Изобретение относится к машиностроению и может быть использоЕ1ано для автоматизации основных и вспомогательных операций.
Целью изобретения является повышение производительности за счет увеличения числа обслуживаемых позиций бе увеличения числа аккумуляторов,
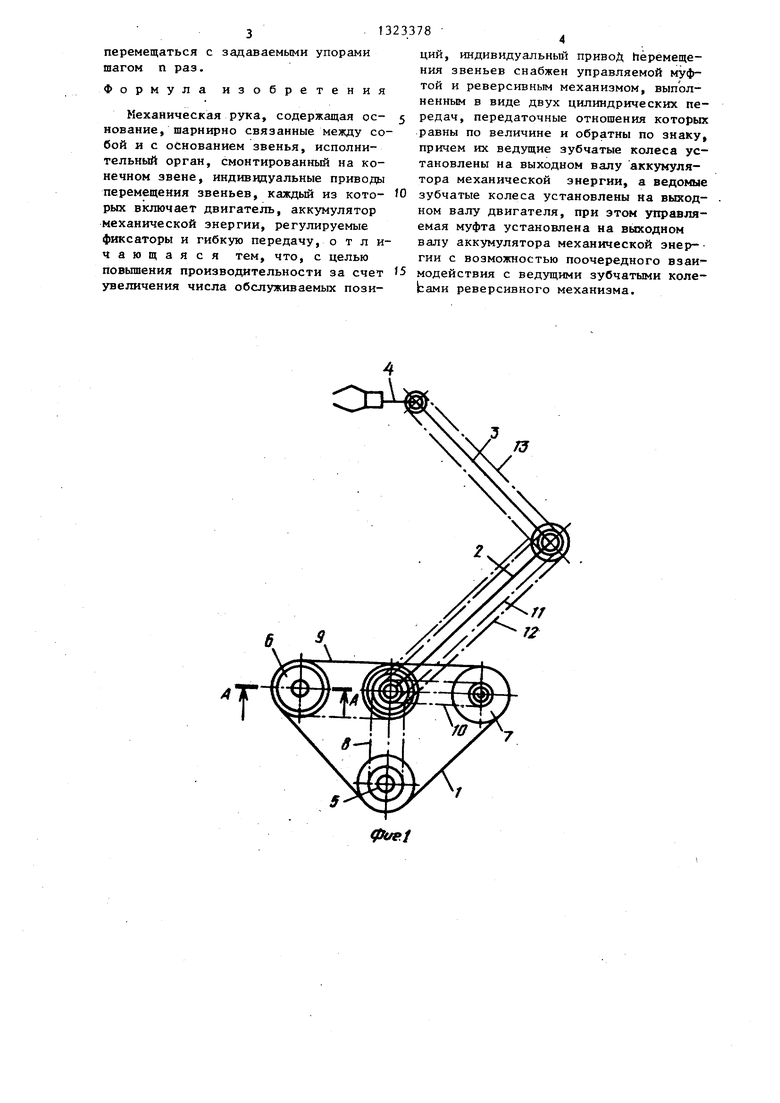
На фиг.1 изображена кинемати:ческа схема механической руки; на фиг.2 - кинематическая схема индивидуального привода.
Механи шская рука {фиг.1) состоит из основания 1, шарнирно связанных между собой и с основанием 1 звеньев 2, 3 и 4, последнее из которьпс несет исполнительный орган, а индивидуальные приводы перемещения этих звеньев 5, 6 и 7 связаны со звеньями 2, 3 и 4 кинематическими цепями 8, 9, 10, t1, 12 и 13 в виде, например, зубчатых приводных ремней.
Индивидуальный привод (фиг.2) представляет собой корпус 14 с выходным шкивом 15, устанавливаемьй на Ссноаание 1. В корпусе установлен пружинный аккумулятор механической энергии 16 с управляемыми регулируемыми фиксаторами 17 и 18. На выход35
ном валу 19 аккумулятора 16 механиче- аккумулятора 16 механической энергии ской энергии установлена управляемая вращение передается через управляемую
муфту 20 сцепления, ведущее зубчатое колесо 21 и ведомое зубчатое колесо 23 реверсивного механизма на выходной шкив 15 индивидуального привода. Ведущее зубчатое колесо 22 реверсивного механизма свободно вращается на вы- ходном валу 19 в противоположную сторону относительно последнего. Когда аккумулятор 16 механической энергии достигнет нейтрального положения, силы инерции системы закручивают пружи ны аккумулятора 16 механической энергии, переводя его в другое крайнее низма связано с ведомым зубчатым ко- положение.до защелкивания фиксатора лесом 24 через промежуточное зубчатое 18. При этом происходит остановка выходного шкива 15 и выключение двигамуфта 20 сцепления.
