Изобретение относится к машиностроению, в частности к конструкциям систем управления оборудованием для обработки давлением.
Цель изобретения - повьппение точ- ности работы ковочного механизма путем учета его кинематической жесткости.
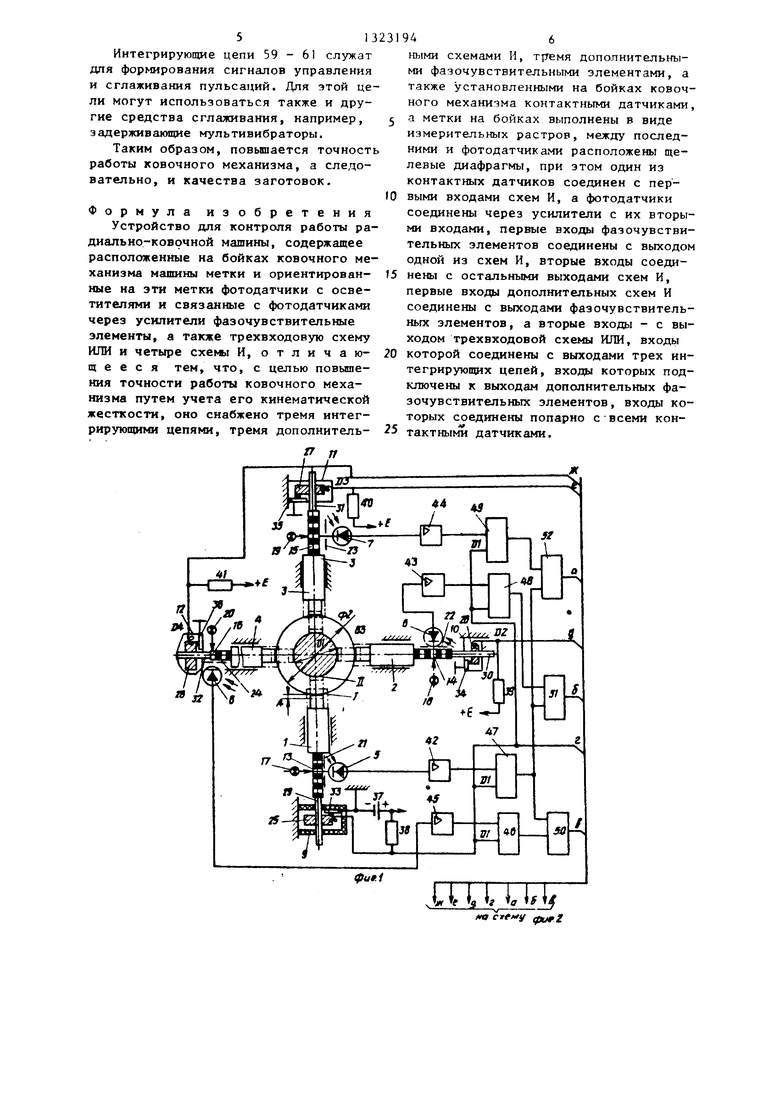
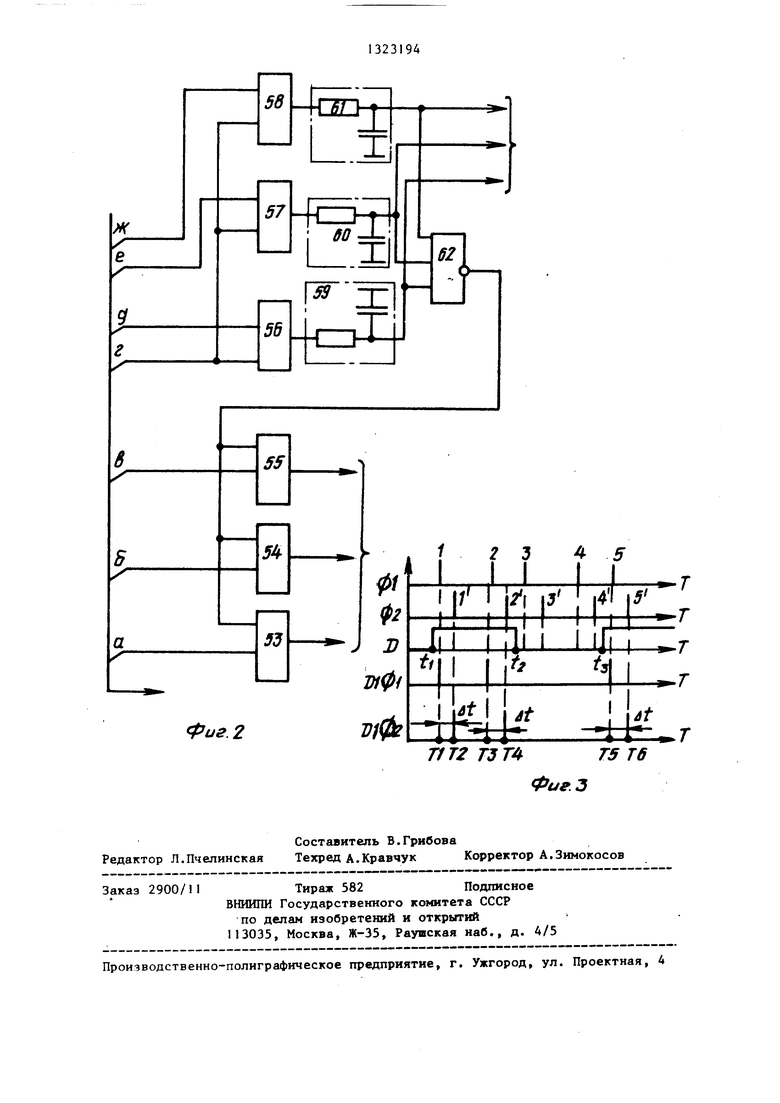
На фиг.1 и 2 приведена конструктивная схема 4-бойкового ковочного механизма и блок-схема устройства контроля; на фиг.З - временные диаграммы работы системы контроля.
Бойки 1 - 4 радиально-ковочной машины (РКМ) снабжены стационарно установленными фотодатчиками 5-8 и контактными датчиками 9 - 12. Каждый из фотодатчиков 5-8 ориентирован на один из измерительных растров 13 - 16, закрепленных каждый на своем бойке, и реагирует на свет, проходящий от источников 17 - 20 света через щель в растре и диафрагмы 21 - 24 с узкой щелью. Контактные датчики 9-12 представляют собой подвижные кoнтa cты 25 - 28, связанные силами трения с штоками 29 - 32, жестко сое дин ёнными с бойками 1-4. Подвижные контакты 25 - 28 периодически входят в контакт с неподвижными контактами 33 - 36, электрически соединенными с корпусом. Контакты 25-28 и 33-36 подключены к источнику 37 питания через нагрузочные резисторы 38 - 41 . Фотодатчики 5-8 через усилители 42 - 45 соединены с первыми входами схем И 46 - 49. Выход схемы И 47 подключен на первые входы трех фазочувстви тельных элементов 50 - 52, на вторые входы которых подключен выход одной из схем И 46 - 