Изобретение относится к производству пневматических шин, а именно к устройствам для загрузки невулканизо- ванных покрьшек в форматоры-Звулкани- заторы.
Цель изобретения - автоматизация процесса загрузки покрышек.
На фиг. 1 изображено устройство,
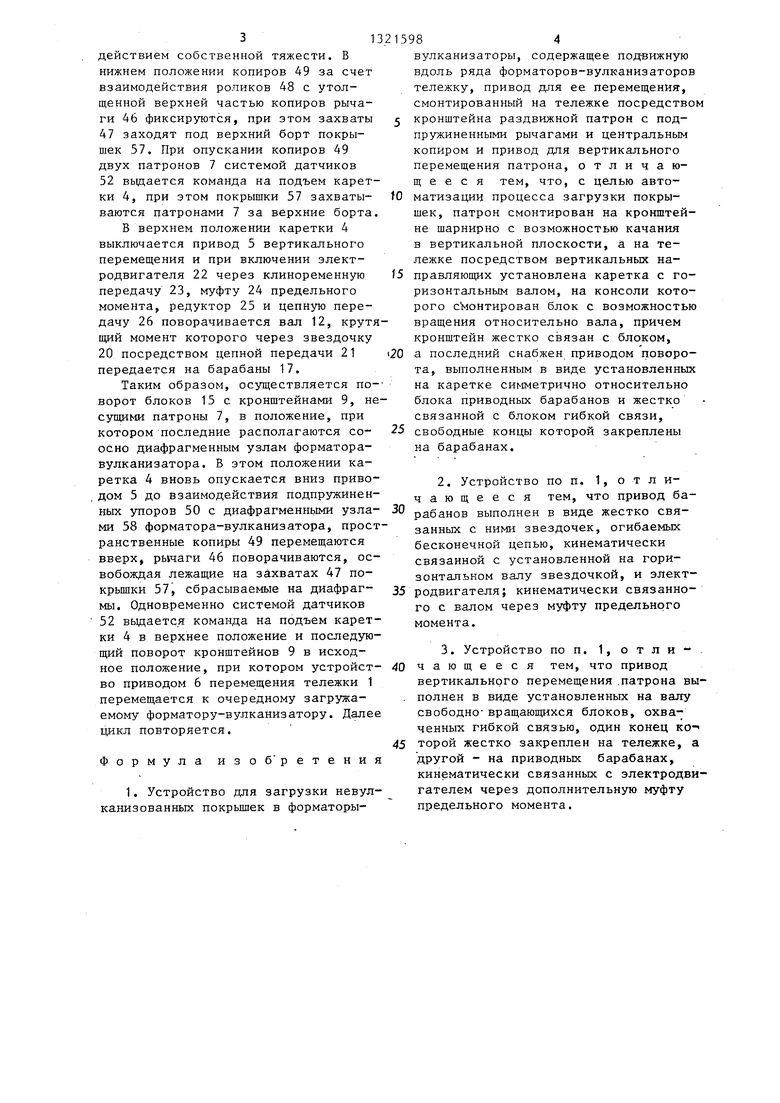
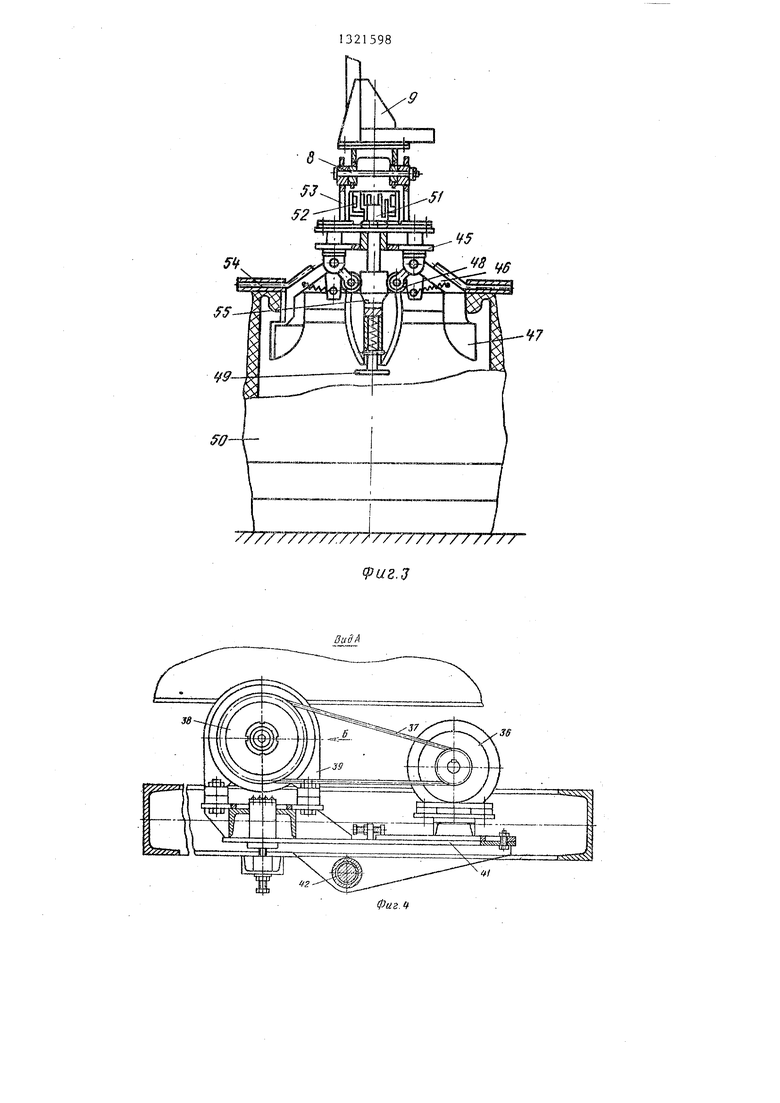
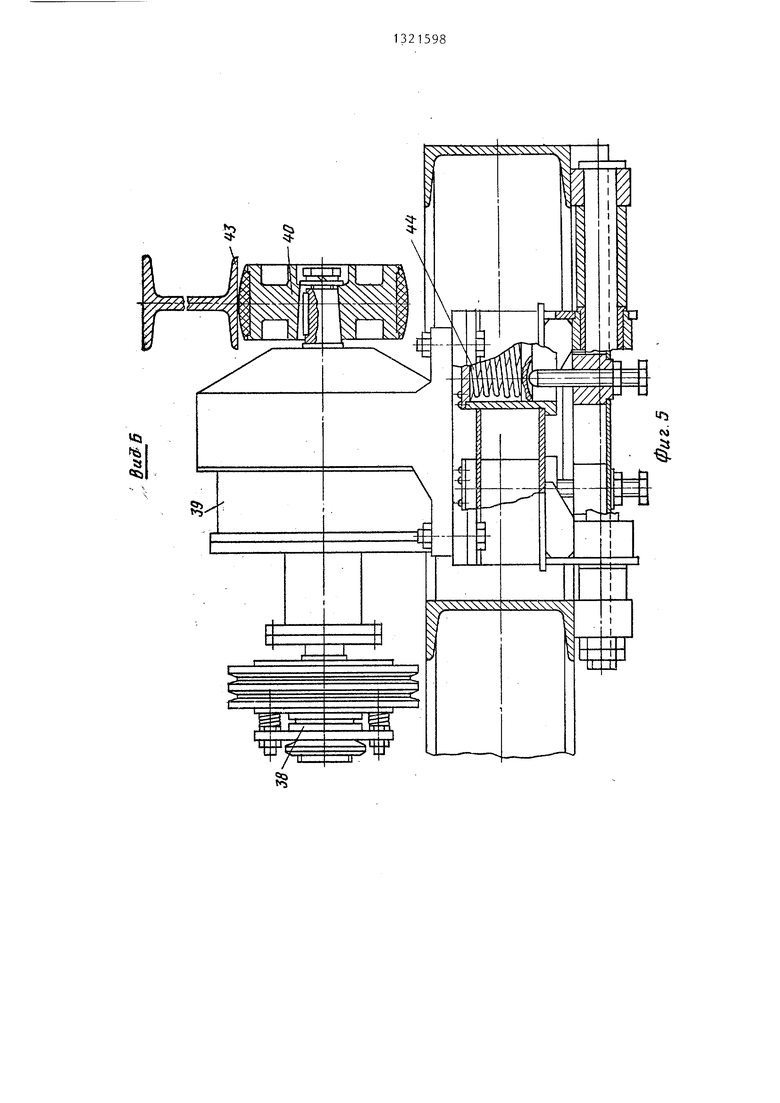
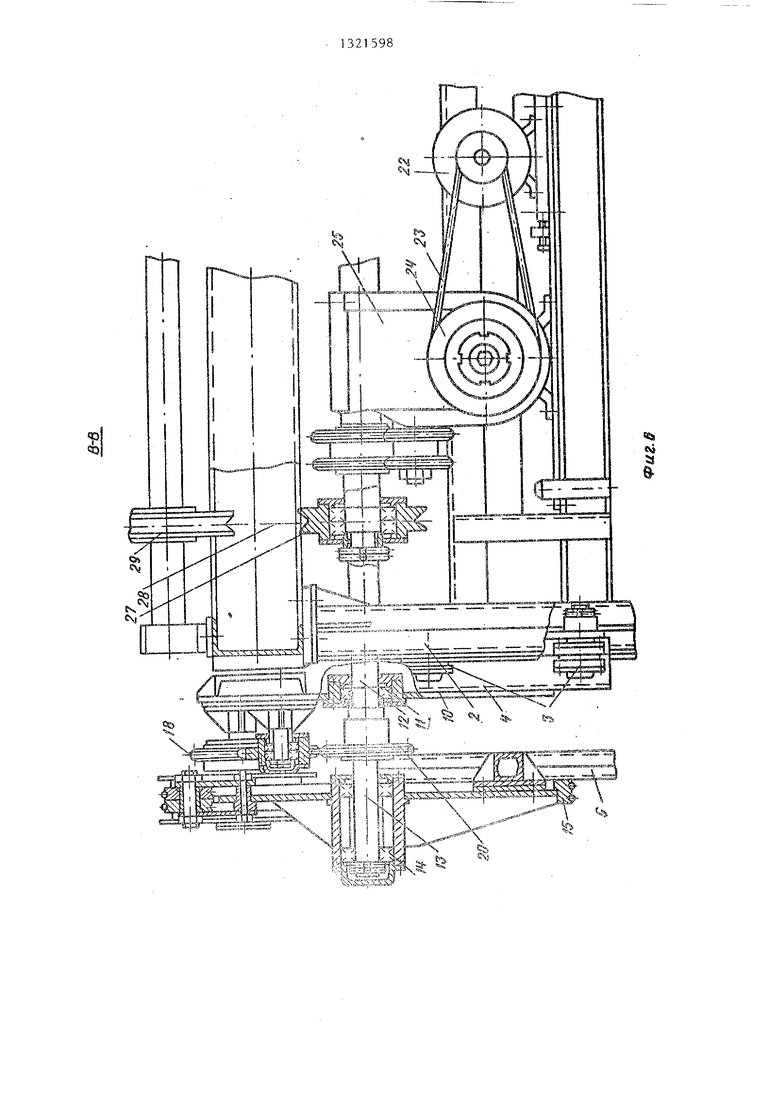
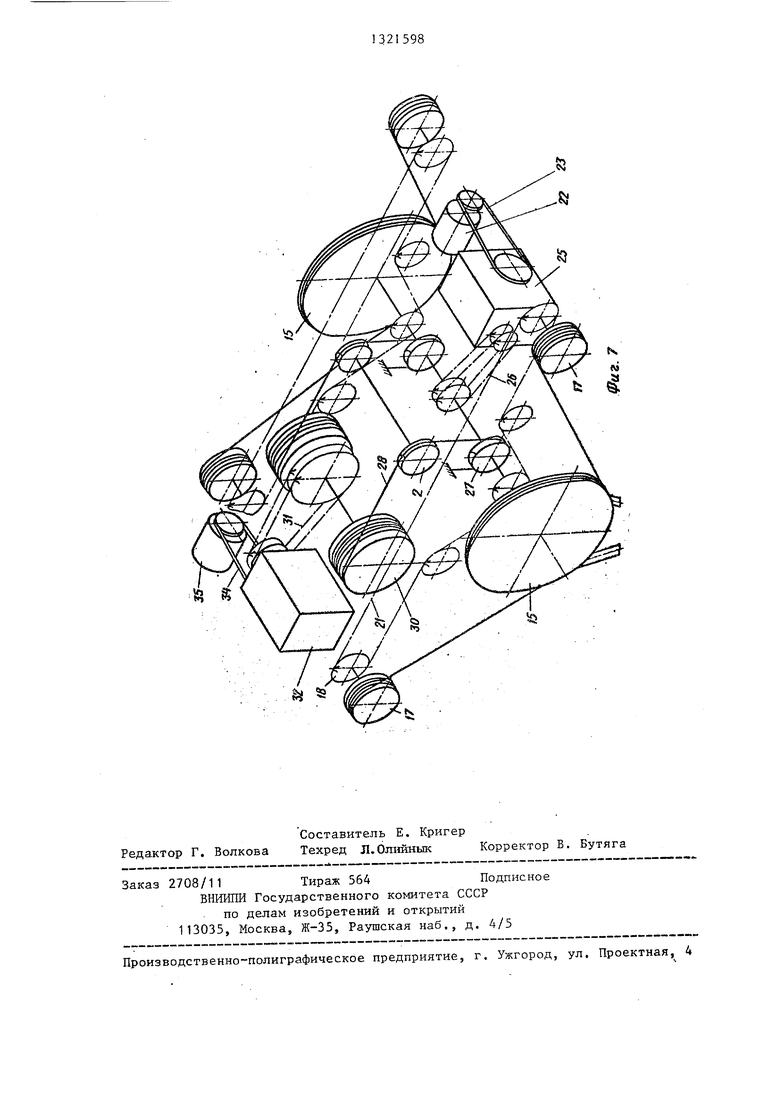
