Изобретение относится к области контроля состояния дробилок и может быть использовано на горно-рудных предприятиях черной и цветной металлургии, в химической промьшшенности и промьшшенности строительных материалов, в частности для контроля учета износа броней камеры дробления конусных дробилок.
. Цель изобретения - повьшение точ- ности контроля.
На чертеже представлено устройство для контроля учета износа броней камеры дробления конусных дробилок.
Устройство содержит датчик 1 ак- тивной мощности, пропорциональный преобразователь 2 с зоной нечувствительности, интеграторы 3-6, блоки 7деления, релейные элементы 10 и 11 без зоны нечувствительности релейные элементы 12 и 13 с зоной нечувствительности, сумматоры 14 и 15, квадратор 16, элемент 17 задержки, масштабирующие блоки 18-21, задатчик 22 смещения, регистрирующий прибор 23, релейные элементы 24 и 25 с зоной нечувствительности, элемент 26 задержки, сумматор 27-33, релейньй элемент 34 без зоны нечувствительности, интеграторы 35 и 36, масштабирующие блоки 37-56, задатчики 57-6.1 смещения, компаратор 62, задатчик 63 времени, коммутатор 64.
Устройство работает следующим образом.
В исходном состоянии после установки новой или капитального ремонта дробилки все интеграторы обнуляются, а задатчиками 22 и 57-61 смещения при необходимости фиксируют начальное состояние соответственно футеро- вочных броней, приводного вала с шестерней, конической и цилиндрической втулок эксцентрикового узла, сфери- ческого подпятника, гидрозатвора, прводного двигателя.
После включения приводного двигатля незагруженной дробилки, сигнал с датчика 1 мощности, соответствующий мощности P(t) РХХ преобразованньй в прямоугольный импульс положительно полярности релейным элементом 24 с зоной нечувствительности, поступает на вход интегратора 36 и через элемент 26 задержки, релейный элемент 2 с зоной нечувствительности, четвертый сумматор 28 и релейный элемент 34 без зоны нечувствительности посту
пает на вход интегратора 35. Релейный элемент 24 работает по алгоритму
24
1 , при Ug 7, 0,8Ux.y ; О, при Ugy 0,8U,
где - значение сигнала соответствующего мощности холостого хода приводного двигателя. Релейный элемент 25 работает по
алгоритму
и
25
-1, при Ue 0,3U2,,,e , О, при UB 0,, мчкс
Релейный элемент 34 работает по. алгоритму
и
1 , при UB; 0;
34
.0, при Ugx 0.
На вход интегратора 35 поступает импульс единичной амплитуды и с длительностью, равной времени задержки элемента 26, соответствующий одному запуску приводного двигателя. На выходе интегратора 35 формируется сигнал J, соответствующий количеству произведенных запусков,
Релейньй элемент 34 ограничивает поступление на вход интегратора 35 стационарного сигнала с релейного элемента 26 при отключении двигателя. На выходе интегратора 36 формируется сигнал, соответствующий времени работы приводного двигателя дробилки Tg. При загрузке дробилки материалом сигнал на выходе датчика мощности 1 увеличится P(t) Р и на выходе преобразователя 2 появится сигнал соответствующий мощности разрушения материала Р
Uj - К PpCt); Pp(t) P(t) - Р ,
где К - масштабный коэффициент.
Сигнал с выхода преобразователя 2, пройдя через релейный элемент 10 без зоны нечувствительности и интегратор 5, соответствует времени работы и KJ-TP загруженной дробилки, где Kj - масштабньй коэффициент.
Сигнал с выхода преобразователя 2, пройдя через интегратор 3, преобразуется в сигнал, соответствующий израсходованной на разрушение энергии
3 1324689
1 - 2 WP - Pp(t) где Kg - масштабный коэффициент;
xdt, где К - масштабньга коэффициент, а пройдя через блок 3 деления, преобразуется в сигнал, соответствующий 5 средней мощности разрушения U .-; Р(чр Wp/Tp, где Кц - масштабный коэффициент .