49. Выходы фазочувстви тельных элементов 50 - 52 электрическими связями а, б, в соединены с первыми входами дополнительнь х схем И 53 - 55, которые соединены с устройствами сигнализации, индикации и регулирования (не показаны) бойков 2-4 относительно бойка 1, который условно (в данном примере) принят за дающим. Контактные датчики 10 - 12 соединены электрическими связями д, е, ж каждый с первым входом одного из трех дополнительных фазочувстви- тельных элементов 56-58, а контакт ный датчик 9 связью г с вторыми входами Bdex трех указанных элементов. Кроме того, контактный датчик 9 соединен с вторыми входами схем И
46 - 49. Выходы дополнительных фазо- чувствительных элементов 56 - 58 соединены с входами интегрирующих цепей 59 - 61, выходы которых соединены с устройствами сигнализации, индикации и регулирования фазы работы бойков (не показаны). Кроме этого, выходы интегрирующих цепей 59-61 подключены к трехвходой схеме ИЛИ 62, выход которой соединен линией Запрет по фазе со вторыми входами дополнительных схем И 53 - 55.
Устройство работает следующим образом.
В работающей РКМ бойки 1-4 совер- щают возвратно-поступательное движение с амплитудой А (3-6 мм). Непременным условием качественной ковки должна быть одновременность ударов всех бойков по заготовке 63 (иначе заготовка искривляется по длине).
Неодновременность ударов может образоваться в основном по двум причинам: бойки движутся нес инфазно или заготовка расположена не на оси ковки.
