Изобретение относится к робототехнике, в частности к исполнительным механизмам роботов манипуляторов, и может быть использовано в различных типах многозвенных роботов манипуляторов.
Целью изобретения является снижение металлоемкости за счет уменьшения габаритов модуля.
На чертеже приведен модуль манипулятора, общий вид.
Модуль манипулятора содержит основание 1 и установленный на нем поворотный корпус 2 с качающимся корпусом 3, ось 4 которого неподвижно закреплена в поворотном корпусе 2 и расположена перпендикупрорезях 30 и 31, выполненных в качающемся корпусе 3 и в боковых отверстиях 32 и 33, выполненных в гибких колесах 13 и 14 соответственно. Прорези 30 и 31 5 выполнены в качающемся корпусе 3 по длине его окружности, обеспечивая угол максимального качания качающегося корпуса 3 относительно оси 4.
Модуль манипулятора работает следующим образом.
Для вращения поворотного корпуса 2 включаются электродвигателя 6-8. Движение с выходного вала электродвигателя 6 передается на зубчатое колесо 24 генератора 23 волн, гибкое колесо и на жестко
10
лярно оси поворотного корпуса 2 и основа- связанный с ним поворотный корпус 2.
ния 1. Выходное звено 5 модуля установлено с возможностью вращения в качающемся корпусе 3.
Приводы поворота и качания соответственно поворотного 2 и качающегося 3
При повороте корпуса 2 поворачивается также гибкое колесо. Одновременно зубчатые колеса 27 и 28 обкатываются соответственно внутри и вокруг центральных зубчатых колес 25 и 26, что вызывает дополнительное
корпусов и ротации выходного звена 5 вы- 20 качание качающегося корпуса 3 и вращение
полнены в виде трех электродвигателей 6-8, смонтированных на основании 1, трехпо- точного дифференциального механизма 9 с волновой и коническими передачами.
выходного звена 5, которое компенсируется включением электродвигателей 7 и 8, обеспечивающих вращение центральных зубчатых колес 25 и 26 в направлении, противоВедомое зубчатое колесо 10 конической положном движению обкатки с требуемой
ОпагПЛ М/С ПТ1/Г nOaQQUr г ОиТУПГТииТЛЛ QUPUriM - imn -irn-itl f-, т
передачи жестко связано с выходным звеном 5, а ее ведущие зубчатые колеса 11 и 12 установлены в качающемся корпусе 3 и жестко связаны с жесткими колесами волновой передачи (в данном случае выполнены заодно с жесткими к олесами). Гибкие колеса 13 и 14 волновой передачи установлены соосно на оси 4 кач ающегося корпуса 3, а генераторы 15 и 16 волн установлены на ступицах соответствующих ведомых зубчатых колес конических передач
30
угловой скоростью.
Для ротации (вращения) выходного звена 5 и качания качающегося корпуса 3 включаются электродвигатели 7 и 8. Движение передается через центральные зубчатые колеса 25 и 26, зубчатое колесо 29, сателлиты 27 и 28, конические колеса 17 и 18 на генераторы 16 и 15 волн, гибкие колеса 13 и 14 и жесткие колеса 10 и 11 и далее на коническое колесо 10. Причем при вращении жестких колес 10 и II с одинаковыми угтрехпоточного дифференциального меха- ловыми скоростями в одну сторону будет низма 9. При этом ведущие зубчатые коле- происходить качание качающегося корпуса са 17 и 18 этих передач смонтированы на 3 вокруг оси 4, а при вращении их с оди- выходных валах 19 и 20 трехпоточного диф- наковыми угловыми скоростями в разных
направлениях - вращение (ротация) выходного звена 5 вокруг своей оси. 40
Формула изобретения
ференциального механизма 9, установленных параллельно оси поворотного корпуса 2 на разном расстоянии от нее. Концы выходных валов 19 и 20 установлены с возможностью поворота в отверстиях, выполненных в оси 4 качающегося корпуса 3 и гибком колесе 21 волновой передачи трехпоточного дифференциального механизма 9, закрепленном в поворотном корпусе 2. При этом жесткое колесо 22 волновой передачи жестко связано с основанием 1, а генератор 23 волн посредством зубчатого колеса 24 связан с выходным валом электродвигателя 6.
