Од
vj
сд
Изобретение относится к кузнечно- прессовому оборудованию, а именно к радиально-ковочным машинам (РКМ),
Целью изобретения является повышение точности ковки.
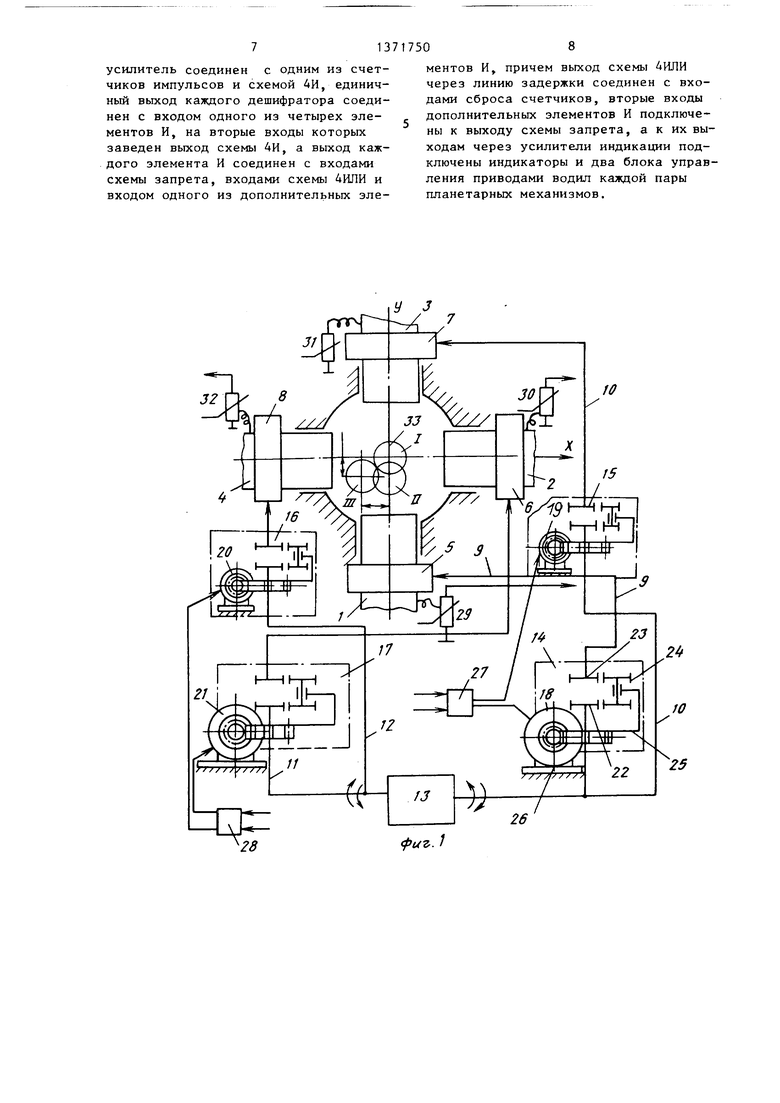
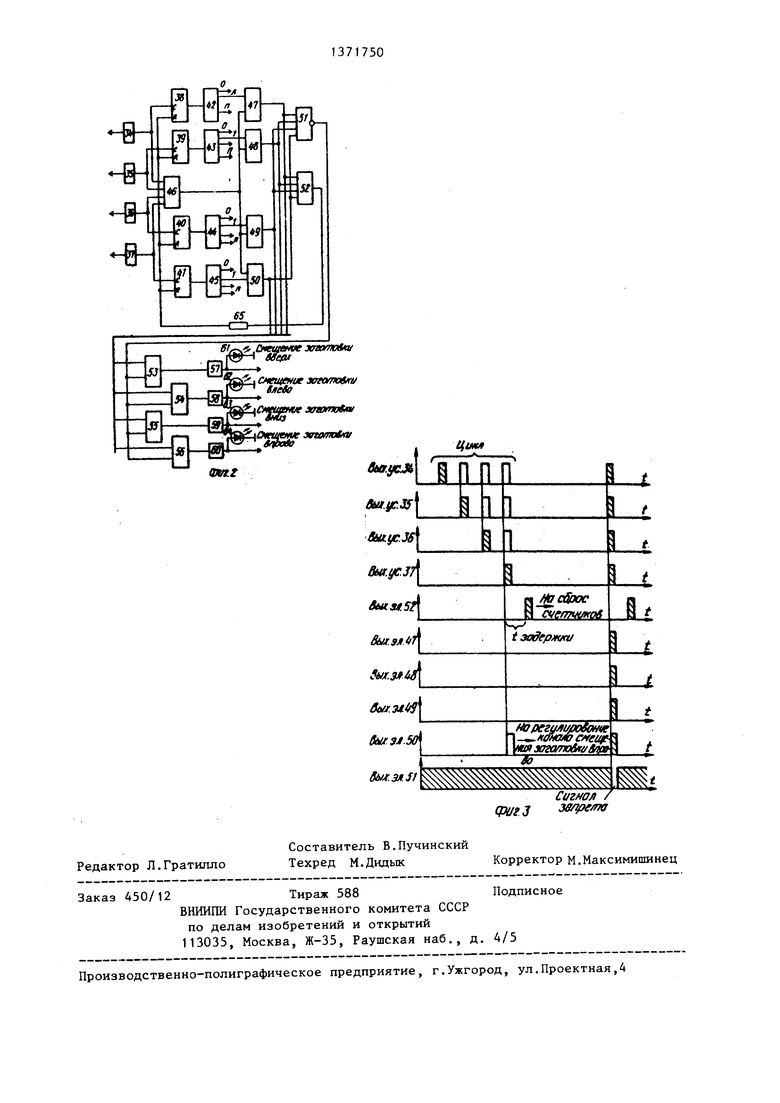
На фиг.1 схематично изображена механическая часть РКМ с исполнительными механизмамиJ на фиг,2 - логическая схема управления; на фиг.З - временные диаграммы работы устройства.
РКМ содержит четьфе радиально расположенных в станине бойка 1-4, связанных с приводом (не показан) их рабочего возвратно-поступательного движения. Каждый из бойков оснащен одним из механизмов 5-8, служащим для регулировочного перемещения данного бойка в процессе его настройки на заданный диаметр обработки. Механизмы 5-8 могут иметь самое различное конструктивное выполнение, например могут быть выполнены в виде червячных передач.
В каждую кинематическую цепь 9-12 соединенными с приводом 13 встроены планетарные механизмы 14-17, снабженные индивидуальными управляемыми приводами 18-21. Центральные колеса 22 и 23 каждого из планетарных механизмов закреплены на соосных валах в разрывах кинематических цепей, а двухвенцовые сателлиты 24 смонтированы на водилах 25, которые червячными передачами 26 связаны с приводами, имеющими блоки 27 и 2В управления,