Сигнал с выходов блока 7 деления и преобразователя 2, пройдя сумматор 14, квадратор 16, интегратор 6 и
K,g , K,j,
- коэффициенты передачи с
ветствующих масштабирую
блоков
2 м,
(9
И а
, а
го
11
10
- свободный член и коэффи енты уравнения регрессии Поступившие на входы пятого с матора 29 через масштабирующие бл ки 37-40 сигналы с выходов блоков соответственно 3, 9, 8 и 35 и с 15 хода задатчика 57 смещения, преоб зуются в сигнал, соответствующий пени износа приводного вала с шес ней В
блок 9 деления, преобразуется в сигнал, соответствующий дисперсии мощности разрушения
t
и, (u,TUj) dt ;
t о{
D (Pp(t)-P, -l-I
Ар J
О
cp)dt ,
(D
в (Н-РХХ -R
к,
3 В; Зп + а + а4о21я «
37 WP +
+ а
S9
F +
где К - масштабньй коэффициент, «
Сигнал с выхода преобразователя 2, 25 пройдя релейный элемент 12 с зоной В нечувствительности, элемент 17 за-г держки, релейный элемент 13 с зоной нечувствительности, сумматор 17, релейный элемент 11 без зоны нечувст- зо Д 9 масштабный коэффициенту вительности, интегратор 4 и блок 8 де- К„, К ления, преобразуется в сигнал, соответствующий числу выбросов мощности и j F свыще заданного уровня (Pja соответствует зоне нечувствительности
31 }g J
KjoHK jfl- коэффициенты передачи соответствующих масштабируюш 1х блоков;
гс. S 37 релейного элемента 12) за единицу а,., а.
времени Тр, где К, - масштабный ко- и а 40 свободный член и коэффици- эффициент.енты уравнения регрессии.
Поступившие на входы сумматора
При этом на входе блоков 7-9 деле- зО через масштабирующие блоки 41- ния - сигнал с выхода интегратора 5, 44 сигналы с выходов блоков соответ- соответствующий времени работы загруженной дробилки. Поступившие на входы сумматора 15 через масштабирующие блоки 18-21 сигналы с выходов блоков соответственно 3 и 7-9 и с выхода задатчика 22 смещения, преобразуются в сигнал, соответствующий степени износа футеровочных броней Б
ственно 3, 9, 8и36ис выхода задатчика 58 смещения, преобразуются в сигнал, соответствующий степени износа конической и цилиндрической втулок эксцентрикового узла Э
Uio 59+ U4, + U4,.4- U,- Uji + Uj. K,+ U,. K,j+ UjgK,, .
и 15 % 19 11 io
+ U. К„+ Ug- К,
21+ и„-Кго
a,g-Wp + а,Р,р + aj,-F +
масштабный коэффициент;
коэффициенты передачи сйответствующих масштабирующих
блоков
2 м,
(9
И а
, а
го
11
- свободный член и коэффициенты уравнения регрессии. Поступившие на входы пятого сумматора 29 через масштабирующие блоки 37-40 сигналы с выходов блоков соответственно 3, 9, 8 и 35 и с вы- хода задатчика 57 смещения, преобразуются в сигнал, соответствующий степени износа приводного вала с шестерней В
20 гэ
UP+ Uj.-f Ujg Ujg-b
и
51
+ ц- к,, - Ug-Kj Uj
Kj5 и„к,о.
а «
37 WP +
+ а
S9
F +
масштабный коэффициенту
масштабный коэффициенту
коэффициенты передачи соответствующих масштабируюш 1х блоков;
зО через масштабирующие блоки 41- 44 сигналы с выходов блоков соответ-
ственно 3, 9, 8и36ис выхода задатчика 58 смещения, преобразуются в сигнал, соответствующий степени износа конической и цилиндрической втулок эксцентрикового узла Э
зО через масштабирующие блоки 41- 44 сигналы с выходов блоков соотве
Uio 59+ U4, + U4,.4- U,- Uji + Uj. K,+ U,. K,j+ UjgK,, .