Трехпоточный дифференциальный механизм 9 также включает центральные зубчатые колеса 25 и 26, установленные на выходных валах соответствующих электродвигателей 7 и 8. Сателлиты (зубчатые колеса) 27 и 28 закреплены на концах соответ45
Модуль манипулятора, содержащий основание, установленный на нем поворотный корпус с качающимся корпусом, ось которого закреплена в поворотном корпусе, причем оси качания и поворота корпусов взаимно перпендикулярны, выходное звено и приводы поворота и качания соответственно поворотного и качающегося корпусов и ро- г„ тации выходного звена, включающие три электродвигателя, смонтированные на основании, трехпоточный дифференциальный механизм с волновой и коническими передачами, и волновую и коническую передачи, ведомое зубчатое колесо последней жестствующих выходных валов 19 и 20, при этом 55 ко связано с выходным звеном, а ее ведущие
центральное зубчатое колесо 26 связано с сателлитом 28 через зубчатое колесо 29. Выходные валы 19 и 20 расположены в
зубчатые колеса установлены в качающемся корпусе и жестко связаны с жесткими колесами волновой передачи, причем гибкие копрорезях 30 и 31, выполненных в качающемся корпусе 3 и в боковых отверстиях 32 и 33, выполненных в гибких колесах 13 и 14 соответственно. Прорези 30 и 31 5 выполнены в качающемся корпусе 3 по длине его окружности, обеспечивая угол максимального качания качающегося корпуса 3 относительно оси 4.
Модуль манипулятора работает следующим образом.
Для вращения поворотного корпуса 2 включаются электродвигателя 6-8. Движение с выходного вала электродвигателя 6 передается на зубчатое колесо 24 генератора 23 волн, гибкое колесо и на жестко
0
связанный с ним поворотный корпус 2.
связанный с ним поворотный корпус 2.
При повороте корпуса 2 поворачивается также гибкое колесо. Одновременно зубчатые колеса 27 и 28 обкатываются соответственно внутри и вокруг центральных зубчатых колес 25 и 26, что вызывает дополнительное
качание качающегося корпуса 3 и вращение
выходного звена 5, которое компенсируется включением электродвигателей 7 и 8, обеспечивающих вращение центральных зубчатых колес 25 и 26 в направлении, противо положном движению обкатки с требуемой
imn -irn-itl f-, т
30
угловой скоростью.
Для ротации (вращения) выходного звена 5 и качания качающегося корпуса 3 включаются электродвигатели 7 и 8. Движение передается через центральные зубчатые колеса 25 и 26, зубчатое колесо 29, сателлиты 27 и 28, конические колеса 17 и 18 на генераторы 16 и 15 волн, гибкие колеса 13 и 14 и жесткие колеса 10 и 11 и далее на коническое колесо 10. Причем при вращении жестких колес 10 и II с одинаковыми угловыми скоростями в одну сторону будет происходить качание качающегося корпуса 3 вокруг оси 4, а при вращении их с оди- наковыми угловыми скоростями в разных
Модуль манипулятора, содержащий основание, установленный на нем поворотный корпус с качающимся корпусом, ось которого закреплена в поворотном корпусе, причем оси качания и поворота корпусов взаимно перпендикулярны, выходное звено и приводы поворота и качания соответственно поворотного и качающегося корпусов и ро- тации выходного звена, включающие три электродвигателя, смонтированные на основании, трехпоточный дифференциальный механизм с волновой и коническими передачами, и волновую и коническую передачи, ведомое зубчатое колесо последней жестко связано с выходным звеном, а ее ведущие
ко связано с выходным звеном, а ее ведущие
зубчатые колеса установлены в качающемся корпусе и жестко связаны с жесткими колесами волновой передачи, причем гибкие колеса волновой передачи установлены соосно оси качающегося корпуса, а ведущие колеса конических передач трехпоточного дифференциального механизма закреплены соответственно на его выходных валах, кроме того, жесткое колесо волновой передачи трехпоточного дифференциального механизма жестко связано с основанием, а ее генератор волн кинематически связан с выходным валом одного электродвигателя, при этом выснижения металлоемкости за счет уменьшения габаритов модуля, гибкое колесо волновой передачи трехпоточного дифференциального механизма жестко связано с поворотным корпусом, при этом выходные валы трехпоточного дифференциального механизма установлены параллельно оси поворотного корпуса, а их концы - с возможностью поворота в отверстиях, выполненных в оси качающегося корпуса, причем
ходные валы двух других электродвигателей IО ведомые колеса конических передач трехсвязаны с центральными колесами трехпоточ-поточного дифференциального механизма
ного дифференциального механизма, а егорасположены на оси качающегося корпуса
сателлиты смонтированы на его выходныхи жестко связаны с соответствующими
валах, отличающийся тем, что, с цельюгенераторами волн волновой передачи.