общий вид; на фиг. 2 - то же, вид сверху; на фиг. 3 - патрон в момент захвата покрышки; на фиг. 4 - вид А на фиг. 2; на фиг. 5 - вид Б на фиг. 4; на фиг. 6 - разрез В-В на фиг. 2; на фиг. 7 - кинематическая схема устройства (без привода перемещения тележки).
Устройство содержит подвижную тележку t с вертикальными направляющими 2, на которых посредством роликов 3 установлена подвижная в вертикальном направлении каретка 4 с приводом 5 ее вертикального перемещения привод 6 перемещения тележки 1, патрон 7, шарнирно установленные с возможностью качания в вертикальной плоскости относительно осей 8 на кроштейнах 9. С кареткой 4 жестко связаны щеки 10, в которых выполнены пошипниковые опоры 11 горизонтального вала 12. На консолях 13 вала 12 посредством подшипниковых опор 14 установлены блоки 15, жестко связанные с кронштейнами 9, На щеках 10 смонтированы, направляющие, свободно вращающиеся звездочки 16 и барабаны 17, жестко связанные со звездочками 18. На блоках 15 жестко закреплена гибкая связь в виде троса 19, свободные концы которого жестко закреплены на барабанах 17. Звездочки 16 и 18 и звездочки 20, смонтированные на валу J2, охвачены бесконечными цепями 21. На каретке 4 смонтирован привод барабанов 17,выполненный в виде электродвигателя 22, клиноременной передачи 23, муфты 24 предельного момента, редуктора 25, кинематически связанного с валом 12 посредством цепной передачи 26.