Реверсивный механизм выполнен в ввде двух цилиндрических передач, передаточные отношения которых равны по величине и обратны по знаку. Ведущие зубчатые колеса 21 и 22 этих передач установлены на выходном Всшу 19 аккумулятора 16 механической энергии, а ведомые зубчатые колеса 23 и 24 установлены на выходном валу двигателя 25, причем ведущее зубчатое колесо 22 одной из цилиндрическргх зубчатых передач реверсивного меха40
колесо 26, чем обеспечивается обратный знак передаточного отношения; относительно предьщущей ци.пиндрической пары. Управляемая муфта 20 сцепления установлена на выходном валу 19 аккумулятора 16 механической энергии с возможностью поочередного соединения с ведущими зубчатыми колесами 21 и 22 реверсивного механизма.
.Механическая рука работает следующим образом.
Каждое звено механической руки снабжено индивидуальным приводом пе50
55
теля 25.
Для того-чтобы продолжить движение на следзгтощйй шаг в том же направлении, необходшчо выключить муфту 20 сцепления, т.е. подсоединить к выходному валу 19 аккумулятора 16 механической энергии ведущее зубчатое колесо 22 реверсивного механизма и передача момента.на выходной шкив 15 происходит по кинематической цепи 19-20-22-26-24-15. Из вышеизложенного следует, что выходной шкив 15 может ,.
ремеи;ения, позволяюп1;им перемещать звено в нужное положение.
В исходном положении пружина аккумулятора 16 механической энергии взведена и удерживается фиксатором 17 в крайнем положении. Управляемая муфта 20 сцепления выключена и подсоединяет ведущее зубчатое колесо 22 реверсивного механизма к выходному валу 19 аккумулятора 16 механической энергии, двигатель 25 выключен.
При получении команды на перемещение в прямом направлении на п шагов (опишем работу системы при п 2)
включается управляемая муфта 20 сцепления, подсоединяя выходной вал 19 аккумулятора 16 механической энергии к ведущему зубчатому колесу 21 реверсивного механизма, срабатывает фиксатор 17, освобождая пружину аккумулятора 16 механической энергии и включается двигатель 25 в прямом направлении. Происходит разгон выходного шкива 15 в прямом направлении пру5 жиной аккумулятора 16 механической энергии и двигателем 25, который поставляет в систему энергию, равную энергии потерь в кинематических парах. При этом от выходного вала 19
0
50
55
теля 25.
Для того-чтобы продолжить движение на следзгтощйй шаг в том же направлении, необходшчо выключить муфту 20 сцепления, т.е. подсоединить к выходному валу 19 аккумулятора 16 механической энергии ведущее зубчатое колесо 22 реверсивного механизма и передача момента.на выходной шкив 15 происходит по кинематической цепи 19-20-22-26-24-15. Из вышеизложенного следует, что выходной шкив 15 может ,.
перемещаться с задаваемыми упорами
шагом п раз.
Формула изобретения