Синфазность движения бойков 1 - 4 контролируют контактные датчики 9 - 12, а совпадение оси заготовки 63 с теоретической осью ковки - фотодатчики 5-8. Контактные датчики 9-12 фиксируют подачей сигнала момент начала движения бойка после прохождения мертвой точки,а фотодатчики выдают сигнал, когда источники 17-20 света, определенные щели растров 13 - 16, щели диафрагм 21 - 24 и фотодатчики 5 - 8 в процессе возвратно- поступательного движения бойков 1 - 4 располагаются на одной линии (только в этом случае свет от источника попадает на фотодатчик).
Сигналы фотодатчиков 5-8 поступают на усилители 42 - 45 и далее на первые входы схем И 46-49. Одновременно на вторые входы схем И 46 - 49 поступает сигнал от контактного датчика 9. При этом во время рабочего хода (к детали) поступает отрицательный (нулевой) сигнал, запрещая прохождение сигналов от фотодатчиков 5-8 через схемы 51 -54 (при положительной логике). При возвратном ходе (от детали) на схемы 46-49 поступает положительный сигнал, разре- щая прохождение фотоимпульсов через схемы И 46-49.
313
Допустим, один из бойков, например боек 1, задающий, остальные бойки сравниваются с ним по одновременности сигналов с фотодатчиков на фа- зочувствительных элементах 50 - 52. В то же время сигналы с контактных датчиков 9-12 поступают попарно на дополнительные фаэочувствительные элементы 56 - 58, сравниваясь по фазе с общим опорным сигналом от бой- ка 1 .
Если рассогласований по фазе в работе бойков нет, то на выходах элементов 56 - 58 сигналов нет и схема ШШ 62 разрешает работу схем И 53 - 55, на вторые входы которых поступают сигналы по шинам а, б, в от фазочувствительных элементов 50 - 52. Однако, так как машина снихрони- зирована, сигналы на выходах этих элементов отсутствуют и на входы схем И 53 - 55 не поступают. Поэтому на выходах этих схем также не появляется никаких сигналов. Следовательно бойки I - 4 работают согласованно
Поскольку жесткость кинематических звеньев неодинакова, согласованное состояние может нарушиться. Это может произойти также в результате разведения или сведения бойков I - 4 на ковку другого диаметра. Так, при переходе, например, с диаметра 0 2 на диаметр И 1 за счет погрешностей обработки кинематических звеньев некоторые бойки могут отстать по коор- динате или уйти вперед. В этом случае происходит смещение фактической оси ковочного механизма от теоретической (расчетной). Это же происходит и в случае работы машины под наг рузкой, если ее настройку производил при холостой работе ковочного механизма - без заготовки. При ковке любого диаметра некоторые звенья могут иметь неодинаковые зазоры, т.е. не- одинаковую кинематическую жесткость. Вследствие этого указанные звенья могут отставать или опережать опорное звено. Это также приводит к смещению оси ковки от теоретического положе- ния.
В этом случае вступает в работу В случае рассогласования фазы бой- логическая схема контроля и регулиро-ков на схемы 53 - 55 со схемы 62 пос- влния. тупает запрет, которьй сохраняется
F :cjm, например, боек 3, отстал подо тех пор, пока не происходит подревремени от остальных на некоторуюгулировка фазы по сигналам, вырпбоиелнчииу Т2-Т1, при синфазной работетанным дополнительными фазочувствибойкор происходит следующее.тельными элементами 56-58.
44
При рабочем ходе бойков контакт 25, установленный на штоке 29 бойка I, касается контакта 33. В этом случае на схемы И 46 - 49 поступает отрицательный сигнал, который запрещает прохождение через эти схемы всех сигналов. На временной диаграмме это соответствует положению на временной оси t - tj (сигналы рабочего хода 3, З , 4, 4 подают в отрицательную область). Это происходит до тех пор, пока бойки не изменяют направление своего движения на обратное (от детали) . При этом бойки 1, 2 и 4 начинают движение раньше, чем боек 3, сигнал с фотодатчика 5 задающего бойка I - 0 1 (фиг.З) поступает раньше, чем 0 2 (боек 3) с разницей во времени T2-TI. Так как при обратном ходе бойка 1 происходит отрыв подвижного контакта 25 от контакта 33, то на все схемы И 46 - 49 поступает положительный перепад напряжения с нагрузочного резистора 38, разрешая работу этих схем. Это соответствует на временной оси t, - t . Сигналы с фотодатчика 7 (на временной диаграмме импульсы 1, 2) через схему И 49, а с фотодатчика 5 задающего бойка (на диаграмме импульсы I, 2) проходят через схему И 47 и поступают на фазо- чувствительный элемент 52, выход которого по линии а разрешен через схему И 53 на устройства си,гнализа- ции, индикации и регулирования оси ковочного механизма, сигнализируя о том, что боек 3 отстает и требует подрегулировки. Это происходит в том случае, если фазы бойков совпадают, т.е. на вторых входах схем И 53-55 со схемы ИЛИ 62 дано разрешение на выдачу информации результатов контроля оси ковочного механизма. Таким образом осуществляется контроль по приоритету фазы бойков.