к„-эг
se- + + a4jF
55
+ lTe,
где - масштабный коэффициент j 41
К. иК.- коэффициенты передачи соответствующих масштабирующих блоков}
je 41 а j, а j 3
и а - свободный член и коэффицр еНты уравнения регрессии. Поступившие на входы сумматора 31 через масштабирующие блоки 45-48 сигналы с выходов блоков соответственно 3, 9, 8 и 36 и с выхода задатчика 59 смещения, преобразуются в сигнал, соответствующий степени износа сферического подпятника С
и, 55+ U4t+ и.,+ U48
и 59 +
+ Uj- K4f+ Ug- Ug K4T+
K,,-c; .
с a5,+ + + a.P +
+ a 48 -TB,
где K - масштабный коэффициент;
К 45 К 4,
К. и K,j - коэффициенты передачи соответствующих масштабирующих блоков 5
« 41
И a4g - свободный член и коэффициенты уравнения регрессии,, Поступившие на входы сумматора 32 через масштабирующие блоки 49-52 сигналы с выходов блоков соответственно 35, 3, 9 и 8 и с выхода задатЧика 60 смещения преобразуются в сигнал, соответствующий степени износа гидрозатвора Г
.. 0 + Ojj.K,,.U3., -kj,-Ug-K5,,
п-
г Bg + o+asoWp + а,, D +
51
+ aj, F,
масштабный коэффициент;
коэффициенты передачи соответствующих масштабирующих блоков;
свободный член и коэффициенты уравнения регрессии.
Поступившие на входы сумматора 33 через масштабирующие блоки 53-56 сигналы с выходов блоков соответственно 35, 36, 3 и 8 и с выхода задатчика 61 смещения преобразуются в сигнал, соответствующий степени износа приводного двигателя Дд
Ш
33 « UH- и 61
+ .- Uj5K,4+.U3-K55- Ug.Kj,
Дз К-,3;
15 Д, , + а +
.
где - масштабный коэффициент; К JJ , К J ,
4t
ветствующих масштабирующих
блоков,
К j коэффициенты передачи соот 41 Sit а,а
и а д- - свободный член и коэффициенты уравнения регрессии, Сигналы с выходов сумматоров 15 и 29-33 поступают на входы регистрирующего прибора 23 и на входы компаратора 62. Одновременно на вход компаратора пос тупает сигнал с задатчика 63 времени между профилактическими ремонтами. В компараторе 62 вьщеляется
элемент или узел, имеющий ресурс рабочего времени меньше времени между профилактическими ремонтами. С выхода компаратора 62 на вход регистрирующего прибора 23 поступает, сигнал, несущий информащдю о наименовании элемента, или узла, подлежащего замене или восстановлению при следующем профилактическом ремонте.
При обработке поступившей информа)даи в регистрирующем приборе 23 и
зьщаче информации диспетчеру отдается приоритет сигн,злу, поступившему с компаратора 62. Сигнал коммутатора 64 вкодов поступая в регистрирующий прибор, обеспечивает селективную регистрацию и индикацию .информации по всем контролируемым параметрам.
На входы регистрирующего прибора 23 поступают сигналы с блоков соотвбтственно 35,36,3,8,9 и 7,Hecymjie информацию соответственно о количестве запусков привода Zj времени работы привода Т ,израсходованной энергии на разрушение материала Ур,,частоте выбросов
мощности свыше заданного уровня F,дисперсии мощности разрушения D и среднем значении мощности разрушения Регистрация информации о текущих nepeMeHHbixZ, , Tj, Wp, F, D и необходима для экспериментального уточнения коэффициенто в регрессивных уравнений связи
f, f
f.
(Wp,Pcp,
I, -р
Fp);
(Wp,D, F ,Z,);
(T;, V D, F );
С f4 (T
S
D, Wp);
P );
,13),
fjT (Wp,, D, F,
, flg ffcdg, Wp, rp
и настройки, коэффициентов передачи Ki8. К,, Kj, , К и Kj, ,.. .,Kj со- ответственно масштабирующих блоков 18-21 и 37-56 и выходных сигналов и, , и , ..., и соответственно задатчиков 22 и 57-61 смещения.
