t1
Ичобретенис относится к маннпуля- :i,noiuibiM устройствам, в частности к млиипуляторам с программным управлением, использующимся, например в автоматических станочных линиях.
Целью изобретения является расширение технологических возможностей за счет увеличения зоны обслуживания а именно увеличения телесного угла, описываемого рабочим инструментом
манипулятора.
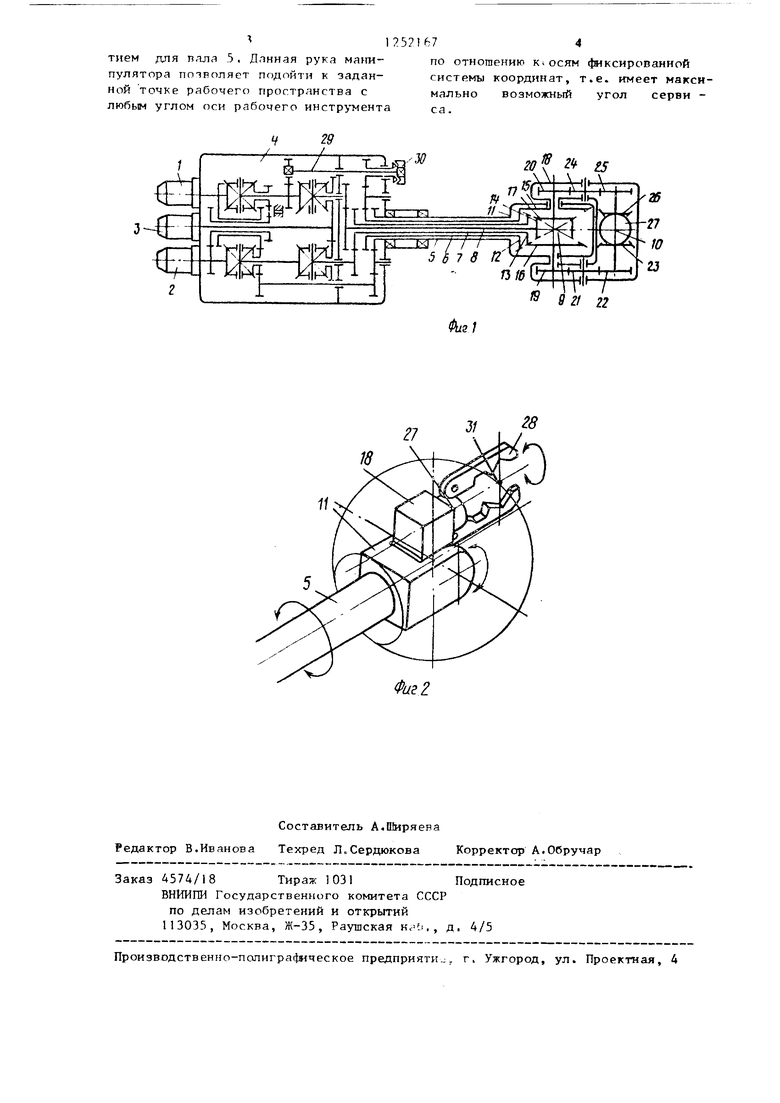
На фиг.1 изображена кинематическая схема руки манипулятора; на фиг .2 внешний вид исполнительных звеньев руки манипулятора и соответствующие им телесные углы, описываемые рабочим инструментом манипулятора.
Рука манипулятора содержит три приводных двигателя 1-3, которые связаны через механизм 4 кинематической развязки и силового замыкани с коаксиальными приводными валами 5-8. Исполнительные звенья руки манипулятора связаны между собой в виде основного 9 и дополнительного
10дифференциальных механизмов. Первый вал 5 жестко связан с водилом
11основного дифференциального ме- хаьгазма 9, а валы 6-8 жестко связа- ны соответственно с центральными коническими зубчатыми колесами 12-1 основного дифференциального механизма 9. Каждое из центральных конических колес 12-14 входит в зацеп- ление с соответствующими сателлитами 15-17, причем первый из сателлитов 15 жестко связан с водилом 18,
а второй и третий сателлиты 16 и 17 жестко связаны с двумя центральными цилиндрическими зубчатыми колесами 19 и 20 дополнительного дифференциального механизма 10. Одно из центральных цилиндрических КОлес 19 утосредством цилиндрических колес 21 и 22 и конического колеса 23, а даугое центральное цилиндрическое колесо 20 посредством цилиндрических колес 24 и 25 и конического ксшеса 26 связано с коническим зуб- чатым колесом 27, установленном на выходном звене, жестко связанным с захватным устройством 28. Передаточные отношения кинематических цепей, связывающие центральные ци- линдрические колеса 19 и 20 с выход HbW звеном, равны по величине и противоположны по знаку.
О
5
0
5
5
0 5 0 5
672
Рука манипулятора содержит также устройство для вмбора люфта в передачах р ридс торшона 29 и муфты 30, фиксирующей торсион я напряжен- ITOM состоянии.
На оси врлшения ных(1дн(1го звена находится рабочая точкп 31, представляющая собой условный центр переносимого объекта или рабочий конец инструмента (например, сварочной горелки), которым может быть оснащен робот.
Рука манипулятора работает сле- дуюпим образом.