ГГьезодатчики 29-32 реагируют на удар бойка по обрабатываемой заготовке 33,
Пьезодатчики цепями связи соединены через усилители 34-37 (усилители сигналов датчиков) с четырьмя счетчиками импульсов 38-41, имеющими дешифраторы 42-45, а также со схемой 4И 46. Единичные выходы дешифраторов соединены с первыми входами четырех элементов 2И 47-50, вторые входы которых соединены с выходом схемы 4И 46, Выходы всех элементов 47-50 соединены с входами схемы запрета, выполненной на инвертирующей схеме 4И 51, с входами схемы 4ИЛИ 52, а также с первыми входами четырех дополнительных элементов 2И 53-56, Вторые входы элементов 53-56 подключены к выходу схемы запрета 4И 51, а выходы элементов 53-56 через усилители 5713717502
60 индикации подключены к индикаторам 61-64, выполненным на светосигнальных фотодиодах, и попарно подключ ены к . блокам управления приводами.
Линия 65 задержки соединяет выход схемы 4ИЛИ 52 с входами сброса счетчиков 38-41.
РКМ работает следующим образом.
10 В отлаженном режиме работы обрабатываемая заготовка 33 находится на теоретической оси ковки (положение I) . Возвратно-поступательное (рабочее) движение бойков 1-4 происходит встро15 го синфазном режиме (амплитуда колебаний бойков порядка 3 мм), Бойки обжимают заготовку, нанося одновременно удары по ней с Чг стотой порядка 1000 ударов в 1 мин каждым бойком.
