Изобретение относится к аналоговой вычислительной технике и предназначено для использования при моделировании ленточных конвейеров с барабанным приводом, в которых усилие на тяговый орган передается за счет сил трения.
Известно устройство моделирования привода конвейера, содержащее три сумматора, блок сравнения и реле с группой контактов.
Наиболее близким к предлагаемому является устройство для моделирования муфт трения, которое содержит интегратор, выход которого является выходом устройства, первый и второй входы которого подключены соответственно к первому и второму входам первого сумматора, выход последнего соединен и с входом двухполупериодного выпрямителя, выход которого подключен к первым входам соответственно второго и третьего сумматоров, вторые входы которых соединены соответственно с выходами первого и второго источников постоянного напряжения, выход второ о сумматора
подключен к первому входу блока деления, выход которого соединен с третьим входом третьего сумматора, выход последнего подключен к первому входу блока ограничителя и входу инвертора, выход которого соединен со вторым входом блока ограничения, первый и второй выходы которого подключены соответственно к выходу и входу интегратора, вход последнего соединен с первыми выводами первого и второго масштабных резисторов, вторые выводы которых соединены соответственно с первым и вторым входами устройства, кроме того, в него введены дополнительные интегратор и сумматор, третий и четвертый источники постоянного напряжения и релейный усилитель, вход которого подключен к входу дополнительного интегратора, выход последнего соединен с первым входом дополнительного сумматора, выход которого подключен к второму входу блока деления, выходы третьего и четвертого источников постоянного напряжения соединены соответственное первым входом релейного уси(Л
С
vj
О ЬО
СО
Ј
лителя, с вторым входом дополнительного сумматора, третий вход которого подключен к выходу второго источника постоянного напряжения, выход двухполупериодного выпрямителя соединен с вторым входом релейного усилителя.
Недостатками этого устройства является то, что формирование предельно допустимого по условиям фрикционной связи момента, который может быть передан от приводного барабана к ленте осуществляется в функции скорости скольжения контактирующих поверхностей, в то время как в конейерных приводах эта величина, в первую очередь, зависит от соотношения моментов, обусловленных усилиями натяжения ленты в набегающей и сбегающей ветвях. Кроме того, это устройство не обеспечивает формирование сигналов пропорциональных скоростям ленть и приводного барабана.
Целью изобретения является повышение точности моделирования за счет воспроизведения на модели режимов и условий адекватных тем, что имеют место в реальных конвейерах с фрикционной связью между приводным барабаном и лентой.
Поставленная цель достигается тем. что в устройство содержащее компаратор, первый сумматор, второй сумматор, выход которого соединен с входом инвертора и первым входом задания уровня ограничения формирователя зоны нечувствительности, второй вход задания уровня ограничения которого подключен к выходу инвертора, интегратор, выход которого является выходом приведенной частоты вращения ленты устройства, введен интегросумматор, выход которого является выходом частоты вращения барабана устройства, суммирующий усилитель, в цепь обратной связи которого включен формирователь зоны нечувствительности, выход первого сумматора соединен с первым входом интегросумматора и первым входом суммирующего усилителя, выход которого подключен ко входу интегратора и ко второму входу интегратора, выход которого подключен к первому входу компаратора, выход которого соединен со вторым входом суммирующего усилителя, выход интегратора соединен со вторым входом компаратора, первые входы первого и второго сумматоров объединены и являются входом задания значения момента от усилия набегания устройства, вторые входы первого и второго сумматоров объединены и являются входом задания значения момента от усилия сбегания устройства, третьи входы первого и второго сумматоров
объединены и являются входом задания приведенного момента сил сопротивления движению ленты устройства, четвертый вход первого сумматора является входом
задания момента сил сопротивления движению барабана устройства и пятый вход первого сумматора является входом задания движущего момента устройства.
Введение новых признаков существенно повышает точность моделирования, так как обеспечивает четкое разграничение режимов работы как без буксования, так и при его наличии. Причем условие возможного возникновения режима буксования определяется по предельному уровню момента, который может быть передан от барабана к ленте за счет сил трения. Значение последнего, в свою очередь, непрерывно вырабатывается устройством, как линейная
функция соотношения моментов от усилий набегания и сбегания.
