сл
Ј
оо
о оо 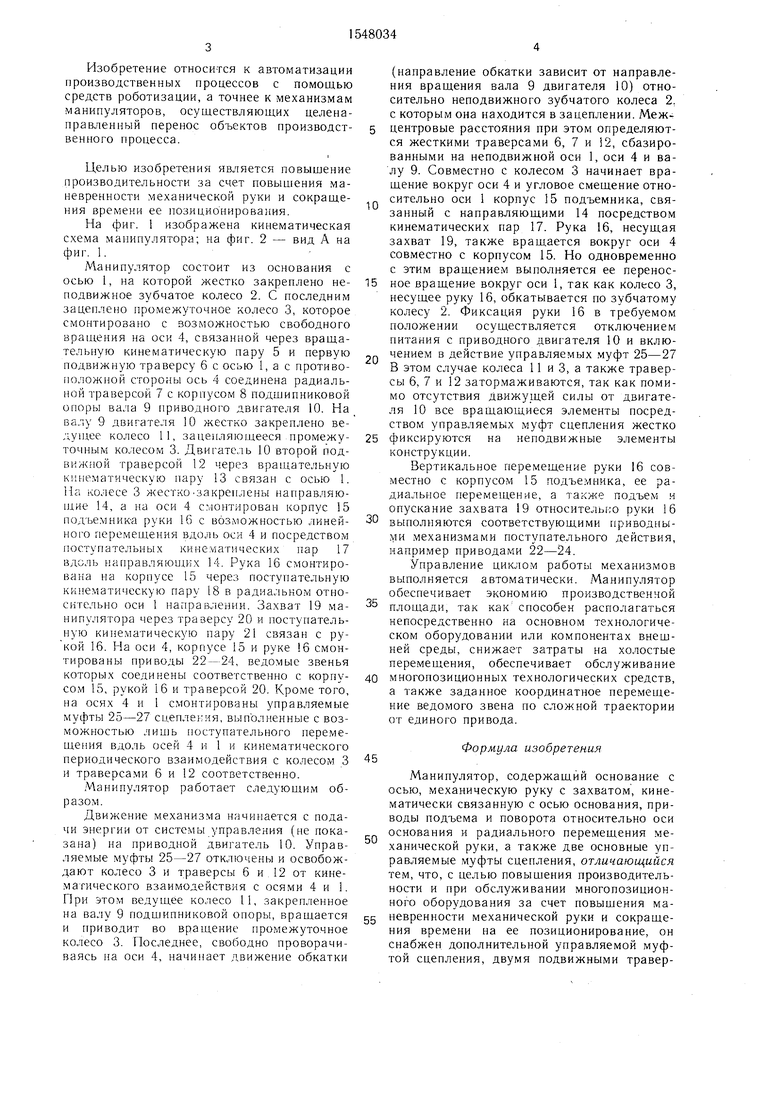
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1985 |
|
SU1321577A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |
| Манипулятор | 1986 |
|
SU1364467A1 |
| Манипулятор | 1985 |
|
SU1284821A1 |
| Манипулятор агрегатного типа | 1985 |
|
SU1293014A1 |
| Манипулятор А.И. полетучего | 1985 |
|
SU1247262A1 |
| Привод рабочего органа манипулятора | 1987 |
|
SU1491696A1 |
| Манипулятор | 1989 |
|
SU1660953A1 |
| Промышленный робот | 1985 |
|
SU1310198A1 |
| Манипулятор | 1983 |
|
SU1199610A1 |

Изобретение относится к автоматизации производственных процессов с помощью средств роботизации, а точнее к механизмам манипуляторов, осуществляющих целенаправленный перенос объектов производственного процесса. Целью изобретения является повышение производительности за счет повышения маневренности механической руки и сокращения времени ее позиционирования. При вращении ведущего колеса 11 от привода 10 осуществляется обкат этого колеса относительно промежуточного колеса 3 и неподвижного колеса 2. Само промежуточное колесо 3 поворачивается относительно оси 4 траверсы 6 и оси 1 основания. Механическая рука 16 при этом совершает перенос движения и описывает в пространстве эпициклоиду. При заданном положениии руки 16 с захватом 19 включаются управляемые муфты сцепления 25 - 27, которые фиксируют подвижные элементы конструкции. 2 ил.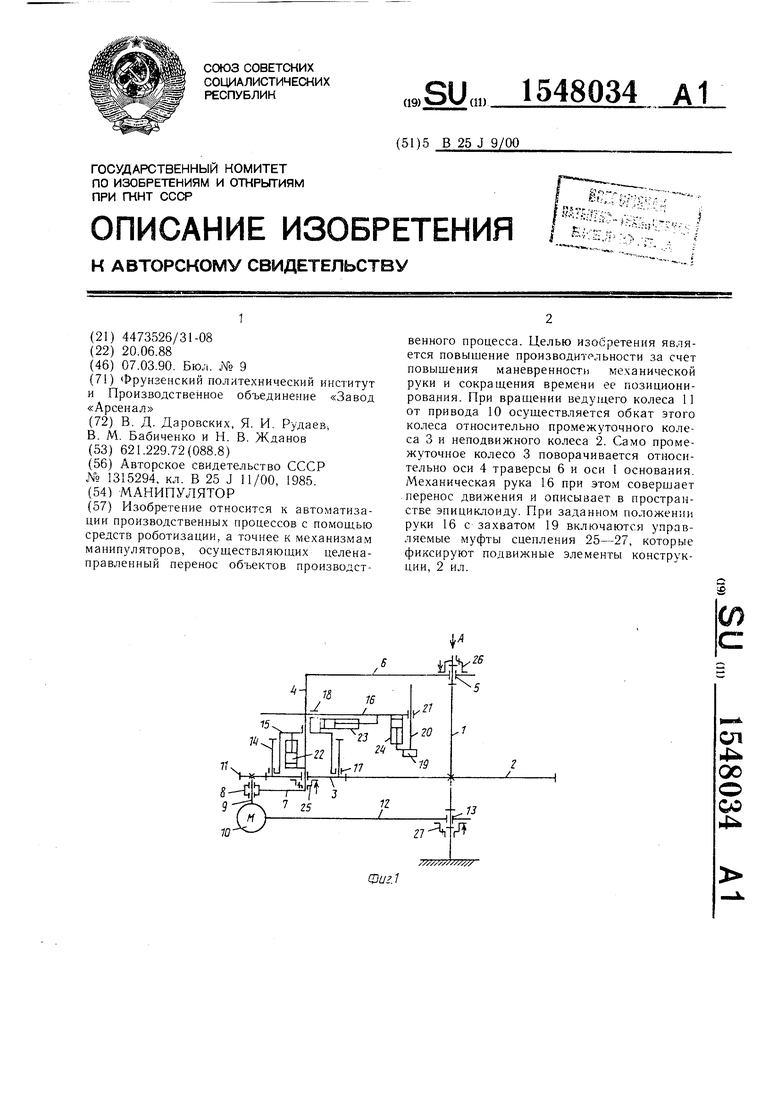
Фиг
Изобретение относится к автоматизации производственных процессов с помощью средств роботизации, а точнее к механизмам манипуляторов, осуществляющих целенаправленный перенос объектов производственного процесса.