20 При каждом ударе бойков 1-4 по заготовке 33 Пьезодатчики 29-32 вырабатывают электрический сигнал. Сигналы с пьезодатчиков одновременно поступают на усилители 34-37, а после усиления 25 на вход схемы 4И 46 и на входы счетчиков 38-41, дешифрируясь на дешифраторах 42-45, Счетчики 38-41 регистрируют прохождение одного сигнала, который по выходу 1 (единичный выход)
30 дешифраторов 42-45 поступает на первые входы элементов 2И 47-50,
Так как сигналы со всех датчиков 29-32 поступают на схему 4И 46 одновременно, то на ее выходе формируется
ос положительный сигнал, который поступает на вторые входы элементов 2И 47-50 (в данном случае используется схема с положительной логикой). Получив , таким образом, на входы два
40 положительных сигнала, элементы 47-50 выдают сигналы на первые входы элементов 2И 53-56, .а также на схему 4И 51. Последняя вьщает инвертированный сигнал - сигнал запрета - на вторые
45 входы элементов 2И 53-56. Таким образом, на входы элементов 2И 53-56 поступили два разноименных сигнала, в результате чего на выходе этих элементов сигналы не проходят, Индикато, ры 61-64 не загораются, никаких команд блоки 27 и 28 управления не по-, лучают. Это свидетельствует о том, что бойки 1-4 машины касаются детали одновременно: заготовка 33 находится
гг на оси ковки, т,е, РКМ настроена идеально.
Схема 4ИЛИ 52 вырабатывает сигналы, которые, задерживаясь на линии 65 задержки, производят сброс счета
предыдущего такта бойков па счетчиках 38-Д 1 .
Такой процесс продолжается до тех пор, пока не произойдет смещение заготовки 33с оси ковки, например, в положение II. Это может произойти в ре зультате, например, неравномерного нагрева отдельных звеньев кинематических цепей машины, механического смещения оси манипулятора и контрфик сатора, удерживающих заготовку, появ ления в кинематических сопряжениях зазоров и люфтов в результате износа деталей и т.п.
Смещение заготовки 33 на величину лу вызывает неодновременность уда ра бойков по ней. При синхронном рабочем движении всех бойков боек 1 в этом случае нанесет удар первым, за ним последуют два одновременных удара бойков 2 и 4 и последним нанесет удар боек 3. При этом датчик 29 среагирует выдачей сигналов не только на удар своего бойка 1, но и на отставшие по времени удары трех остальных бойков, так как эхо их ударов пе- редается по металлу заготовки 33. В данном случае датчик 29-вырабатывает последовательность из трех импульсов от удара бойка 1, затем от одновременного удара бойков 2 и 4 и, наконец от удара бойка 3. Датчики 30 и 32 вьщадут по два импульса: один - от слившегося удара бойков 2 и 4, второй - от удара бойка 3. На удар бойка 1 датчики 30 и 32 не среагируют, так как их бойки 2 и 4 не контактировали еще с заготовкой в момент удара бойка 1.
Датчик 31 вьщает от удара наиболее запоздавшего бойка 3 один сигнал (на предыдущие удары других бойков он не среагирует).
После усиления счетчик 38 зафиксирует и передаст на дешифратор 42 три импульса (от ударов бойков 1-2,4-3), счетчики 39 и 41 передадут на дешифраторы 43 и 45 по два импульса (от ударо в бойков 2,4 и 3), а счетчик 40 на дешифратор 44. - один импульс (от удара бойка 3). Так как в дешифраторах 42-45 задействованы только выходы 1 (единичные), то на первые входы каждого из элементов 2И 47-50 проходит только один импульс - -) 1 - от удара только своего бойка. Причем на элемент 49 импульс поступит поз10
15
20
25
30
35
40
45
50
55
же всех остальных элементов 47,48 и 50.
