником 25, осуществляет вращение участков контакта зубьев ибкого колеса 27 на жестком колесе 19 и, учитывая, что гибкое колесо 27 закреплено жестко на общей оси 30, вращение получает жесткое колесо 29.
Аналогично жесткое колесо 28 получает вращение от электродвигателя 5 через зубчатые колеса 12 и 14, центральное коническое колесо 10, сателлит 16, зубчато-ре.менную передачу 22, входное звено 20 и гибкое колесо 26. Натяжение зубчато-ременных передач 22 и 23 осуществляется с помощью гайки 32 и поддерживается в процессе эксплуатации тарельчатой пружиной 33. При вращении гайки 32 происходит втягивание общего водила 18, которое, скользя но продольным пазам 19, осуществляет натяжение зубчато-ременных передач 22 и 23.
Формула изобретения
1. Модуль манипулятора, содержащий основание и установленный соосно с ним поворотный корпус с приводом его врангеНИИ, а также выходное звено с приводом его вращения и качания, включающим волновой дифференциальный механизм и коническое зубчатое колесо, смонтированное на выходном звене, отличающийся тем, что, с целью повышения точности позиционирования за счет улучшения динамических характеристик и уменьшения металлоемкости, приводы вращения корпуса и вращения и качания выходного звена выполнены в виде трех электродвигателей, смонтированных на основании, и трехпоточного дифференциального механизма с коаксиальными валами, на которых установлены центральные конические колеса, кинематически связанные с выходными валами двух электродвигателей, и сателлитами, установленными с возможностью вращения на оси общего водила, при этом на последней закреплен поворотный корпус, в котором установлен волновой дифференциальный механизм, его входные звенья кинематически связаны с сателлитами трехпоточного дифференциального механизма, а его жесткие колеса установлены на водиле волнового дифференциального механизма с возможностью вращения относительно него и входят в зацепление с коническим зубчатым колесом, смонтированным на выходном звене, причем ось o6nj,ero tsoдила трехпоточного дифференциального механизма кинематически связана с выходным валом третьего электродвигателя. 2.Модуль по п. 1, отличающийся тем, что ось общего трехпоточного дифференциального механизма связана с выходным валом третьего электродвигателя лосредством волновой передачи, гибкое колесо которой закреплено на оси общего водила, а генератор волн установлен на выходном валу указанного электродвигателя. 3.Модуль по п. 1, отличающийся тем, что входные звенья волнового дифференциального механизма связаны с сателлитами трехпоточного дифференциального механизма посредством зубчато-ременных передач, ведущие щкивы которых установлены на осях сателлитов, а ведомые шкивы жестко связаны с генераторами волн волнового дифференциального механизма. 4.Модуль по п. 1, отличающийся тем, что гибкие колеса волнового дифференциального механизма закреплены на общей оси, установленной в поворотном корпусе параллельно общему водилу трехпоточного дифференциального механизма.
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль манипулятора | 1985 |
|
SU1321584A1 |
| Модуль манипулятора | 1986 |
|
SU1360979A1 |
| Шарнир манипулятора | 1983 |
|
SU1140946A1 |
| Модуль манипулятора | 1986 |
|
SU1433790A1 |
| Шарнир манипулятора | 1987 |
|
SU1516350A1 |
| ШАРНИР С РЕГУЛИРУЕМОЙ ЖЕСТКОСТЬЮ | 2023 |
|
RU2823265C1 |
| Шарнир манипулятора | 1984 |
|
SU1180260A1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО (ЕГО ВАРИАНТЫ) | 1991 |
|
RU2134003C1 |
| Манипулятор модульного типа | 1990 |
|
SU1775289A1 |
| ПРИВОД ПОВОРОТА | 2007 |
|
RU2328442C1 |
Изобретение относится к машиностроению и может быть использовано при создании и разработке новых конструкций .манипуляторов. Целью изобретения является повышение точности позиционирования за счет улучшения динамических характеристик, путем снижения массы подвижных звеньев и уменьшения пар трения скольжения в модуле. Модуль манипулятора содержит основание 1, поворотный корпус 2 и выходное звено 3 с приводами его качания и вращения относительно собственной оси и оси поворотного корпуса, выполненного в виде трех электродвигателей 5, 6 и 7, смонтированных на основании, и трехпоточного дифференциального механизма, обеспечивающего три степени подвижности выходного звена 3. 3 з.п. ф-лы. 1 ил.
| Шарнир манипулятора | 1983 |
|
SU1140946A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
