19
15
П
-А
(О
сл
со со со
I Изобретение относится к робототехнике, |( частности к исполн ительным механизмам : роботов, манипуляторов, и может быть ис- ; пользовано в различных типах многозвен- ;ных роботов-манипуляторов.
Целью изобретения является повышение долговечности и надежности за счет устранения упругодеформированных элементов, обладающих значительными внутренними напряжениями.
На фиг. 1 приведен общий вид модуля манипулятора; на фиг. 2 - разрез А-А на фиг. 1.
Модуль манипулятора содержит, основание 1 и установленный соосно с ним поворотный корпус 2 с приводами его вращения, включающий волновую передачу, выполненную в виде диска с радиальными пазами 3, закрепленного в корпусе 2, жесткого колеса 4, установленного на основании 1, роликов 5, пружинных колец 6, генератора 7 волн, связанного через зубчатое колесо 8 с электродвигателем 9, установленным на основании 1, выходное звено 10 с коническим зубчатым колесом 11 и приводом его вращения I и качания, включающим волновой дифферен- Iциальный механизм, выполненный в виде : соосно р.асположенных дисков 12, 13 с радиальными пазами, установленных на неподвижном валу 14 в корпусе 2, роликов 5, : входящих с одной стороны в радиальные пазы дисков 12, 13 и опирающихся па генераторы 15 волн, 16, а с другой опирающихся на жесткие колеса 17 и 18 и охватываемых пружинными кольцами 19. Генератор 15 волн через центральное конические колесо 20 и выполненное с ним заодно колесо 21, установленные на валу 22, I и шестерню 23 связан с электродвигателем I 24, установленным на основании 1. Вал 22 расположен в прорези 25 качающегося кор- пуса 26, выполненной по длине его ок- ; ружпости на угле максимального качания : относительно вала 14. Жесткие колеса 4, I 17 и 18 внутренней цилиндрической поверх- ности имеют зубчатые нарезки полукруглого профиля, которыми взаимодействуют ролики 5, причём количество впадин в зубчатых нарезках больше, чем число роликов, взаимодействующих с ним. Генератор 16 волн через коническое зубчатое колесо 27, закрепленное на валу 22, связан с элекро- двигателем 28.
Модуль манипулятора работает следующим образом.
Для вращения поворотного корпуса 2 включается электродвигатель 9. Движение передается на зубчатое колесо 8, генератор 7 волн, диск с радиальными пазами 3 и на жестко связанный с ним поворотный корпус 2.
Для приведения в движение выходного звена 10 включаются электродвигатели 24,
28. Движение передается с электродвигателя 24 на зубчатое колесо 23 и далее на зубчатое колесо 21, коническое зубчатое колесо 20, генератор 15 волн, жесткое колесо 18 и коническое зубчатое колесо 11. Одновременно движение передается с электро
двигателя 28 на коническое зубчатое колесо 27, генератор 16 волн, жесткое колесо 17 и коническое зубчатое колесо 11. При вращении жестких колес 17 и 18 с одинаковыми угловыми скоростями в одну сторону будет происходить качание выходного звена 10 вокруг оси вала 14, а при вращении их с одинаковыми уг- ЛОВ.ЫМИ скоростями в разных направлениях- вращение выходного звена 10 вокруг своей оси.
При повороте корпуса 2 происходит обкатывание генераторов 15, 16 волн вокруг зубчатых колес 20 и 27 соответственно, что вызывает дополнительное качание и вращение выходного звена 10,
которое можно компенсировать включением электродвигателей 24, 28 в направлении, противоположном движению обкатки с требуемой угловой скоростью.