Целью изобретения является повышение производительности за счет повышения маневренности механической руки и сокращения времени ее позиционирования.
На фиг. изображена кинематическая схема манипулятора; на фиг. 2 - вид А на фиг. 1.
Манипулятор состоит из основания с осью 1, на которой жестко закреплено неподвижное зубчатое колесо 2. С последним зацеплено промежуточное колесо 3, которое смонтировано с возможностью свободного вращения на оси 4, связанной через вращательную кинематическую пару 5 и первую подвижную траверсу 6 с осью 1, а с противоположной стороны ось 4 соединена радиальной траверсой 7 с корпусом 8 подшипниковой опоры вала 9 приводного двигателя 10. На валу 9 двигателя 10 жестко закреплено ведущее колесо 11, зацепляющееся промежуточным колесом 3. Двигатель 10 второй подвижной траверсой 12 через вращательную кинематическою пару 13 связан с осью 1. Па аолесе 3 жестко Закреплены направляющие 14, а на оси 4 смонтирован корпус 15 подъемник-а руки 16 с возможностью линейного перемещения вдоль оси 4 и посредством поступательных кинематических пар 17 вдоль направляющих 14. Рука 16 смонтирована на корпусе 15 через поступательную кинематическую пару 18 в радиальном относительно оси 1 направлении. Захват 19 манипулятора через траверсу 20 и поступательную кинематическую пару 21 связан с ру- кой 16. На оси 4, корпусе 15 и руке 6 смонтированы приводы 22 - 24, ведомые звенья которых соединены соответственно с корпусом 15, рукой 16 и траверсой 20. Кроме того, на осях 4 и 1 смонтированы управляемые муфты 25-27 сцеплекия, выполненные с возможностью лишь поступательного перемещения вдоль осей 4 и 1 и кинематического периодического взаимодействия с колесом 3 и траверсами 6 и 12 соответственно.