В режиме буксования устройство позволяет получить сигналы пропорциональные как частоте вращения приводного барабана, так и приведенной частоте вращения ленты.
Выход из режима буксования обеспечивается только при одновременном снижении момента передаваемого от барабана к
ленте ниже предельного уровня и достижении равенства частот вращения приводного барабана и ленты.
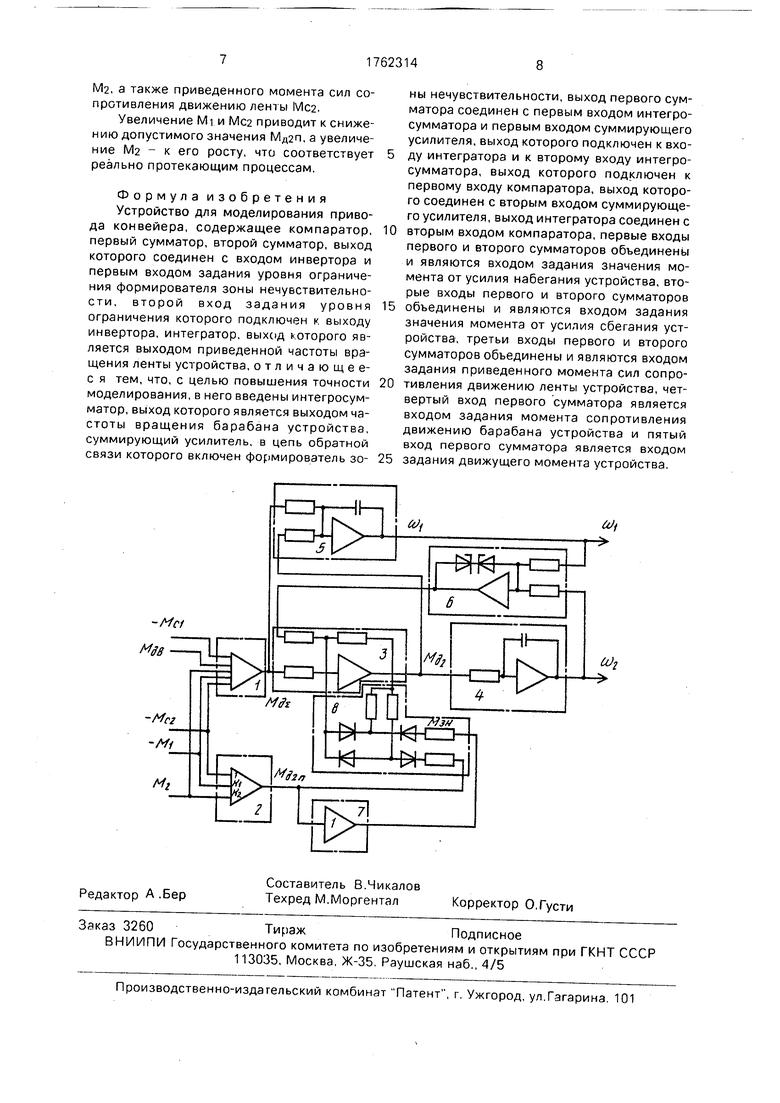
На чертеже представлена принципиальная схема устройства.
Устройство для моделирования привода конвейера состоит из первого 1 и второго 2 сумматоров, суммирующего усилителя 3, интегратора 4, интегросумматора 5, компаратора 6, инвертора 7 и формирователя зоны нечувствительности 8.
Первые входы первого 1 и второго 2 сумматоров объединены и являются первым задающим входом устройства, на который
подается напряжение пропорциональное моменту от усилия набегания. Вторые входы первого 1 и второго 2 сумматоров объединены и являются вторым задающим входом устройства, на который поступает сигнал
пропорциональный моменту от усилия сбегания. Третьи входы первого 1 и второго 2 сумматоров также объединены и являются третьим входом устройства, на который подается напряжение пропорциональное приведенному моменту сил сопротивления движению ленты. Четвертый вход первого сумматора 1 используется для задания величины момента сопротивления движению приводного барабана, а пятый вход этого же сумматора - для задания величины движущего момента, имитирующего источник механической энергии.
