Изобретение относится к устройствам для етроительетва, ремонта и текущего содержания железнодорожного нути, в частности к системам унрав;1ения за1 луб,;1ением рабочего с))гана нодбнвочных .
Цель изобретения - повышение качества унлотнения балласта под Н1иалами при работе нодбивочных машин иутем обеспечения возможности регулирования велнчи- ны заглубления ниалоиодбивочного блока в зависимости от изменения выиравочн)1 нодъемки нути.
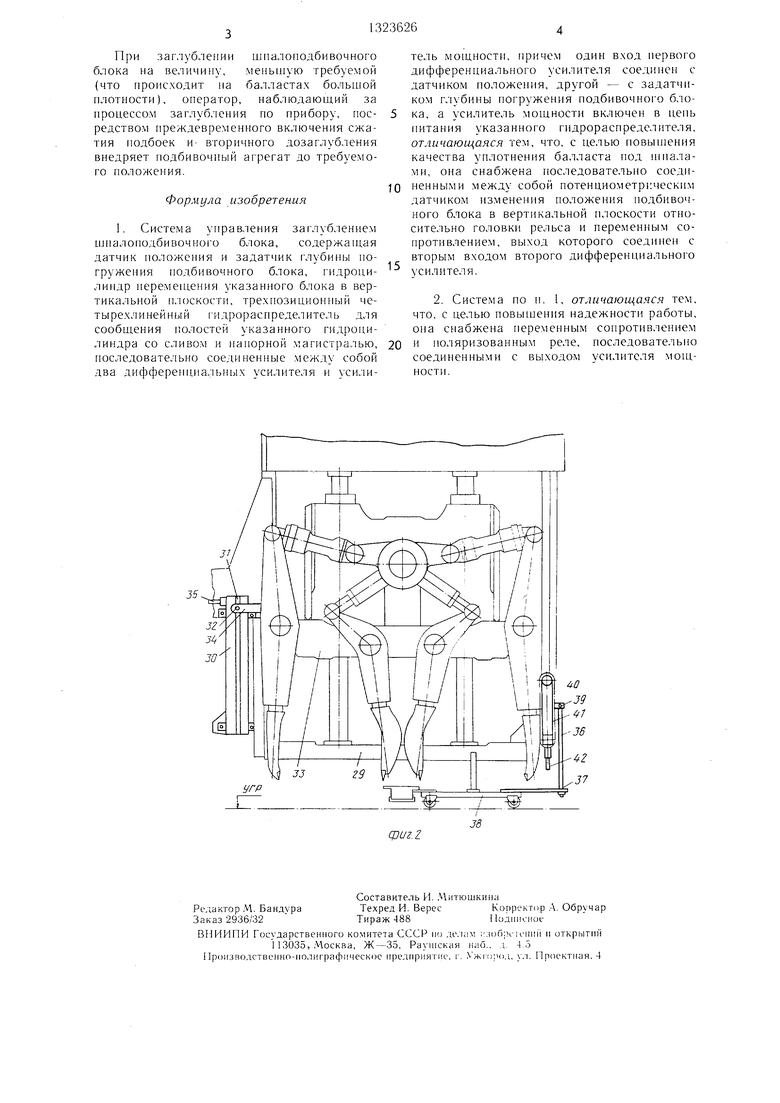
На фиг. I изображена схема системы управления заглублением ншалоиодбивоч- ного блока; на фиг . 2 - ншалоиодбивочный блок с датчиками положения и заглубления его в вертикал1 ной илоскости.
