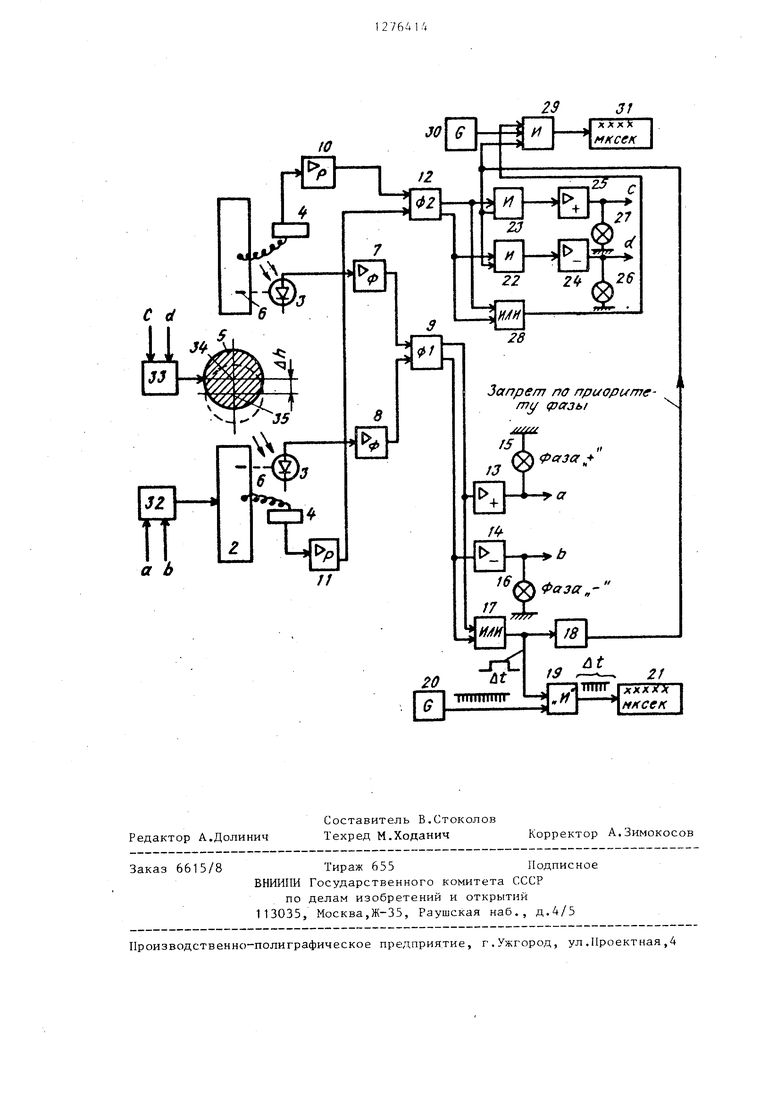
1 Изобретение OTIUJCHTCH к MaiuHHoстроению, в частности к системам ;.Ч1равления оборудование м для обрабо::- ки давлением. Целью изобретения является иов: 1шение точности и качества ковки за счет исключения рассогласования хода бойков и смещений в положении заготовки относительно оси ковки. На чертеже приведена функциональная схема устройства применительнсз к управлению одной пары бойков 1 и 2. В устройство входят фотодатчикл 3 Положения бойков и датчики 4 момента удара бойка по заготовке 5. Датчики 3 вьтолнены -в виде фотодатчиков, а датчики 4 в виде пьезода-чиков. Фотодатчики 3 и пьезодатчики 4 установлены на корпусе маи1ины н€:п средственно у своего бойка, причем каждый фотодатчик 3 реагирует на ме ку 6, нанесенную на боек. Пьезодатчики установлены на корпусе, а не на самом бойке, поскольку при большой скорости возвратно-постулятельных ходов бойка развиваются значительные инерщюнные силы, отрицательно действуюиц-ie на устройство . Эт датчики реагируют на акустическую волну удара бойка, передаваемую на датчик по звукопроводу (металтшческоиу проводнику). Фотодатчики 3 положения бойков I и 2 (и каждой другой пары бойков) через преобразовате ли 7 и 8 электрически соединены с первым фазочувствительным элементом 9 сравнения, а пьезодатчики 4 момента удара бойков 1 и 2 через преобра.зователи 10 и 11 соединены со вторым фазочувствительным элементом 12 срав нения. Выходы первого фазочувствител ного элемента 9 через первый и втор усилители 13 и 14 подключены к индикатору фазового рассогласования бойков 1 и 2, выполненному в виде двух индикаторных ламп 15 и 16,, из которых лампа 15 предназначена для сигнализации о смещении фазы в плюс,а лампа 16 - в минус. Через первый эл мент ИЛИ 17 выходы первого фазочувт ствительного элемента 9 подключены также ко входу схемы 18 запрета и на вход первого элемента И 19, ко второму входу которого подключен первьп генератор 20 импульсов. Выход элемента И 19 соединен-с первым блоком 21 информации (о величине сдвига од 4-2 ого бойка относительно другого по азе). Выходы BTcjpoio фазочувствительноо элемента 12 через второй 22 и треий 23-элементы И и через третий и етвертый усилители 24 и 25 подклюены к индикатору рассогласования ойков 1 и 2 по моменту удара, таке выполненному в виде индикаторных амп 26 и 27, из которых лампа 26 редназначена для сигнализации смеения заготовки 5 с оси ковки в наравлении бойка 2, а лампа 27 - в аправлении к бойку 1. Через второй элемент ИЛИ 28 выходы Bioporo фазочувствительного элемента 12 подключены на вход четвертого элемента И 29, ко второму входу которого подключен второй генератор импульсов 30. Выход четвертого элемента И 29 соединен с блоком 31 информации о величине рассогласования бойков 1 и 2 по моменту удара их по заготовке, т.