Выход первого сумматора 1 соединен с первыми входами суммирующего усилителя 3 и интегросумматора 5. Выход суммирующего усилителя 3 подключен ко входу интегратора 4 и второму входу интегросумматора
5.Выход последнего является первым выходом устройства, на котором формируется напряжение, пропорциональное частоте вращения приводного барабана конвейера, он соединен с первым входом компаратора
6.Выход интегратора 4 представляет собой второй выход устройства, он соединен со вторым входом компаратора 6, выход которого подключен ко второму входу суммирующего усилителя 3.
Формирователь зоны нечувствительности 8 включен в цепь обратной связи суммирующего усилителя 3, а своими входами задания уровня ограничения он соединен с выходом второго сумматора 2.
Причем первым - непосредственно, а вторым - через инвертор 7.
Устройство моделирования привода конвейера работает следующим образом. В результате алгебраического суммирования входных напряжений устройства, которые пропорциональны движущему моменту Мдв. моментам от усилия набегания MI и сбегания - М2, а также моментов сопротивления движению барабана МС1 и ленты МС2, на выходе первого сумматора 1 формируется напряжение пропорциональное суммарному динамическому моменту Мд;, которое поступает на первый вход суммирующего усилителя 3, выходом которого является напряжение пропорциональное приведенному динамическому моменту Мд2. воздействующему на ленту.
При нулевом выходном сигнале UK компаратор 6, что выполняется при условии равенства частот вращения барабана Wi и ленты Л/2 (режим отсутствия буксования), и величине сигнала Мд2 ниже уровня Мд2п. задаваемого формирователем зоны нечувствительности 8. напряжение Мд2 оказывается пропорциональным Мдй. и без искажений поступает на вход интегратора 2 и второй вход интегросумматора 5. После алгебраического суммирования на входе последнего сигналов Мд и МД2 образуется величина пропорциональная динамическому моменту МД1, приложенному к приводному барабану. В результате интегрирования на выходе интегросумматора формируется напряжение пропорциональное частоте вращения барабана WL
Одновременно сигнал МД2 обрабатывается интегратором 4. на выходе которого
образуется напряжение пропорциональное приведенной частоте вращения ленты.
Поскольку в рассмотренном варианте осуществляется линейное преобразование
переменных, при надлежащем выборе коэффициентов передачи операционных блоков обеспечивается равенство напряжений | Wi и , что соответствует режиму работы конвейера без буксования.
При увеличении напряжения пропорционального движущемуся моменту, подаваемому на пятый вход устройства, естественно, растет и Мд. Это может привести к тому, что выходное напряжение МД2
суммирующего усилителя 3 достигнет уровня ограничения Мд2п, определяемого формирователем зоны нечувствительности 8. Дальнейший его рост становится невозможным (эта ситуация соответствует достижению предельного момента, обусловленного силами трения в реальном объекте). Нарушается пропорциональная связь между Мд1 и Мд2. Динамический момент Мд2 начинает расти быстрее, чем Мд2 и, следовательно, сигнал j Wi ( превышает сигнал jWai. Наступает режим буксования.
Из-за неравенства сигналов ; jWa на выходе компаратора 6 появляется напряжение UK, которое поступая на 2-й вход суммирующего усилителя 3 гарантировано
удерживает на его выходе сигнал МД2 на
уровне Мр2п независимо от напряжения
МдЈ. поступающего на его первый вход.
Если теперь уменьшить движущий момент Мдв до такого уровня, чтобы, например Мд стал равным нулю, то, в силу неравенства частот вращения барабана WL и ленты Л/2. между ними будет осуществляться взаимодействие только через трение скольжения. Поэтому динамические моменты, воздействующие на барабан и ленту одинаковы по модулю Мд2п|, но противоположно направленными. В результате сигнал Wi, на выходе интегросумматора 5 начнет
уменьшается, а сигнал Л/2 на выходе интегратора 4 - расти (по модулю). При выравнивании их модулей, напряжение UK на выходе компаратора 6 станет равным-нулю. Это приведет к установлению равновесия в
системе, так как МД2 на выходе суммирующего усилителя 3 принимает нулевое значение.