При появлении других рассогласоаний осей ковки процесс происходит аналогично описанному, толькр в раоту вступают соответствующие схемы 47, 48, 54 и 55.
Интегрирующие цепи 59-61 служат для формирования сигналов управления и сглаживания пульсаций. Для этой цели могут использоваться также и другие средства сглаживания, например, задерживающие мультивибраторы.
Таким образом, повышается точность работы ковочного механизма, а следовательно, и качества заготовок.
Формула изобретения
Устройство для контроля работы ра- диально-ковочной машины, содержащее расположенные на бойках ковочного механизма машины метки и ориентированные на эти метки фотодатчики с осветителями и связанные с фотодатчиками через усилители фазочувствительные элементы, а также трехвходовую схему ИЛИ и четыре схемы И, отличающееся тем, что, с целью повышения точности работы ковочного механизма путем учета его кинематической жесткости, оно снабжено тремя интегрирующими цепями, тремя дополнитель
Ш)1ми схемами И, тремя дополнительными фазочувствительными элементами, а также установленными на бойках ковочного механизма контактными датчиками, а метки на бойках выполнены в виде измерительных растров, между последними и фотодатчиками расположены щелевые диафрагмы, при этом один из контактных датчиков соединен с первыми входами схем И, а фотодатчики соединены через усилители с их вторыми входами, первые входы фазочувстви- тельных элементов соединены с вьгходом одной из схем И, вторые входы соединены с остальными выходами схем И, первые входы дополнительных схем И соединены с выходами фазочувствитель- ных элементов, а вторые входы - с выходом трехвходовой схемы ИЛИ, входы которой соединены с выходами трех интегрирующих цепей, входы которых подключены к выходам дополнительных фа- зочувствительных элементов, входы которых соединены попарно свсеми контактными датчиками.
ШПЛ
ftacff ty фиг2
Составитель В.Грибова Редактор Л.Пчелинская Техред А.Кравчук Корректор А.Зимокосов
.., .«.eeeeee ee i ee -
Заказ 2900/11Тираж 582Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
rfT2 rST4T5T6
Фиг.З
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля и управления бойками радиально-ковочной машины | 1985 |
|
SU1276414A1 |
| Радиально-ковочная машина | 1986 |
|
SU1371750A1 |
| Устройство для контроля синхронности перемещения бойков радиально-ковочной машины | 1989 |
|
SU1704897A1 |
| Устройство управления исполнительным механизмом ковочного манипулятора | 1982 |
|
SU1147512A1 |
| Ковочное устройство | 1981 |
|
SU1219218A1 |
| Устройство для управления ковочным молотом и механизмом ориентации поковки | 1979 |
|
SU863123A1 |
| Устройство для управления ковочным комплексом | 1989 |
|
SU1685751A1 |
| Сервопривод клапанов гидрораспределителя гидравлического пресса | 1990 |
|
SU1810223A1 |
| Устройство для измерения статических моментов лопаток турбомашин | 1987 |
|
SU1456795A1 |
| ЧЕТЫРЕХБОЙКОВОЕ КОВОЧНОЕ УСТРОЙСТВО | 2005 |
|
RU2299779C1 |
Изобретение относится к области машиностроения, в частности к конструкциям систем управления оборудованием для обработки давлением. Целью изобретения является повьшение точности работы ковочного механизма путем учета его кинематической жесткости. Для этого используют контактные датчики положения бойков. Это обеспечивает получение информации о наличии и величине сдвига фазы работы бойков . сочетании с измерительными растровыми фотодатчиками возможно вести контроль работы бойков на всех диаметрах ковки. Схема контроля снабжена схемой HJDi, усилителями, дополнительными фазочувствительными элементами и схемами И. Это позволяет определить наличие и величину сдвига оси ковочного механизма относительно теоретической оси ковки. 3 ил. 00 to со со 4;
| Устройство для контроля и управления бойками радиально-ковочной машины | 1985 |
|
SU1276414A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