е. о величине смещения заготовки 5 с оси ковки. Выход схемы 18 запрета соединен с вторым 22, третьим 23 и четвертым 29 элементами И. Если в маиине используется автоматическая регулировка работы бойков, то фазочувстззительные элементы 9 и 12 пара.алельно с индикаторами (15, 16 и 26, 27) соединены с исполнительными механизмами 32 и 33. Исполнительный механизм 32 по существу является приводом и предназначен для совмещения фазы движения бойка 2 с фазой движения бойка 1, последний в данной паре бойков принимается за эталонный. Механизм 33 служит для устранегшя смещения заготовки 5 относительно оси ковки 34. Коррекция производится либо перемещением в радиальном направлении манипулятора, удерживающего заготовку, либо перемещением всего ковочного механизма машины. Устройство работает следующим образом. При работе радиально-ковочной машины контроль движения бойков 1 и 2 (а также других пар бойков) осуществляется с помощью фотодатчиков 3, которые регистрируют в определенный момент времени положение бойков 1, 2 относительно оси ковки 34 машины, а контроль положения заготовки 5 от312
носительно оси ковки ЗА осуществляется с помощью пьезодатчиков 4, которые регистрируют момент удара бойка, реагируя на акустическую волну удара
Фотодатчики 3 реагируют на метки 6, которые наносятся на бойках при юстировке машины. Для этого на оси ковки 34 устанавливается круглая в сечении оправка, бойки сводятся до касания с ней и на равных расстояниях от их рабочих торцов наносятся светоотражательные метки. Фотодатчики 3 устанавливаются против меток.
При возвратно-поступательном движении бойков метки 6 периодически попадают в узкую зону работы фотодатчиков 3, которые реагируют на это выдачей электрического сигнала.
Сигналы с датчиков 3 и 4 преобразуются в короткие импульсы и усиливаются преобразователями 7, 8 и 10, 11 и далее поступают с обоих фотодатчиков 3 на фазочувствительный элемент 9, а с обоих пьезодатчиков 4 - на фазочувствительный элемент 12.
Если бойки 1 и 2 движутся без рассогласования и заготовка 5 расположена на оси ковки 34, сигналы от датчиков 3 и 4 обоих бойков приходят соответственна на фазочувствительные элементы 9 и 12 попарно одновременно, никакой корректировки в этом случае не требуется, поэтому сигналы рассогласования фаз на выходе фазочувствительных элементов 9 и 12 не появляются.