Система унрав,1ения заглуб. 1еиием н1на;1О- иодбивочного включает в себя .чат- чик 1 положения нша/юиодбивочного б.ло ка в вертика;1ьноГ1 и. юскостн, задатчнк 2 заданной глубины гил ружения блока, датчик 3 изменения но. южения шиалонодбн- вочного б. юка относите/илю головки рельса, | идрораснределите.1и 4 и 5. ,Цатчик 1 соединен с одним входом не)вог() ди(|)()еренциаль- ного усн,чите,1я 6. Второй вход усилителя 6 соединен с указате. 1ем 7 задатчика 2 г лу- бины погружения б,1ока. первого дн()- 4к ренина, 1ьиого усилителя 6 соединен с первым входом второго дифференциальио1 0 усилителя 8, вт(рой вход которого через иеременное сопротивление 9 соединен с датчиком 3. Выход уси. 1ите:1я 8 подключен к усилителю мощности 10, который через не- ременн1)1е сонротивлеиия 11 и 12 иодеоеди- нен к двум катушкам поляризованных ре- ,ie 13 и 14 соотве гствеино большой и малой зоны нечувствительности.
Контакты 15, 16 но,1яризованиьг ре.ле включены в питания катун1ек электро- ма1Л1 нтньг реле 17. Ко1ггакты 18 электромагнитных реле BKJUOHeiHji в цени нитания гидрораснределителей 4 н 5, управляющих оиуеканием и нодъемом нщалоиодбивочно- го б.чока. В эту пень вк иочены контакты ножной педали 19 уиравления онуеканием и нодъемом Н1иалонодбпвочного б, 1ока.
Гпдрораснределители 4 и 5 трубоирово- дом 20 соединены с насосом 21, а сливным трубопроводом 22 - - с баком 23. Трубонро- 24, 25, 26 и 27 соединены с нолостя- мн идропилиндра 28.
Датчик 1 смонтирован на раме 29 нша- .юподбивочпого блока и представляет собой , 1ииейный реостат 30, на котором расположен вертика.чьно направляющий стержень 31 с иолзуиом 152, связаии| 1Й со станиной 33 Н1на;1оиодбнвочного блока крои1п тейпом 34. Реостат 30 посредством кабеля 35 соединен с блоком унравлепия ноложепия и pei улирования скорости заглубления nnia- . юнодб и ночного блока.
.
10
15
20
25
30
35
40
45
50
55
Датчнк 3 смонтирован на раме 29 ннш- лоподбивочного блока и через стержень 36 и нлаетипу 37 соединен с из.мерительной тележкой 38 новодком 39. Поередство.м тросо- блочного устройства 40 новодок 39 связан с потенциометром 41, который через кабель 42 соединен е блоком управления ноложе- ния и регулирования скорости заглубления Н1налоподбивочного блока.
Система уиравления заглублением И1па- лонодбивочного блока работает еледующи.м образом.
Шна. юнодбивочный блок находится в рабочем иоложении. Задатчик 2 отрегулирован на требуемую величину за1 лубления в зависимости от тина верхнего строения нути и состояиия балласта. Величина сигнала от датчика 3, постунаюп1его на вход усилителя 8, отрегулирована е помощью неременного сопротивления 9 в зависимости от состояния балласта. В зависимости от состояния бал.часта установлены также зоны иечувствите.чьности реле больнюй и малой скоростей оиу екания Н1налог1одбнвочного б.лока.
Опускание .:1оподбивочиого блока начинается нрн нажатии оператором ма1ни- 1Н)1 ножной педали 19. В процессе опускания нн1а. К)нодбивочного блока с номоншю ди{)фереициа. 1Ы10го уеилителя 6 производится сравпепие поступающего от задатчика 2 си1 нала, со()тветствуюп1.е; о (|)актической величине заглубления П1нало1юдбнвочн()го б. юка, с устаповленпым значением указателя 7. Одновременно на дифферепппальном усилителе 8 нронсходит сравнение сигна;1а рассогласования с выхода усилителя 6 и сигнала с датчика 3, определяемого величи- пой выправочной подъемки нути. Сигнал рассог;1асования иоступает на уснлитель MOHu-iocTH 10 и далее на катущки поляризованных реле 13 и 14, которые е помощью переменных сопротивле1Н1Й II и 12 отрегулированы на ма:1ую и больн)ую зоны нечувствительности.
При достижении ве.чичины заг.публе |ия, соответствуюнхей большой зоне нечувствительности поляризованно|-о реле 14, оно отк:1ючается, обесточивая гидрораспреде- .читель 5, который реализует больп1ую скорость опускания нодбивочного блока. Далее оиускаиие 1Н 1алоподбивочного б,лока нродолжаетея с малой скоростью от гидро- раен)еделителя 4.