Вместе с тем эхо от удара последнего бойка 3 зарегистрировали все четыре датчика 1-4. Поэтому в момент удара бойка 3 на схему 4И 46 одновременно поступят четыре сигнала и она выдаст на выходе сигнал 1, который поступит на вторые входы всех элементов 2И 47-50. Но к этому времени на первых входах элементов 47,48 и 50 импульс уже пропал, поэтому они останутся закрытыми. И только на входы элемента 2И 49 импульсы от дешифратора 44 (от датчика 31) и от схемы 46 пришли одновременно. В результате этого схема 46 открылась и пропустила сигнал на первый вход элемента 2И 55. На второй вход элемента 55 также пришел положительный сигнал со схемы 4И 51, как результат инверсии отрицательного сигнала, который выработала схема 51 вследствие того, что на входы этой схемы пришли разноименные сигналы.
Вследствие того, что на элемент 55 прииши два положительных сигнала, этот (только этот) элемент открывается и усиленный усилителем 59 сигнал включает индикатор 63 и поступает на блок 31 управления. Загоревшийся индикатор 63 оповещает о том, что боек 3 отстал по моменту удара от бойков 1,2 и 4 и его необходимо приблизить к заготовке. Для этого блок 31 управления выдает команду на включение приводов 18 и 19, которые червячными передачами 26 проводят во вращательное движение водила 25 планетарных механизмов 14 и 15.
Сателлиты 24 обоих механизмов обкатываются по центральным зубчатым колесам 22 и 23.
Так как зубчатые венцы сателлитов 24 имеют разницу в 1-3 зуба, а колеса 22 неподвижны относительно колеса 23, то в процессе обкатки колеса 23 начнут медленное вращение, которое по кинематическим цепям 9 и 10 передается на механизмы 5 и 7 регулировочного перемещения бойков 1 и 3, из которых механизм 7 сближает боек 3 с заготовкой 33, находящейся в положении II, а механизм 5 соответственно удаляет боек 1 от заготовки. При этом оба бойка 5 и 7 перемешаются с одинаковой скоростью, не меняя расстояния между рабочими торцами.
513
Такое движение бойков 1 и 3 продолжается до тех пор, пока их удары не сравняются по времени с ударами бойков 2 и 4, т.е. восстановится исходное положение, когда все четыре бойка наносят удары одновременно.
В момент совпадения ударов всех бойков схема 46 выдаст на выходе сигнал +1, которым откроются все четыре элемента 2И 47-50, и на схему 51 поступят четыре положительных сигнала, которые после инверсии сформируют на ее выходе сигнал запрета (отрицательный сигнал) . Этот сигнал поступит на вторые входы дополнительных элементов 2И 53-56, которые сигнал далее не пропустят. Индикатор 63 погаснет, а блок 24-управления выключи приводы 18 и 19.
В случае, если заготовка 33 смещается из положения I в положение III сразу по двум координатам на величину JX и лу, причем JX7 , первым нанесет удар на боек 4, вторым - бое 1, третьим - боек 3 и последним - боек 2. Соответственно датчик 32 выдает серию из четырех сигналов, датчик 29 - из трех сигналов, датчик 31 - из двух и последний датчик 30 - один сигнал. Этот последний сигнал пройдет на индикатор 62, включив его и заготовка смещена влево на блок 28 управления, который включит приводы 20 и 21. В результате этого боек 2 приближается к находящейся в положении III заготовке 33, а боек 4 соответственно отводится от заготовки до тех пор, пока бойки 2 и 4 не станут наносить удары одновременно. Теперь отстающим станет боек 3. Загорается индикатор 63 и далее все происходит аналогично описанному при смещении заготовки 33 в положение II.
В конечном итоге, все четыре бойка приводятся к положению, при котором они наносят удары по заготовке одновременно, несмотря на отклонение ее положения от первоначального как по всей координате, так и по двум.
Таким образом, электронная система РКМ постоянно контролирует одновременность ударов всех бойков по заготовке и с помощью исполнительньк- механизмов автоматически вводит коррекцию при малейшем временном рассогласовании ударов.
Если в результате корректирующих манипуляций бойками (или по другим
06
причинам) изменяется заданное расстояние между бойками, то вступает в действие привод 13 сведения-разведения бойков, приводящий в действие
механизмы 5-8 независимо от их работы от приводов 18-21.