Привод5 вертикального перемещения каретки 4 содержит свободно вращающиеся на валу 12 блоки 27, охваченные гибкой связью в виде троса 28 один конец которого жестко закреплен на тележке, а другой заправлен через отклоняющие блоки 29 и жестко за- -креплен на приводных барабанах 30, кинематически связанных посредством
10
t5
0
5
зо
цепной передачи 31 через редуктор 32, муфту 33 предельного момента и кли- ноременную передачу 34 с злектродви- гателем 35.
Привод 6 перемещения тележки 1 содержит электродвигатель 36, связанный через клиноременную передачу 37, и дополнительно муфту 38 предельного момента с редуктором 39, на выходном валу которого установлен обрезиненный ролик 40. , Электродвигатель 36 и редуктор 39 смонтированы на плите 41, которая установлена с возможностью поворота вокруг оси 42, жестко закрепленной на тележке 1. Необходимое тяговое усилие привода 6 достигается прижатием обрезиненного ролика 40 к ходовой балке 43 пружинами 44.
Патроны 7 выполнены в виде шарнирно смонтированных на основании 45 подпружиненных рычагов 46 с захватами 47 и роликами 48. Аксиально подвижный пространственный копир 49, взаимодействующий с роликами 48, в нижней части имеет подпружиненный упор 50 для взаимодействия с диафраг- менным узлом форматора-вулканизатора, а в верхней части - хвостовик 51, взаимодействующий с системой датчиков 52, управляющих приводом 5 вертикального перемещения каретки 4 и закрепленных на кронштейне 53, жестко связанной с основанием 45. На рыча- 35 гах 46 жестко закреплены упоры 54 с антиадгезионным покрытием 55 для взаимодействия с верхним бортом по- крышки.
На тележке 1 закреплены катки 56 для перемещения по ходовым балкам 43,
Устройство работает следующим образом.
В исходном положении после перемещения тележки 1 приводом 6 к загружаемому форматору-вулканизатору тележка останавливается на позиции загрузки, при этом каретка 4 находится в верхнем положении, патроны 7 находятся над невулканизованными покрышками 57 соосно последним. При этом ролики 48 контактируют с нижними частями копиров 49, находящихся в верхнем положении (фиг.З). Приводом 5 каретка 4 опускается, при этом за счет взаимодействия упоров 54 с верхними бортами покрьш1ек 57 , рычаги 46 поворачиваются освобождая копиры 49, перемещающиеся вниз под
действием собственной тяжести. В нижнем положении копиров 49 за счет взаимодействия роликов 48 с утолщенной верхней частью копиров рычаги 46 фиксируются, при этом захваты 47 заходят под верхний борт покрышек 57, При опускании копиров 49 двух патронов 7 системой датчиков 52 выдается команда на подъем каретки 4, при этом покрышки 57 захваты- ваются патронами 7 за верхние борта.
В верхнем положении каретки 4 выключается привод 5 вертикального перемещения и при включении электродвигателя 22 через клиноременную передачу 23, муфту 24 предельного момента, редуктор 25 и цепную передачу 26 поворачивается вал 12, крутящий момент которого через звездочку 20 посредством цепной передачи 21 передается на барабаны 17.
Таким образом, осуществляется поворот блоков 15 с кронштейнами 9, несущими патроны 7, в положение, при котором последние располагаются со- осно диафрагменным узлам форматора- вулканизатора. В этом положении каретка 4 вновь опускается вниз приводом 5 до взаимодействия подпружиненных упоров 50 с диафрагменными узла- ми 58 форматора-вулканизатора, пространственные копиры 49 перемещаются вверх, рычаги 46 поворачиваются, освобождая лежащие на захватах 47 по- крьш1ки 57, сбрасываемые на диафраг- мы. Одновременно системой датчиков 52 вьщается команда на подъем каретки 4 в верхнее положение и последующий поворот кронштейнов 9 в исходное положение, при котором устройст- во приводом 6 переме;щения тележки 1 перемещается к очередному загружаемому форматору-вулканизатору. Далее цикл повторяется.