При заглуб.чении И1иа,чоподбивочного блока на величину, больн ую требуемой, сигнал рассогласования изменяет знак, и контакт 15 поляризованного реле 13 включает электро- маг питное реле иодчлша Н1иалоподбивочно- го блока. В результате этого шпалонодби- вочный блок поднимается и останавливается в требуемо.м положении с точностью, определяемой малой зоной нечувствительности ноляризованного реле 13.
При заг, 1ублеиии шна.лоподбивочного блока на величину, меньап ю требуемой (что происходит на балластах большой плотности), оператор, наблюдающий за процессом заглубления по прибору, посредством преждевременного включения сжатия подбоек и- вторичного дозаглубления внедряет подбивоч ый агрегат до требуемого положения.
Формула изобретения
1. Система управления заглублением 1ппалоподбивочно1 о блока, содержап;ая датчик положения и задатчик глубины погружения подбивочного блока, гидроци- линдр перемещения указанного блока в вертикальной плоскости, трехпозиционрПз Й четырехлинейный гидрораспределитель для сообщения полостей указанного гидропи- линдра со сливом и напорной магистралью, последовательно соединенные между собой два дифференциальных усилителя и усилитель мощности, причем один вход первого дифференциального усилителя соединен с датчиком положения, другой - с задатчиКОМ глубины погружения ПОДбИВОЧНО1 О бЛОка, а усилитель мощности включен в цепь питания указанного гндрораспределителя, отличающаяся тем, что, с це,1ью повьинения качества уплотнения балласта под шпалами, она снабжена последовательно соедипенными между собой потенциометрическпм датчиком изменения положения подбивочного блока в вертпкальной плоскости относительно головки рельса и переменным сопротивлением, выход которого соединен с вторым входом второго дифференциального усилителя.
2. Система по п. 1. отличающаяся тем, что, с целью повышения надежности работы, она снабжена переменным сопротив,чением и поляризованным реле, последовате,тьно соединенными с выходом усилителя мощности.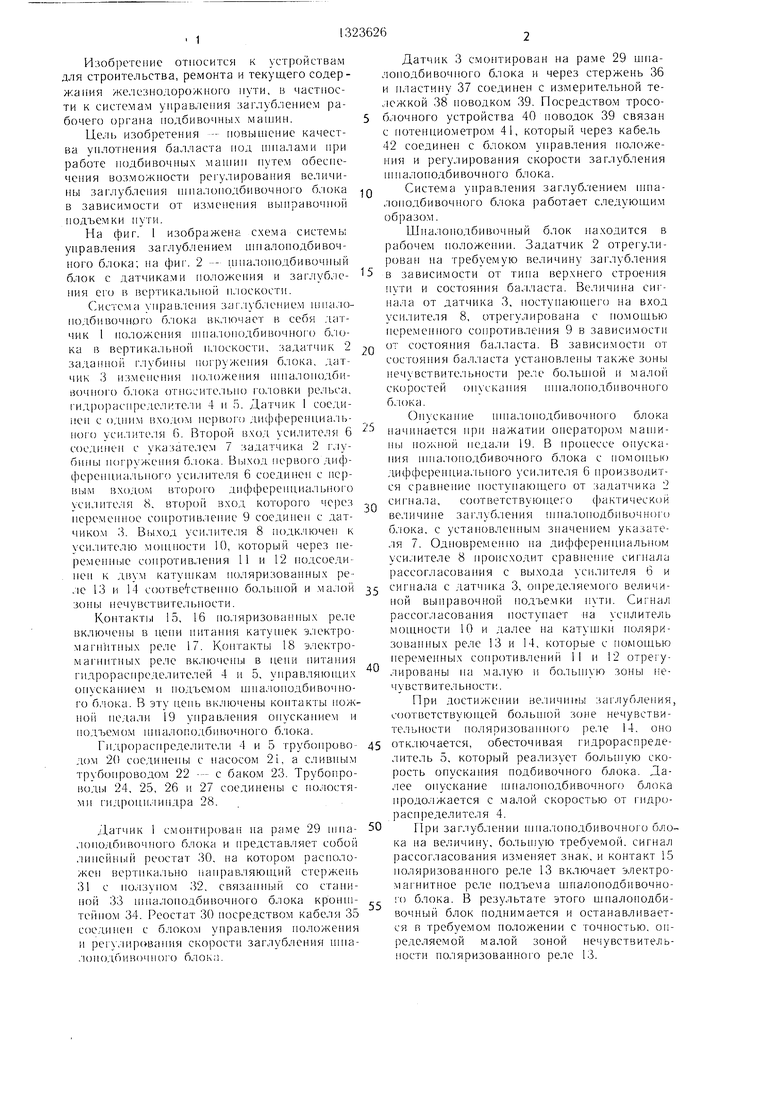
| название | год | авторы | номер документа |
|---|---|---|---|
| Шпалоподбивочная машина | 1980 |
|
SU965364A3 |
| СПОСОБ ПОДБИВКИ ШПАЛ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И МАШИНА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2468136C1 |
| СПОСОБ ПОДБИВКИ ШПАЛ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2008 |
|
RU2372440C1 |
| Подбивочно-выправочная машина | 1976 |
|
SU612987A1 |