Временные диаграммы (фиг.З) отражают последовательность входных сигналов логической схемы при рассогласовании оси ковки. При этом заштрихованные сигналы представляют сигналы пьезодатчиков соответствующих бойков, а незаштрихованные - сигналы Эхо от последующих по времени бойков
(эхо запаздывающих бойков). Там же показан сигнал сброса.
На диаграмме предст авлен один цикл работы бойков при рассогласованной системе. При полной синхронности диаграмма выглядит так, как показано во второй ее части.
В следящей системе предлагаемой РКМ достигается селективный отбор последнего сигнала - проходит только
сигнал от удара наиболее запоздавшего бойка, все предыдущие сигналы-данного такта подавляются. Вследствие этого система реагирует на малейшее отклонение от одновременности ударов
всех бойков и автоматически вводит коррекцию.
В результате этого ось заготовки практически постоянно находится на равном расстоянии от всех четырех
бойков, т.е. на оси ковки ковочного механизма. Это новое свойство предлагаемой РКМ обеспечивает высокую точность обработанных на ней изделий .
Формула изобретения
Радиально-ковочная машина, содержащая четьфе бойка с механизмами регулировочного перемещения, датчики момента удара бойков, усилители сигналов датчиков, четыре элемента И, схему запрета, четьфе усилителя индикации и индикаторы, о т л и ч а ю щ а я с я тем, что, с целью повышения точности ковки, она снабжена четьфьмя планетарными механизмами, водила которых подключены к управляемым приводам, четырьмя счетчиками
импульсов с дешифраторами, схемой 4И, схемой 4ИЛИ, четьфьмя дополнительными элементами И и линией задержки, при этом каждый датчик через
7137
усилитель соединен с одним из счетчиков импульсов и схемой АИ, единичный выход каждого дешифратора соединен с входом одного из четырех элементов И, на вторые входы которых заведен выход схемы 4И, а выход каждого элемента И соединен с входами схемы запрета, входами схемы 4ИЛИ и входом одного из дополнительных эле7508
ментов И, причем выход схемы 4ИЛИ через линию задержки соединен с входами сброса счетчиков, вторые входы дополнительнЕ 1х элементов И подключены к выходу схемы запрета, а к их выходам через усилители индикации подключены индикаторы и два блока управления приводами водил каждой пары планетарных механизмов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля и управления бойками радиально-ковочной машины | 1985 |
|
SU1276414A1 |
| Устройство для контроля работы радиально-ковочной машины | 1986 |
|
SU1323194A1 |
| ИЗБИРАТЕЛЬНОЕ УСТРОЙСТВО ИДЕНТИФИКАЦИИ ВЫЗОВА ОТ АБОНЕНТА | 1998 |
|
RU2136050C1 |
| Устройство для управления шаговым двигателем | 1988 |
|
SU1527703A1 |
| Устройство для программного управления | 1983 |
|
SU1160367A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВЫХ КООРДИНАТ МЕСТА ВЫСТРЕЛА ИЗ ОГНЕСТРЕЛЬНОГО ОРУЖИЯ | 2007 |
|
RU2366888C2 |
| Система автоматического управления транспортным потоком многокомпонентной смеси в трубопроводной установке | 1986 |
|
SU1373656A1 |
| Электромагнитный привод ударного действия | 1990 |
|
SU1745920A1 |
| Устройство для ретрансляции речевых сигналов | 1990 |
|
SU1830627A1 |
| Устройство для пневмотранспортирования сырьевых материалов | 1985 |
|
SU1346542A1 |
Изобретение относится к кузнеч- но-прессовому оборудованию, а именно к радиально-ковочным машинам (РКМХ Целью изобретения является повышение точности ковки. Для достижения цели четьфе бойка РКМ связаны с пьезодат- чиками, реагирующими на удар бойка по заготовке. В случае рассогласования ударов бойков по времени электронная логическая система РКМ осуществляет селекцию сигнала от удара последнего бойка в данном такте. По выделенному сигналу включается электромеханическая система регулировки. Эта система, перемещая отставший и оппозитно расположенный ему бойки в одном направлении, восстанавливает одновременность удара всех бойков. 3 ил.
У J
10
2«
W
26
фиг,.
| Устройство для контроля и управления бойками радиально-ковочной машины | 1985 |
|
SU1276414A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