При включенном двигателе 1 (двигатели 2 и 3 заторможены) движение через механизм 4 кинематической раз- вязю и силоного замыкания передается коаксиальным валам 5-8 таким образом, что все папучают враше-, ние Б одном направлении с одной и той же скоростью. При этом происходит враиение водила 11 основного дифференциального механизма 9. При включенном двигателе 2 (двигатели 1 и 3 заторможены) движение через механизм 4 кинематической развязки и силового замыкания передается коаксиальным ватам таким образом, что вал 5 остается неподвижным, валы 6 и 8 враща- %тся с одинаковой скоростью и направлением, а вал 7 вращается с той же скоростью, но в противоположном направлении. При этом происходит вра- иение водила 18 дополнительного дифференциального механизма 10. Наконец, при работе двигателя 3 (двигатели I и 2 стоят) вращение через механизм 4 кинематической развязки и силового замыкания передается коаксиальным ткшам, таким образом, что валы 5 и 6 слетаются неподвижными, а валы 7 и 8 вращаются с { пинлковой v кopocтью в одном направлении. При этом получает вращение выходное звено 28.
Торсион 29, зафиксированный в напряженном состоянии с помощью муфты 30, обеспечивает безлюфтовую пере- движения по всем степеням подвижности от двигателей к исполнительным звеньям.
При одновременной работе двигателей происходит пропорциональное сложение движений двух водил 11 и 18 и выходного звена 28. При этом рабочая точка 31 описывает рабочую поверхность, предстарляюпгую собой почти полную сферу г небольшим отверстнем для пллл 5. Длнная рука манипулятора потроляет подойти к заданной точке рабочего пространства с любым углом оси рабочего инструмента
по отношению к осям (}иксированиой системы координат, т.е. имеет максимально возможный угол серви - са.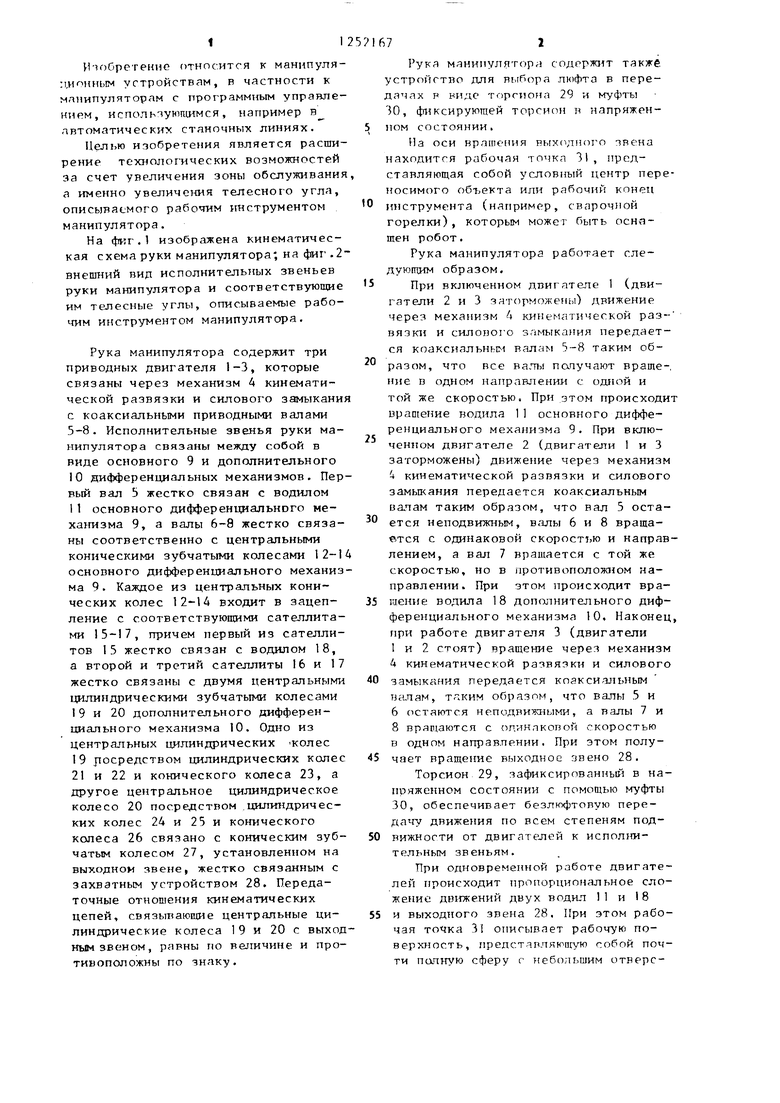
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора | 1985 |
|
SU1256961A1 |
| Рука манипулятора | 1983 |
|
SU1117204A1 |
| Рука манипулятора | 1983 |
|
SU1138312A1 |
| Устройство для оринтации захвата манипулятора | 1977 |
|
SU707793A1 |
| Манипулятор | 1983 |
|
SU1151453A1 |
| ПРИВОДНОЕ УСТРОЙСТВОВСССО1-ОЗНАЯ | 1971 |
|
SU303463A1 |
| Модуль манипулятора | 1985 |
|
SU1321584A1 |
| Шарнир манипулятора | 1984 |
|
SU1189678A1 |
| Манипулятор | 1970 |
|
SU334777A1 |
| Приводное устройство манипулятора | 1980 |
|
SU868194A1 |
/ 1
C5
f MbtJl
:5i2
rf-f KH K
Щ
N
- I
Т
-Я
р(1П
w
20 15
- I
Я
xi ; / / / 7
//
9 12
19
ppp
f/ Z2
21
Фиг г
Составитель А.Ширяева Редактор В.Иванова Техред Л.СердюковаКорректор А.Обручар
Заказ 4574/18Тираж 1031Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж-35, Раушская Нс ,, д, 4/5
Производственно-папигра ическое предприятк.;. г. Ужгород, ул. Проектная, 4
| Устройство для оринтации захвата манипулятора | 1977 |
|
SU707793A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