Манипулятор работает следующим образом.
Движение механизма начинается с подачи энергии от системы управления (не показана) на приводной двигатель 10. Управляемые муфты 25-27 отключены и освобождают колесо 3 и траверсы 6 и 12 от кинематического взаимодействия с осями 4 и 1. При этом ведущее колесо 11, закрепленное на валу 9 подшипниковой опоры, вращается и приводит во вращение промежуточное колесо 3. Последнее, свободно проворачиваясь на оси 4, начинает движение обкатки
0
5
0
5
0
5
0
5
0
5
(направление обкатки зависит от направления вращения вала 9 двигателя 10) относительно неподвижного зубчатого колеса 2. с которым она находится в зацеплении. Межцентровые расстояния при этом определяются жесткими траверсами 6, 7 и 12, сбазиро- ванными на неподвижной оси 1, оси 4 и валу 9. Совместно с колесом 3 начинает вращение вокруг оси 4 и угловое смещение относительно оси 1 корпус 15 подъемника, связанный с направляющими 14 посредством кинематических пар 17. Рука 16, несущая захват 19, также вращается вокруг оси 4 совместно с корпусом 15. Но одновременно с этим вращением выполняется ее переносное вращение вокруг оси 1, так как колесо 3, несущее руку 16, обкатывается по зубчатому колесу 2. Фиксация руки 16 в требуемом положении осуществляется отключением питания с приводного двигателя 10 и включением в действие управляемых муфт 25-27 В этом случае колеса 11 и 3, а также траверсы 6, 7 и 12 затормаживаются, так как помимо отсутствия движущей силы от двигателя 10 все вращающиеся элементы посредством управляемых муфт сцепления жестко фиксируются на неподвижные элементы конструкции.
Вертикальное перемещение руки 16 совместно с корпусом 15 подъемника, ее радиальное перемещение, а также подъем и опускание захвата 19 относительно руки 16 выполняются соответствующими приводными механизмами поступательного действия, например приводами 22-24.
Управление циклом работы механизмов выполняется автоматически. Манипулятор обеспечивает экономию производственной площади, так как способен располагаться непосредственно на основном технологическом оборудовании или компонентах внешней среды, снижает затраты на холостые перемещения, обеспечивает обслуживание многопозиционных технологических средств, а также заданное координатное перемещение ведомого звена по сложной траектории от единого привода.
Формула изобретения
Манипулятор, содержащий основание с осью, механическую руку с захватом, кинематически связанную с осью основания, приводы подъема и поворота относительно оси основания и радиального перемещения механической руки, а также две основные управляемые муфты сцепления, отличающийся тем, что, с целью повышения производительности и при обслуживании многопозиционного оборудования за счет повышения маневренности механической руки и сокращения времени на ее позиционирование, он снабжен дополнительной управляемой муфтой сцепления, двумя подвижными траверсами и зубчатой передачей, имеющей ведущее, промежуточное и неподвижное зубчатое колеса, при этом ведущее колесо шар- нирно связано с первой траверсой и жестко связано с приводом поворота руки, который жестко связан С второй траверсой, и это ведущее колесо кинематически связано с неподвижным зубчатым колесом этой передачи которое установлено на оси основания через промежуточное зубчатое колесо, которое
установлено подвижно на первой траверсе и кинематически связано с ней при помощи дополнительной управляемой муфты сцепления, причем механическая рука с приводами ее радиального и вертикального перемещений кинематически связана с промежуточным зубчатым колесом передачи, а подвижные траверсы кинематически связаны.с осью основания посредством соответствующих основных управляемых муфт сцепления.
2
Щи г.г
| Манипулятор | 1985 |
|
SU1315294A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