Регистрация переменных Zj, Тц, W, F, D, Pep осуществляется путем перезаписи текущего значения переменной в- отведенном регистре памяти при каждом подключении коммутатором 64 соответствующего входа. После каждого полного или частичного ремонта дробилки вносятся соответствующие коррективы о ресурсу восстановленных элементов и узлов соответствующими задатчиками 22 и 57-61 смещения. Для сохранения информации при аварийных отключениях питающего напряжения в регистрирующем приборе 23 предусмотрена неэнергоемкая память.
Предлагаемое устройство позволяет повысить точность контроля учета из15 ра соединен с вторым входом первого блока деления и входом первого масштабирующего блока, выход которого соединен с первым входом второго сумматора, выход первого блока деления
20 соединен с вторым входом первого сумматора и через второй масштабирующий блок - с вторым входом второго сумматора. Выход первого сумматора через последовательно соединенные квадра25 тор и третий интегратор соединен с вторым входом второго блока деления, выход которого через третий масштабирующий блок соединен с третьим входом второго сумматора, выход пер30 вого релейного элемента с зоной нечувствительности подключен к входу первого элемента задержки, выход которого соединен с входом второго релейного элемента с зоной нечувстви3, тельноети, выход второго релейного элемента без зоны нечувствительности через четвертый интегратор соединен с вторым входом третьего блока деления, выход которого соединен через
Q четвертый масштабир тонций блок с четвертым входом второго сумматора, а выход первого задатчика смещения соединен с пятым входом второго сумматора, выход которого соединен с пер- носа броней камеры дробления конусных 45 IM входом регистрирующего прибора, дробилок.отличающееся тем, что, с
целью повышения точности контроля.
Формула изобретения оно снабжено третьим и четвертым релейными элементами с зоной нечувствиУстройство для контроля учета из- JQ тельности,вторым элементом задержки, носа броней камеры дробления конусных третьим, четвертым, пятым, шестым, дробилок, содержащее датчик активной седьмым, восьмым и девятым суммато- мощности, пропорциональный преобразо- рами, третьим релейным элементом без ватель с зоной нечувствительности, зоны нечувствительности, пятым и четыре интегратора, три блока деления,-г шестым интеграторами, пятым, шестым, два релейных элемента без зоны нечув- седьмым, восьмым, девятым, десятым, ствительности, два релейных элемен- одиннадцатым, двенаднатым, тринадца- та с зоной нечувствительности, два тым, четырнадцатым, пятнадцатым, сумматора, квадратор, элемент задерж- .шестнадцатым, семнадцатым, восемнад
, 24689 8
ки, четыре масштабирующих блока, пер- вьй задатчик смещений и регистрирующий прибор, причем датчик активной мощности через пропорциональный преобра- зователь с зоной нечувствительности соединен с первым входом первого сумматора, с входами первого интегратора, первого релейного элемента с зоной нечувствительности, и первого реfO лейного элемента без зоны нечувствительности, выход которого соединен через второй интегратор с первыми входами первого, второго и третьего блоков деления, выход первого интеграто15 ра соединен с вторым входом первого блока деления и входом первого масштабирующего блока, выход которого соединен с первым входом второго сумматора, выход первого блока деления
20 соединен с вторым входом первого сумматора и через второй масштабирующий блок - с вторым входом второго сумматора. Выход первого сумматора через последовательно соединенные квадра25 тор и третий интегратор соединен с вторым входом второго блока деления, выход которого через третий масштабирующий блок соединен с третьим входом второго сумматора, выход пер30 вого релейного элемента с зоной нечувствительности подключен к входу первого элемента задержки, выход которого соединен с входом второго релейного элемента с зоной нечувстви3, тельноети, выход второго релейного элемента без зоны нечувствительности через четвертый интегратор соединен с вторым входом третьего блока деления, выход которого соединен через
