Изобретение относится к ма1пиностроению, а именно к манипуляторостроению, и предназначено для усовершенствования механических рук автоматических манинуляторов, используемых для автоматизации основных и вспомогательных операций.
Известна механическая рука автоматического манипулятора, содержащая основание, шарнирно соединенные звенья, индивидуальные приводы каждого звена, приводные кинематические цепи и аккумуляторы механической энергии, выполненные в виде упругих элементов и программно-управляемых упоров-фиксаторов с механизмом их выдвижения 1.
Недостатком известного устройства является наличие самостоятельных приводов для управления выдвижением упоровфиксаторов, что усложняет устройство, повышает энергоемкость и снижает надежность работы устройства.
Целью изобретения является повышение надежности и упрощение конструкции путем выдвижения программно-управляемых упоров-фиксаторов соответствуюп 1,его аккумулятора механической энергии индивидуальным приводом звена.
Цель достигается тем, что в механической руке автоматического манипулятора, содержащей основание, шарнирно соединенные звенья, индивидуальные приводы каждого звена, приводные кинематические цепи и аккумуляторы механической энергии, выполненные в виде упругих элементов и программно-управляемых упоров-фиксаторов с механизмом их выдвижения, выходные элементы индивидуального привода и аккумулятора механической энергии установлены друг относительно друга с зазором и с возможностью относительного перемещения в пределах этого зазора, при это.м механизм выдвижения упоров-фиксаторов выполнен в виде кулачка, закрепленного на выходном элементе индивидуального привода, и толкателя, закрепленного на упоре-фиксаторе.
На чертеже представлен вариант кинематической схемы механической руки.
Рука представляет собой плоскую uein шарнирно соединенных с основанием 1 и между собой звеньев 2-4 и содержит приводные кине.матические цепи 5-7,. выполненные в виде гибких звеньев, напри.мер тросов, индивидуальные приводы 8-10 звеньев.
2-4 соответственно, на выходных валах которых закреплены кулачки, в виде ролика 1 1 и штанги 12, на которой с возможностью регулирования установлена вилка 13, аккумуляторы механической энергии, например, в виде пружин 14, регулируемые упоры-фиксаторы 15 и 16, которые крепятся к направляющей 17 с помощью болтов 18 и 19. Пружина 14 концами прикреплена к фиксаторам 15 и 16, а средней точкой - к выходному элементу 20 аккумуляторов механической энергии. Для удобства монтажа пружина 14 может быть выполнена составной, в виде двух идентичных последовательно соединенных упругих элементов.
Механическая рука автоматического манипулятора работает следующим образом.
Пусть Б исходном состоянии рука находится на упоре 15. При вращении вала привода и соответственно штанги 12 по ча0 совой стрелке с упором 15 сначала контактирует ролик 11, тем самым он снимает с упора 15 выходной элемент 20 аккумулятора механической энергии, который начинает и продолжает двигаться по часовой стрелке под действием пружины 14 пока «не сядет на упор 16. При обратном движении все повторяется аналогичным образом.
Если исходная скорость вращения вала двигателя в несколько раз больше скорости вращения выходного элемента 20 аккумуля0 торов механической энергии, то штанга 12 при вращении в любую сторону всегда опережает его. Радиальное положение вилки 13 на щтанге 12 определяет угловой зазор между элементом 20 аккумулятора механической энергии. Оно должно быть выбрано 5 таким, чтобы в крайних положениях ролик 11 не нарущал нормального взаимодействия выходного .элемента 20 и упоров 15 или 16.
Кроме того, упоры-фиксдторы должны быть связаны с конечными выключателями (не показаны) и отключать двигатель, когда выходной элемент 20 аккумуляторов механической энергии «сел на упор 16 (15).