С появлением рассогласования фазы если, например, боек 2 отстал по фазе от бойка 1 на величину &t ,а ось 35 заготовки 5 сместилась с оси ковки 34 на величину дЬ, фотодатчики 3 зафиксируют неодновременность прохода меток 6, а пьезодатчики 4 зафиксируют неодновременнбсть ударов бойков 1 и 2 по заготовке 5.
В этом случае сигналы с фотодатчиков 3 поступают на фазочувствительный элемент 9 не одновременно, а с временным интервалом ut. Точно так же сигналы с пьезодатчиков 4 поступают на фазочувствительный элемент 12 с временным интервалом, пропорциональным дЬ. На выходах фазочувствительньпс элементов 9 и. 12 появляются сигналы рассогласования,
В зависимости от направленности смещения фазы в плюс или минус сиг144
нал рассогласования фазочувствительного элемента 9, усиленньп усилителем 13 или 14, поступает на индикаторную лампу 15 фаза + или лампу
-. Загорание соответствующей лампы свидетельствует о том, что появилось рассогласование движения бойков по фазе и указывает в каком направлении произошел сдвиг - в плюс или в минус.
Параллельно с этим сигнал рассоглсования с фазочувствительного элемента 9 поступает через элемент ИЛИ
17на элемент И 19 и на схему 18 запрета. На второй вход элемента И 19 непрерывной серией подаются импульсы с генератора 20. Элемен т И 19 из этих импульсов формирует пачки импульсов, продолжительность которых пропорциональна интервалу ut. Пачки импульсов поступают на блок 21 информации, где электронно-счетное устройство высвечивает на табло величину рассогласования фазы движения бойков, т.е. показывает на сколько микросекунд раньше (или позже) пересекла метка 6 одного бойка, чем такая
же метка другого бойка, зоны действия своих фотодатчиков. I
Таким образом,- по загоранию индикаторной лампы 15 и 16 и используя показания табло блока 21, можно произвести корректировку фазы работы бойков машины вручную, используя имеющиеся для этого механизмы.
Сигнал рассогласования момента удара с выхода фазочувствительного элемента 12 поступает на элементы И 22 и 23, а также через элемент ИЛИ 28 - на элемент И 29. На вторые входы элементов И 22, 23 и 29 поступает сигнал запрета с выхода схемы 18. Сигнал запрета обеспечивает приоритет рассогласования бойков по фазе движения перед рассогласованием их по моменту удара - пока бойки 1,2 не будут согласованы по фазе, элементы И 22, 23 и 29 не пропускают сигнал с фазочувствительного элемента 12.
После того как бойки 1 и 2 начнут работать синфазно, поступление сигнала рассогласования от фазочув;ствительного элемента 9 на схему 18 прекращается, на выходе последней установится разрешающий сигнал, в результате чего элементы И 22, 23 и 29 отпираются для прохождения сигнала рассогласования по моменту удара с фазочувствительного элемента 12„В этом случае сигнал рассогласовани г поступает по одной из двух линий через усилитель 24 и 25 на одну из индикаторных ламп 26 (ось вверх) кпн 27 (ось вниз) в зависимости от направления смещения заготовки 5. (На черетеже изображен случай смещения заготовки 5 на величину йЬ в направлении бойка 2.Смещенное положение за готовки показано штриховой линией, ее ось обозначена позицией 35). После прихода на элемент И 29 раз решающего сигнала со схемы 18 элемен И 29 разрешает прохождение,импульсов генератора 30, формируемых в виде па чек, пропорциональных по продолжител ности величине дЬ. Пачки импульсов поступают на блок 31 выдачи информации рассогласования по моменту удара, который высвечивает на табло чис ло микросекунд, на которые один боек (в рассматриваемом примере боек 1) ударяется по заготовке позже другого бойка (бойка 2). По полученным данным произврдитс.