Q четвертый масштабир тонций блок с четвертым входом второго сумматора, а выход первого задатчика смещения соединен с пятым входом второго сумма
цатым, девятнадцатым, двадцатым, двадцать первым, двадцать вторым, двадцать третьим и двадцать четверты (Масштабирующими блоками, вторым, третьим, четвертым, пятым и шестым задатчиками смещения, компаратором, задатчиком времени и коммутатором, причем первый вход третьего сумматора подключен к выходу первого релейного элемента с зоной нечувствительности, выход второго релейного элемента с зоной нечувствительности подключен к второму входу третьего сумматора, выход которого подключен к входу второго релейного элемента без зоны нечувствительности, датчик активной мощности подключен к входу третьего релейного элемента с зоной нечувствительности, выход которого соединен с входом пятого интегратора, с первым входом четвертого сумматора и с входом второго элемента задержки, выход которого соединен с входом четвертого релейного элемента с зоной нечувствительности, выход которого подключен к второму входу четвертого сумматора, выход которого через третий релейньй элемент без зоны нечувствительности соединен с входом шестого интегратора, выход ко торого соединен с вторым входом регистрирующего прибора с входами пято roj шестого и седьмого масштабируюш 1х
блоков, выход пятого интегратора подключен к входу восьмого и девятого масштабирующих блоков, выход первого интегратора подключен к входам десятого, одиннадцатого, двенадцатого, тринадцатого и четьфнадцатого масштабирующих блоков и к третьему вхйду регистрирующего прибора, выход первого блока делений соединен с четвертым входом регистрирующего прибора, выход второго блока деления соединен с входами пятнадцатого, шест- надцатого, семнадцатого и восемнадцатого масштабирующих блоков и с пятым входом регистрирующего прибора, выхо третьего блока деления соединен с входами девятнадцатого, двадцатого, двадцать первого, двадцать второго и
to
15
30
35
40
5Q
2468910
двадцать третьего масшатбирующих блоков и шестьм входом регистрирующего прибора, выход пятого интегратора соединен с входом двадцать четвертого масштабирующего блока и с седьмым входом регистрирующего прибора, второй задатчик смещения и выходы седьмого, десятого, пятнадцатого, двадцать третьего масштабирующих блоков соединены с соответствующими входами пятого сумматора, третий, задатчик смещения и выходы одиннадцатого, шестнадцатого, двадцать второго, двадцать четвертого масштабирующих блоков соединены с соответствующими входами шестого сумматора, четвертый задатчик смещения и выходы девятого, двенадцатого, семнадцатого, двадцать первого масштабирующих блоков соединены с соответствующими входами седьмого сумматора, пятый задатчик смещения и выходы пятого, четырнадцатого, восемнадца то- го, масштабирующих блоков соединены с соответствующими входами восьмого сумматора, шестой задатчик смещения и выходы шестого, восьмого, тринадцатого, двадцатого масштабирующих блоков соединены с соответствующими входами девятого сумматора, выход второго сумматора подключен к первому входу компаратора, выход пятого сумматора подключен к второму входу компаратора и к восьмому входу регистрирующего прибора, выход шестого сумматора подключен к третьему входу ком паратора и к девятому входу регистрирующего прибора, выход седьмого сумматора подключен к четвертому входу компаратора и к десятому входу регистрирующего прибора, выход восьмого сумматора подключен к пятому входу компаратора и к одиннадцатому входу регистрирующего прибора, выход девятого сумматора подключен к шестому входу компаратора и к двенадцатому входу регистрирующего прибора, задатчик времени подключен к седьмому входу компаратора, выход которого соединен с тринадцатым входом регистрирующего прибора, четырнадцатый вход которого соединен- с коммутатором.