Формула изобретения
Модуль манипулятора, содержащий основание, поворотный корпус с приводом его вращения, включающим волновую передачу и электродвигатель, выходное звено с приводом его вращения и качания,
включаюц1им волновой дифференциальный механизм, два других электродвигателя, кинематически связанных с многопоточным дифференциальным механизмом, отличающийся тем, что, с целью повышения долговечности и надежности за счет устранения , упругодеформируемых элементов, обладающих значительными внутренними напряжениями, волновая передача и волновой дифференциальный механизм снабжены роликами, охваченными с торцов пружинными кольцами, в их жестких колесах выполнены радиальные пазы, взаимодействующие с этими роликами, кинематически связанными с другой стороны с соответствующими генераторами волн, причем соосно каждому генератору волн установлены дополнительные опорные диски с пазами, взаимодействующими с указанными роликами, количество которых равно количеству пазов соответствующих дисков, но меньше количества радиальных пазов соответствующих жестких колес.
Г7
П
2k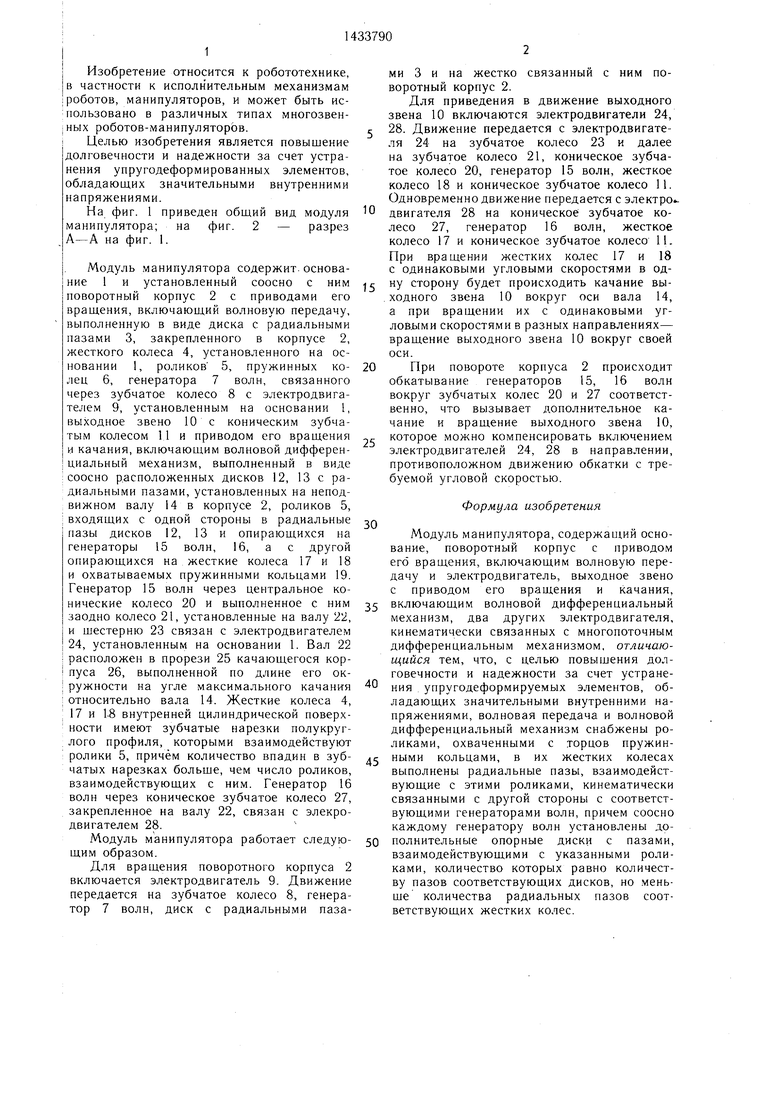
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль манипулятора | 1986 |
|
SU1360979A1 |
| Приводной шарнир манипулятора | 1989 |
|
SU1675079A1 |