Формула изоб ретения
1. Устройство для загрузки невулканизованных покрьш1ек в форматорывулканизаторы, содержащее подвижную вдоль ряда форматоров-вулканизаторов тележку, привод для ее перемещения, смонтированный на тележке посредство кронштейна раздвижной патрон с подпружиненными рычагами и центральным копиром и привод для вертикального перемещения патрона, отличающееся тем, что, с целью автоматизации процесса загрузки покрышек, патрон смонтирован на кронштейне шарнирно с возможностью качания в вертикальной плоскости, а на тележке посредством вертикальных на- правляюш 1х установлена каретка с горизонтальным валом, на консоли которого с юнтирован блок с возможностью вращения относительно вала, причем кронштейн жестко связан с блоком, а последний снабжен приводом поворота, выполненным в виде установленных на каретке симметрично относительно блока приводных барабанов и жестко связанной с блоком гибкой связи, свободные концы которой закреплены на барабанах.
2.Устройство по п. 1, о т л и- чающееся тем, что привод барабанов выполнен в виде жестко связанных с ними звездочек, огибаемых бесконечной цепью, кинематически связанной с установленной на горизонтальном валу звездочкой, и электродвигателя; кинематически связанного с валом через муфту предельного момента.
3.Устройство по п. 1, отличающееся тем, что привод вертикального перемещения .патрона выполнен в виде установленных на валу свободно вращающихся блоков, охваченных гибкой связью, один конец ко торой жестко закреплен на тележке, а другой - на приводных барабанах, кинематически связанных с электродвигателем через дополнительную муфту предельного момента.
э b
5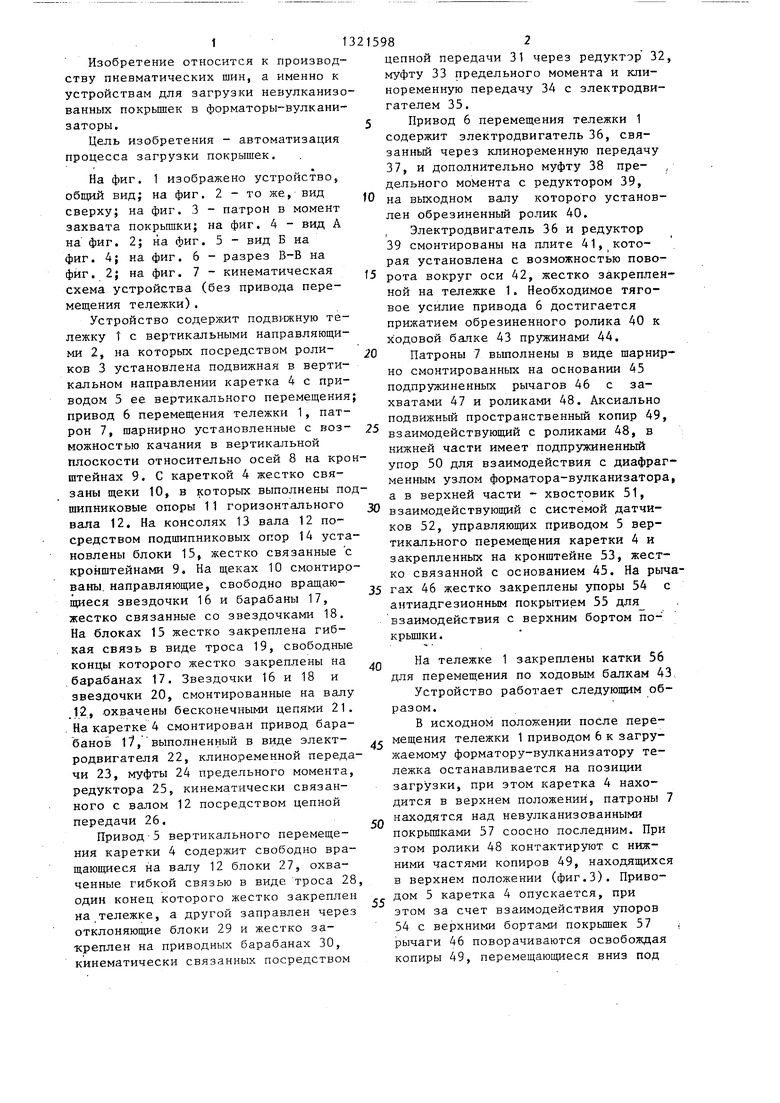
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для загрузки сырых покрышек в форматоры-вулканизаторы | 1973 |
|
SU446170A2 |
| Устройство для загрузки невулканизованных покрышек в форматоры-вулканизаторы | 1984 |
|
SU1224150A1 |
| Линия для формования и вулканизации покрышек | 1985 |
|
SU1310231A1 |
| Устройство для загрузки сырых покрышек в пресс-формы вулканизаторов | 1974 |
|
SU514729A1 |
| Устройство для загрузки заготовок покрышек в пресс-формы вулканизатора | 1982 |