20
25


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования упруговязкой фрикционной пары | 1990 |
|
SU1780091A1 |
| Импульсное регулирующее устройство | 1985 |
|
SU1267358A1 |
| Система позиционного управления электроприводом | 1985 |
|
SU1312521A1 |
| Адаптивная система регулирования нелинейного объекта,например,шахтной печи | 1985 |
|
SU1297008A1 |
| Пропорционально-интегральнодифференциальный регулятор | 1977 |
|
SU696410A1 |
| Устройство для моделирования привода конвейера | 1990 |
|
SU1762314A1 |
| Развертывающий операционный усилитель | 1983 |
|
SU1166142A1 |
| Импульсное регулирующее устройство | 1983 |
|
SU1151926A1 |
| Тренажер для подготовки яхтсменов | 1987 |
|
SU1515184A1 |
| Система управления | 1983 |
|
SU1120283A1 |
Изобретение относится к устройствам контроля за состоянием дробилок и может быть использовано на горнорудных предприятиях черной и цветной металлургии, в химической промышленности и промьгатенности строительных материалов. Изобретение позволяет повысить точность контроля учета износа броней камеры дробления конусных дробилок. Устройство содержит датчик 1 активной мощности, пропорциональный преобразователь 2 с зоной нечувствительности, интеграторы 3 и 4, задатчики 5 и 6 смещения, масштабирующий блок 7, блоки 8 и 9 деления, релейные элементы 10 и 11 без зоны нечувствительности, релейные элементы 12 и 13 с зоной нечувствительности, сумматоры 14 и 15, квадратор 16, элемент 17 задержки, масштабирующие блоки 18-21, задатчик 22 смещения, регистрирующий прибор 23, релейные элементы 24 и 25 с зоной нечувствительности, элемент 26 задержки, сумматоры 27-33, релейный элемент 34 без зоны нечувствительности, интеграторы 35 и 36, масштабирующие блоки 37-56, задатчики 57-61 смещения, компаратор 62, задатчик 63 времени, коммутатор 64. 1 ил. с в (Л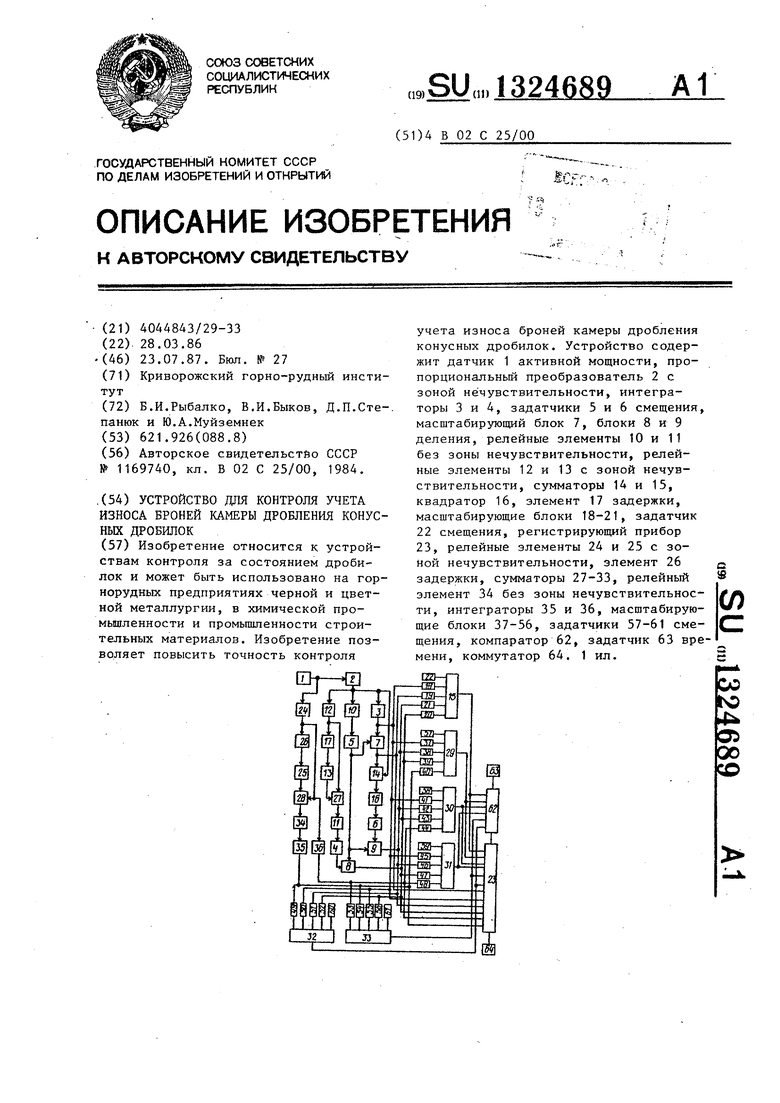
| Авторское свидетельстйо СССР № 1169740, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