| СПОСОБ ПОДБИВКИ ШПАЛ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2013 |
|
RU2534163C1 |
| СПОСОБ ПОДБИВКИ ШПАЛ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2011 |
|
RU2471912C2 |
| СПОСОБ ПОДБИВКИ ШПАЛ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2006 |
|
RU2304654C1 |
| Способ выправки железнодорожного пути и машина для его реализации | 1974 |
|
SU865137A3 |
| УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 1991 |
|
RU2030501C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ШПАЛОПОДБИВОЧНОЙ МАШИНОЙ | 1973 |
|
SU404919A1 |
Изобретение относится к устройства.м для строительства, ре.монта, текущего содержания железнодорожного пути. Цель изобретения - новышение качества уплотнения балласта под пшалами путем обеспечения возможности регулирования величины заглубления шналоподбивочного блока в зависимости от изменения вынравочной подъе.м- ки нути. Система управления заглублением нодбивочного блока включает в себя датчик положения пшалоподбивочного блока в вертикальной плоскости, задатчнк 2 заданной глубины погружения и блок регулирования скорости заглубления, а также датч.ик 3 изменения положения рамы относительно головки рельса, определяющий величин} вынравочной подъемки пути. .Предлагаемая система работает следующпм образом. Задатчпк 2, сигнал от датчика 3. поступающий на вход усилителя 8 с помощью переменного сонротивления, а также зоны нечувствительности реле 13, 14 больн ой и малой скоростей опускания нпшлоподбивочпо- го блока настроены на О11реде,1енное состояние балласта. Опускание щпалоподбпвочно- го блока начннается нри нажатни операш- ром ножной педали. На усилнтеле 8 проис- .ходмт сравнение сигнала рассогласования с выхода усилителя 6 и сигнала от датчика о. Сигнал рассогласова,ния поступает на ycii- литель мощпости 10, затем на катуп,1ки pi.-- ле 13, 14, руководяпше работой гилрорас 1 Ч - делителей, взаимодействуюнхих с гилроии- линдром нодъема и опускания пшалопил- бивочного блока. 1 з. н. ф-лы. 2 ил. (Л со ГчЭ СО Oi tsD CD 4wira ri 
Редактор М. Бандура Заказ 2936/32
Составитель И. .итюшкнна Техред И. ВересКорректор .Л. Обручар
Тираж 488 Ьдписное
ВНИИПИ Государственного комитета СССР по де.-iaM ;f:5o6;H ii iniii н открытнн
1 13035, .Москва, Ж-35, Раушская нао.. л, 45 Ироизволствсино-полиграфическос нрелприятие. г. ()p()л. л. Проектная. 4
q3ui.Z
38
| Шпалоподбивочная машина | 1980 |
|
SU965364A3 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