Цепочка блоков из второго сумматора 2, инвертора 7 и формирователя зоны нечувствительности 8 обеспечивает поддержания уровня ограничения выходного сигнала суммирующего усилителя 3 в зависимости от соотношения таких входных сигналов как моменты от усилий набегания Mi и сбегания
М2, а также приведенного момента сил сопротивления движению ленты Мс2.
Увеличение MI и Мс2 приводит к снижению допустимого значения Мд2п, а увеличение М2 - к его росту, что соответствует реально протекающим процессам.
Формула изобретения Устройство для моделирования привода конвейера, содержащее компаратор, первый сумматор, второй сумматор, выход которого соединен с входом инвертора и первым входом задания уровня ограничения формирователя зоны нечувствительности, второй вход задания уровня ограничения которого подключен к выходу инвертора, интегратор, выход юторого является выходом приведенной частоты вращения ленты устройства, отличающее- с я тем, что, с целью повышения точности моделирования, в него введены интегросум- матор, выход которого является выходом частоты вращения барабана устройства, суммирующий усилитель, в цепь обратной связи которого включен формирователь зо-
ны нечувствительности, выход первого сумматора соединен с первым входом интегро- сумматора и первым входом суммирующего усилителя, выход которого подключен к входу интегратора и к второму входу интегро- сумматора, выход которого подключен к первому входу компаратора, выход которого соединен с вторым входом суммирующего усилителя, выход интегратора соединен с вторым входом компаратора, первые входы первого и второго сумматоров объединены и являются входом задания значения момента от усилия набегания устройства, вторые входы первого и второго сумматоров объединены и являются входом задания значения момента от усилия сбегания устройства, третьи входы первого и второго сумматоров объединены и являются входом задания приведенного момента сил сопротивления движению ленты устройства, четвертый вход первого сумматора является входом задания момента сопротивления движению барабана устройства и пятый вход первого сумматора является входом задания движущего момента устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования жесткой фрикционной муфты | 1990 |
|
SU1817112A1 |
| Устройство для моделирования упруговязкой фрикционной пары | 1990 |
|
SU1780091A1 |
| Устройство для моделирования двигателя внутреннего сгорания | 1986 |
|
SU1348869A1 |
| Устройство для моделирования @ -фазного вентильного электродвигателя | 1990 |
|
SU1797133A1 |
| Устройство для моделирования аккумулирующей электростанции | 1986 |
|
SU1453423A1 |
| Устройство для моделирования бесконтактного двигателя постоянного тока | 1985 |
|
SU1307468A1 |
| Устройство для моделирования двухстороннего пневматического двигателя | 1980 |
|
SU942068A1 |
| Устройство для моделирования упругой характеристики привода в виде петли гистерезиса | 1980 |
|
SU942061A1 |
| Устройство для воспроизведения зависимости силы трения от нормальной силы,скорости,времени и предварительного смещения | 1985 |
|
SU1312619A1 |
| Устройство управления процессом формования пленочных материалов | 1989 |
|
SU1671742A1 |
Изобретение относится к аналоговой вычислительной технике и может быть использовано при моделировании ленточных конвейеров с барабанным приводом,в которых усилие на тяговой орган передается за счет сил трения. Цель изобретения - повышение точности моделирования. Для этого в устройство введены интегросумматор и суммирующий усилитель, в цепь обратной связи которого включен формирователь зоны нечувствительности. 1 ил.
Id ШБ2
| Устройство для моделирования силы трения | 1986 |
|
SU1399779A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Механическая топочная решетка с наклонными частью подвижными, частью неподвижными колосниковыми элементами | 1917 |
|
SU1988A1 |
| Устройство для моделирования муфт трения | 1981 |
|
SU1003109A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