я известными средствами коррекция положения Заготовки 5 так, чтобы ее ос 35 совпадала с осью ковки 34. При использовании автоматической регулировки сигналы с фазочувствительных элементов 9 и 12 параллельно с индикаторными лампами 15., 16 и 26, 27 поступают соответственно на исполнительный механизм 32 регулирования фазы, который связан с бойками и механизм 33 регулирования оси, свя занньй с элементами фиксации заготов ки 5. Таким образом, обеспечивается постоянный контроль и регулирование по ложения по фазе бойков и оси ковки. Основное преимущество предлагаемого уст-ройства заключается в том, что ис ключается возможность работы с рассогласованными бойками, когда один боек ударяет по заготовке раньше дру гого как по причине рассогласования бойков по фазе движения, так и по причине смещения. заготовки с оси ков ки машины. Одновременные удары бойков (протилежащих) исключают искривление затовки, что являлось причиной бра, так как о необходимости коррекровки машины судили по появлению акованных непрямолинейных изделий. Эффективность использования устойства достигается повьшшнием каества и точности ковки. Формула изобретения Устройство .для контроля и управления бойками -радиально-ковочной машины, содержащее исполнительные механизмы перемещения бойков и заготовки, датчики положения бойков с преобразователями сигналов этих датчиков, связанные с элементами сравнения, отличающееся тем, что, с целью повышения точности и качества ковки за счет исключения рассогласования хода бойков и смещений заготовки, оно снабжено датчиками момента удара бойков с преобразоваталя1-1И сигналов этих датчиков, двумя генераторами импульсов, четьфьмя элементами И, двумя элементами ИЛИ, а четырьмя усилителями с индикаторными лампаг4и, схемой запрета и двумя блоками информации, входы которых соединены соответственно с выходами первого и четвертого элементов. И, а, входы исполнительных механизмов перемещения бойков и заготовки подключены к выходам соответ- ствую1цих усилителей, причем входы первого элемента И соединены с выходами первого генератора и первого элемента ИЛИ, входы которого связаны с выходами первого элемента сравнения, которые подключены также к входам первого и второго усилителей,при этом выходы второго элемента сравнения соединены с входами второго элемента ИЛИ, второго и третьего элемента И, вьксоды последних подключены к входам соответственно третьего и четвертого усилителей, а входы четвертого элемента И соединены соответственно с выходом второго генератора импульсов, с выходом второго элемента ИЛИ и с выходомсхемы запрета, вход которой подключен к выходупервого элемента ИЛИ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля работы радиально-ковочной машины | 1986 |
|
SU1323194A1 |
| Радиально-ковочная машина | 1986 |
|
SU1371750A1 |
| Ковочное устройство | 1981 |
|
SU1219218A1 |
| Устройство для контроля синхронности перемещения бойков радиально-ковочной машины | 1989 |
|
SU1704897A1 |
| Следящий привод для компенсации ки-НЕМАТичЕСКиХ пОгРЕшНОСТЕй МЕХАНизМОВ | 1979 |
|
SU817959A1 |
| Блок-схема управления гидравлическими прессами | 1976 |
|
SU737244A1 |
| Устройство для позиционирования бойка гидравлического пресса | 1983 |
|
SU1123889A1 |
| Преобразователь перемещения в код | 1988 |
|
SU1654973A1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ТОРМОЗНЫМ КРЮКОМ И ДВИГАТЕЛЕМ ПРИ ПОСАДКЕ ЛЕТАТЕЛЬНОГО АППАРАТА НА ПАЛУБУ КОРАБЛЯ | 1996 |
|
RU2119440C1 |
| Электромагнитный привод ударного действия | 1990 |
|
SU1745920A1 |
Изобретение относится к машиностроению, в частности к системам управления оборудованием для обработки давлением. Изобретение позволяет повысить точность и качество ковки путем исключения рассогласования хода бойков и смещений в положении заготовки относительно оси ковки. Осуществляется непрерывньй контроль перемещения бойков, момента удара их по заготовке, для чего используются специальные датчики каждого бойка. Сигналы соответствующих датчиков через преобразователи сигналов поступают на фазочувствительные элементы сравнения, на выходах которых появляются сигналы с учетом знака рассогласования. 1 ил.
| Устройство для корректировки положения инструмента радиальнообжимной машины | 1978 |
|
SU706172A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