При таком конструктивном рещении механической руки отггадает необходимость в 5 дополнительных программно-управляемых приводах упоров-фиксаторов, тем самым упрощается конструкция и повышается надежность автоматического манипулятора.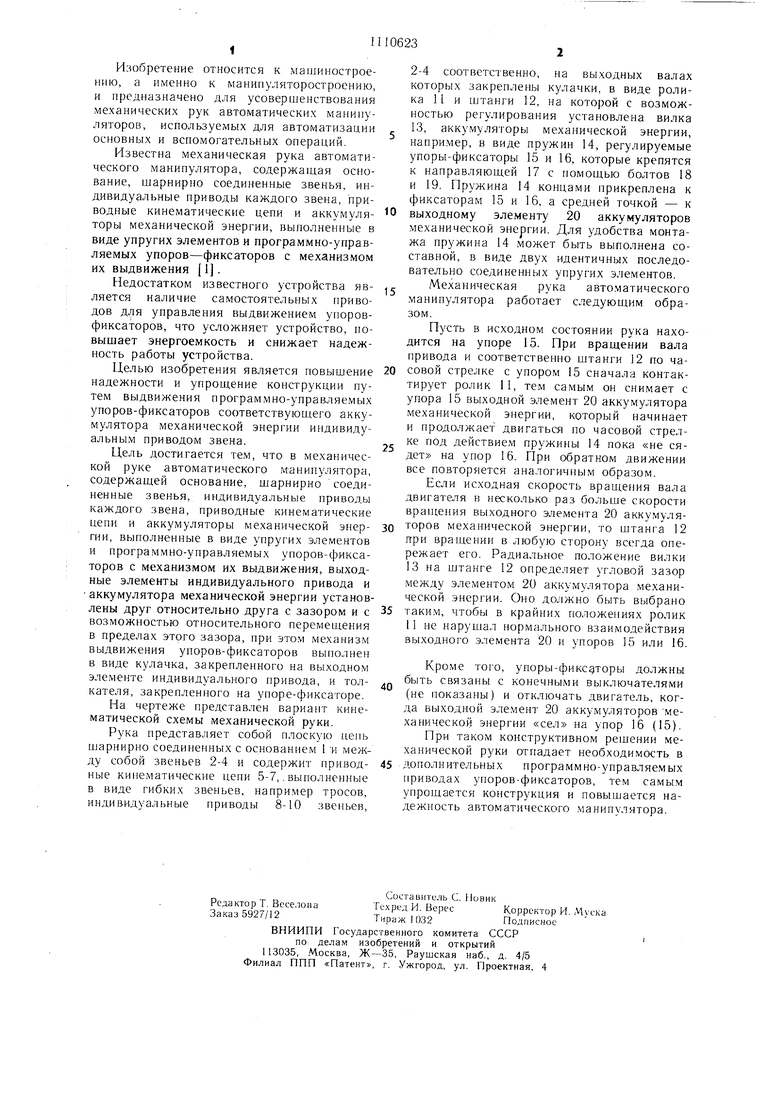
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический манипулятор с цикловым управлением | 1983 |
|
SU1151449A2 |
| Манипулятор с цикловым управлением | 1983 |
|
SU1110624A2 |
| Манипулятор с программным управлением | 1978 |
|
SU733975A1 |
| Манипулятор Николаева | 1985 |
|
SU1296397A1 |
| Промышленный робот | 1988 |
|
SU1713797A1 |
| Промышленный робот | 1988 |
|
SU1537509A1 |
| Механическая рука | 1986 |
|
SU1323378A1 |
| Манипулятор с цикловым управлением | 1978 |
|
SU738865A1 |
| Автоматический манипулятор | 1981 |
|
SU963846A1 |
| Модуль промышленного робота | 1990 |
|
SU1715578A1 |
МНХАНИЧ1-СК.АЯ РУКА авто.мати чес кого манипч.чятора, содержащая основание, нарнири) соединенные звенья, индивидуальные приводы каждого звена, нриводные кинематические иенн и аккумх-ляторы ме.хаиичеекои --якфгии, выполненные в виде |;рд-:л -.c ieiiroB и нро1раммиоvTipaiiisieM;)-; ч(.р(
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Механическая рука | 1975 |
|
SU568346A3 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Сплав для отливки колец для сальниковых набивок | 1922 |
|
SU1975A1 |