Механическая рука, содержащая ос- нование, шарнирно связанные между собой и с основанием звенья, исполнительный орган, смонтированный на конечном звене, индивидуальные приводы перемещения звеньев, каждый из которых включает двигатель, аккумулятор механической энергии, регулируемые фиксаторы и гибкую передачу, отличающаяся тем, что, с целью повышения производительности за счет увеличения числа обслуживаемых пози
ций, индивидуальный привоД Перемещения звеньев снабжен управляемой муфтой и реверсивным механизмом, выполненным в виде двух цилиндрических передач, передаточные отношения которых равны по величине и обратны по знаку, причем их ведущие зубчатые колеса установлены на выходном валу аккумулятора механической энергии, а ведомые зубчатые колеса установлены на выходном валу двигателя, при этом управляемая муфта установлена на выходном валу аккумулятора механической энергии с возможностью поочередного взаи- модействия с ведущими зубчатыми коле- Ьами реверсивного механизма.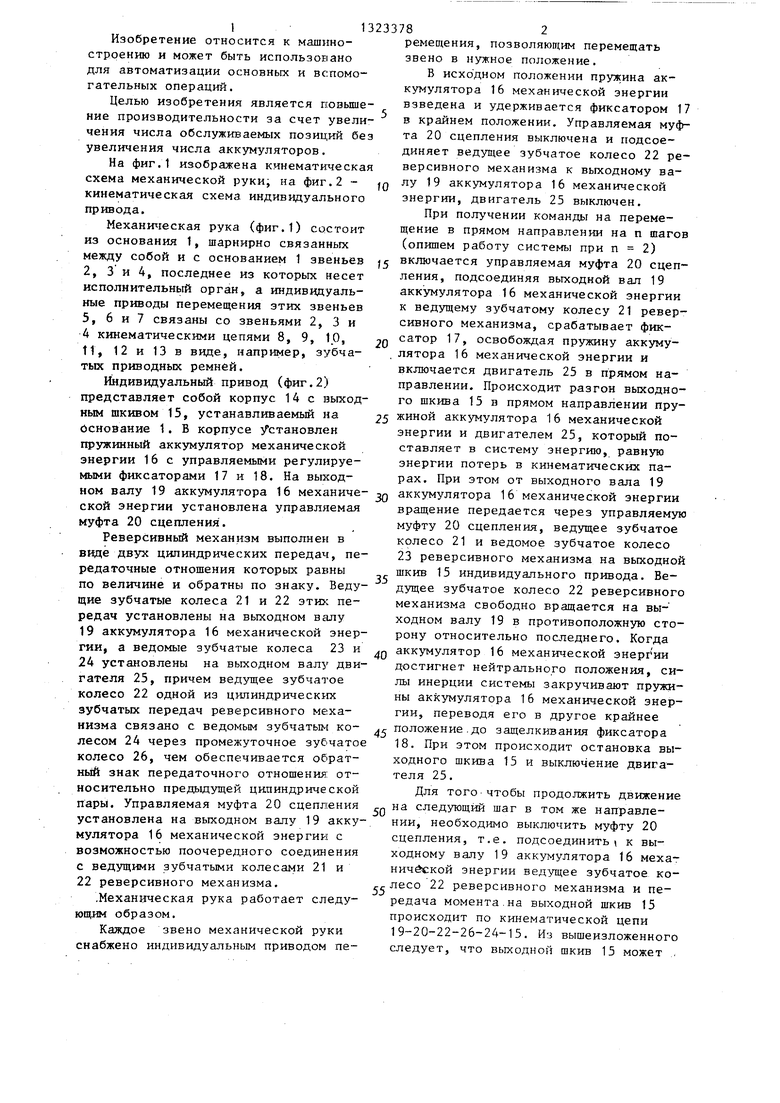
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО РЕКУПЕРАЦИИ ЭНЕРГИИ ТОРМОЖЕНИЯ | 2011 |
|
RU2453749C1 |
| МАШИНА | 2009 |
|
RU2401762C1 |
| Манипулятор | 1986 |
|
SU1364467A1 |
| Модуль робота | 1990 |
|
SU1722809A1 |
| РЕКУПЕРАТИВНАЯ МЕХАНИЧЕСКАЯ САМОРЕГУЛИРУЕМАЯ БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА С МАХОВИЧНЫМ НАКОПИТЕЛЕМ ЭНЕРГИИ | 2004 |
|
RU2261385C1 |
| Малогабаритный трактор | 1990 |
|
SU1785922A1 |
| Бесступенчатый привод транспортного средства | 2020 |
|
RU2737407C1 |
| ИНЕРЦИОННЫЙ МЕХАНИЧЕСКИЙ ПРУЖИННЫЙ ДВИГАТЕЛЬ С ЭЛЕКТРИЧЕСКИМ УПРАВЛЕНИЕМ ДЛЯ ПОЛУЧЕНИЯ ЭНЕРГИИ | 1999 |
|
RU2151323C1 |
| Манипулятор | 1988 |
|
SU1548034A1 |
| Бесступенчатая силовая передача для транспортных средств | 1989 |
|
SU1733279A1 |
Изобретение относится к области машиностроения и может быть использовано для автоматизации основных и вспомогательных операций. Целью изобретения является повышение производительности за счет увеличения числа точек позиционирования без увеличения числа аккумуляторов механической энергии. Для этого в индивидуальном приводе звена имеется управляемая муфта сцепления и реверсивный механизм в виде двух цилиндрических зуб- ч атых передач с равными по величине, но противоположными по знаку передаточными отношениями. Передача движения в прямом направлении осуществляется включением управляемой муфты сцепления 20, соединяющей выходной вал 19- аккумулятора механической энергии 16 с ведущим зубчатым колесом 21 реверсивного механизма, а передача движения в обратном направлении осуществляется при выключенной управляемой муфте сцепления 20, связывайщей выходной вал 19 аккумулятора механической энергии 16 с ведущим зубчатым колесом 22 реверсивного механизма. 2 ил. СО tS5 СлЭ 4j 00
Л7
0t/e.t
uz.Z
Редактор А.Долинич
Составитель А.Ширяева Техред Л. Олийнык
Заказ 2915/20Тир;1ж 953Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
КорректорА. Зимокосоь
| Механическая рука | 1982 |
|
SU1110623A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