| Модуль манипулятора | 1985 |
|
SU1321584A1 |
| Модуль манипулятора | 1985 |
|
SU1268411A1 |
| Шарнир манипулятора | 1983 |
|
SU1140946A1 |
| Модуль руки промышленного робота | 1991 |
|
SU1757869A1 |
| Модуль промышленного робота | 1985 |
|
SU1294600A1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| Шарнир манипулятора Воробьева | 1984 |
|
SU1204375A1 |
| ПОВОРОТНОЕ МЕХАНИЧЕСКОЕ УСТРОЙСТВО | 2000 |
|
RU2188350C1 |
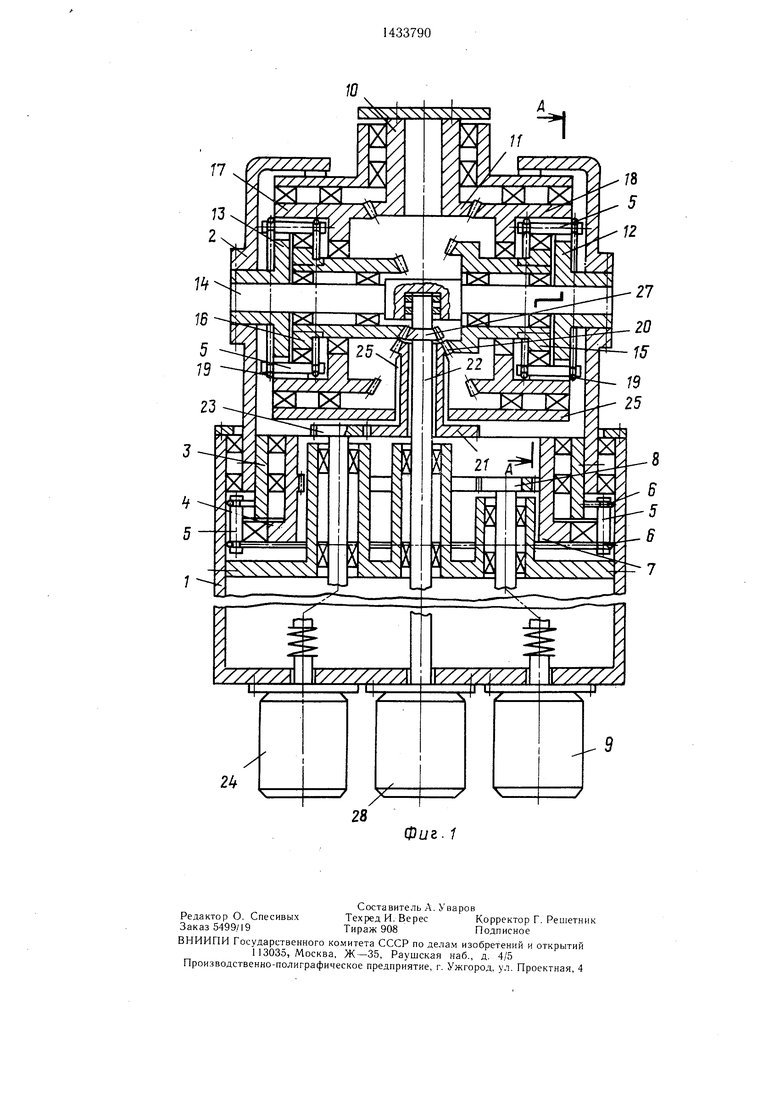
Изобретение относится к робототехнике, в частности к исполнительным механизмам роботов, манипуляторов, и может быть использовано в различных типах многозвенных роботов. Целью изобретения является повышение долговечности и надежности за счет устранения упругодеформи- рованных элементов, обладаюш.их значительными внутренними напряжениями. При вращении генератора волн 15 взаимодействующие с ним ролики, находящиеся в пазах дополнительного опорного диска 12, образуют зацепление с соответствующими пазами жесткого колеса 18, количество которых отлично от количества роликов, а их разница кратна числу волн. Таким образом при неподвижном дополнительном опорном диске 12 происходит редуцированное вращение жесткого колеса 18. 2 ил.
| Модуль манипулятора | 1985 |
|
SU1268411A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