|
SU1087359A1 |
| ЗАГРУЗЧИК СЫРЫХ ПОКРЫШЕК | 1970 |
|
SU267059A1 |
| Форматор-перезарядчик многопозиционного вулканизатора для формования и вулканизации покрышек пневматических шин | 1985 |
|
SU1305045A1 |
| Загрузочное устройство к форматору-вулканизатору | 1967 |
|
SU296379A1 |
| АВТОМАТИЧЕСКАЯ ПОТОЧНАЯ ЛИНИЯ ДЛЯ ФОРМОВАНИЯ И ВУЛКАНИЗАЦИЯ ПОКРЫШЕК | 1969 |
|
SU243817A1 |
| ФОРМАТОР-ВУЛ КАН ИЗАТОР ДЛЯ ПОКРЫШЕК ПНЕВМАТИЧЕСКИХ ШИН | 1973 |
|
SU393819A1 |
Изобретение предназначено для использования в области производства пневматических шин при загрузке невулканизованных покрышек в-форматоры-вулканизаторы. Цель изобретения - автоматизация процесса загрузки покрышек. Для этого патроны смонтированы на кронштейнах шарнирно с возможностью качания в вертикальной плоскости. На тележке посредством вертикальных направляющих установлена каретка с горизонтальным валом, на консоли которого смонтирован блок с возможностью вращения относительно вала. Кронштейн жестко связан с бло- ,ком, а последний снабжен приводом по- :ворота, выполненным в виде установленных на каретке симметрично относительно блока приводных барабанов и жестко связанной с блоком гибкой связи, свободные концы которых закреплены на барабанах. Привод барабанов выполнен в виде жестко связанных с ними звездочек, огибаемых бесконеч- ной цепью, кинематически связанной с установленной на горизонтальном ва- .лу звездочкой, и электродвигателя, - кинематически связанного с валом через муфту предельного момента. Привод вертикального перемещения патронов вьшолнен в виде установленных на валу свободно вращающихся блоков, охваченных гибкой связью, один конец которой жестко закреплен на тележке, а другой - на приводных барабанах, кинематически связанных с электродвигателем через дополнительную муфту предельного момента. 2 з.п. ф-лы, 7 ил. i (Л
« fte 51 &
м
Ni
Sj
N
| Устройство для загрузки сырых покрышек в форматы-вулканизаторы | 1970 |
|
SU358909A1 |
| Солесос | 1922 |
|
SU29A1 |
| Устройство для загрузки невулканизованных покрышек в форматоры-вулканизаторы | 1984 |
|
SU1224150A1 |
| Солесос | 1922 |
|
SU29A1 |