снижения металлоемкости за счет уменьшения габаритов модуля, гибкое колесо волновой передачи трехпоточного дифференциального механизма жестко связано с поворотным корпусом, при этом выходные валы трехпоточного дифференциального механизма установлены параллельно оси поворотного корпуса, а их концы - с возможностью поворота в отверстиях, выполненных в оси качающегося корпуса, причем
ведомые колеса конических передач трех
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль манипулятора | 1985 |
|
SU1321584A1 |
| Модуль манипулятора | 1985 |
|
SU1268411A1 |
| Модуль манипулятора | 1986 |
|
SU1433790A1 |
| ОПОРНО-ПОВОРОТНОЕ УСТРОЙСТВО (ЕГО ВАРИАНТЫ) | 1991 |
|
RU2134003C1 |
| Шарнир манипулятора | 1987 |
|
SU1516350A1 |
| Шарнир манипулятора | 1983 |
|
SU1140946A1 |
| Привод канатно-угольной пилы | 1984 |
|
SU1191577A1 |
| Манипулятор | 1987 |
|
SU1465300A1 |
| Шарнир манипулятора Воробьева | 1984 |
|
SU1204375A1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
Изобретение относится к робототехнике и может быть использовано в конструкциях различных типов роботов и манипуляторов. Целью изобретения является снижение металлоемкости за счет уменьшения габаритов модуля. Гибкое колесо волновой передачи трехпоточного дифференциального механизма жестко связано с поворотным корпусом 2, генератор волн этой передачи кинематически связан с выходным валом электродвигателя 6. Центральные колеса и сателлиты трехпоточного дифференциального механизма расположены внутри гибкого колеса 21. Выходные валы трехпоточного дифференциального механизма установлены с возможностью поворота в отверстиях, выполненных в оси 4 качающегося корпуса 3 и параллельно оси поворотного корпуса 2, а также связаны с генераторами волн 15 и 16 волновой передачи посредством конических передач трехпоточного дифференциального механизма. 1 ил. (Л со 05 О СО со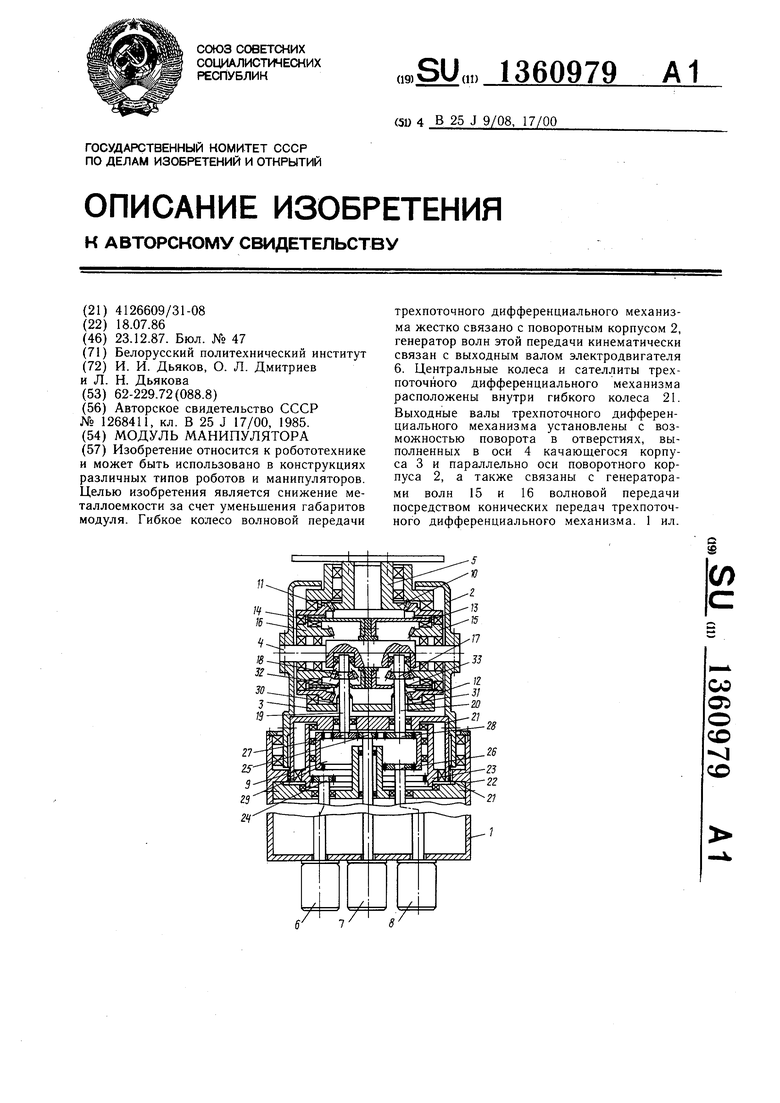
| Модуль манипулятора | 1985 |
|
SU1268411A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
