Изобретение относится к роботострению и может быть использовано при точном позиционировании и отработке траектории рабочим органом манипулятора.
Цель изобретения - расширение технологических возможностей за счет обеспечения дополнительных режимов работы привода.
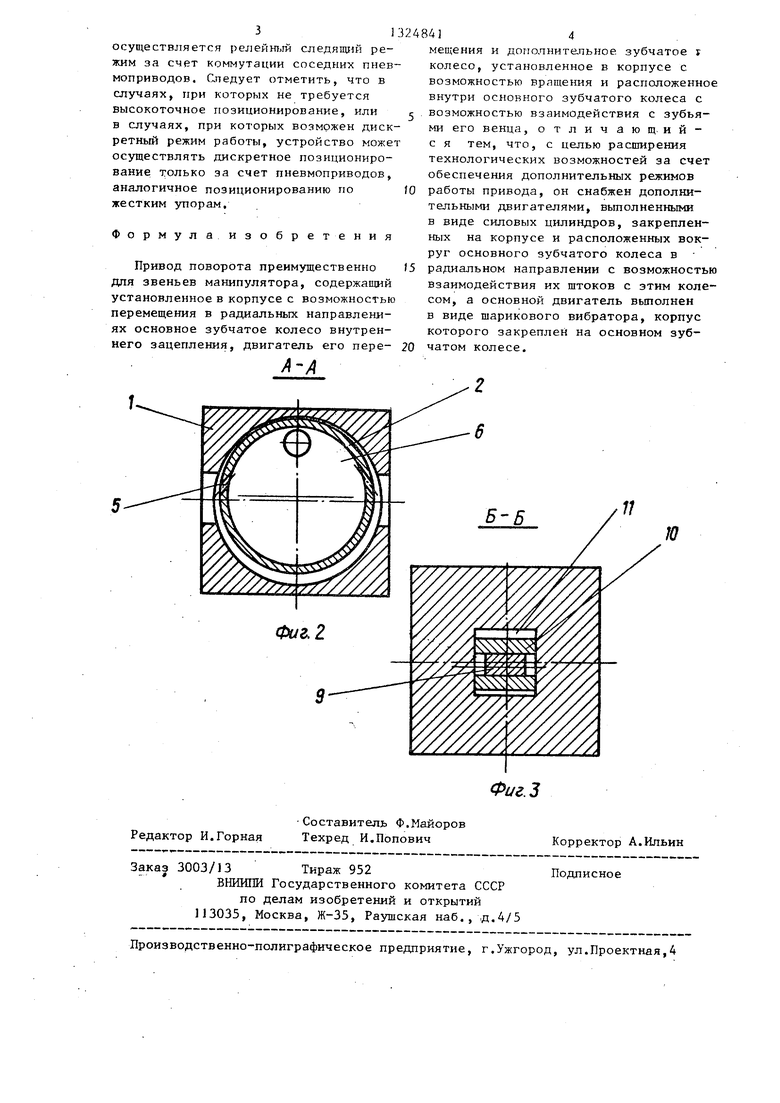
На фиг.1 изображен предлагаемый привод поворота, обшлй вид; нафиг„2 сечение А-А на фиг..1; на фиг„3 - се чение Б-Б на фиг,1,
Привод поворота содержит корпус 1 в котором расположен вибратор 2, имеющий полость 3 с размещенным в ней шариком 4, Вибратор имеет каналь 5 и 6 для подвода воздуха в полость Эр установлен на опорах 7 и жестко связан с.основным зубчатьм колесом 8 внутреннего зацепления, В торцовой части вибратора выполнен шип 9, входящий в паз сухаря 10, Последний в свою очередь расположен в пазу корпуса 1, Шип 9,, сухарь 10 с пазом и паз 11 корпуса 1 образуют крестообразную муфту, удерживающую вибратор 2, а следовательно и колесо 8 от поворота вокруг собственной оси и дающую возможность их перемещению в двух взаимно перпендикулярных направлениях, определяемых пазами. Кроме этого, внутри корпуса 1 3 подлипниковой опоре 12 расположен выходной вал 13J жестко связанный либо выполненный заодно целое с дополнительным зубчатым колесом 14, зубья которого находятся в зацеплении с внутренними зубьями колеса 8. Венец и шестерня расположены с эксцентриситетом е , равным половине разности их делитех.ьных диаметров (при некоррегированном зацеплении), Зазор К, между торцами вибратора и колеса 4 обеспечивается опорой 15. С выходным валом 13 связан вал 16 датчика угла поворота, корпус 17 которого установлен на корпусе 1, На последнем также установлены несколько, например четыре силовых цилиндров (пневмоприводов) 18 оси которых перпендикулярны-оси колеса 14. Штоки 19 пневмоприводов через отверстия в корпусе 1 имеют возможность контактирования с колесом 8. фиг о 1 показан один из вариан- .тов стыковки устройств друг с другом при построении руки манипулятора. На
0
5
0
втором приводе датчик обратной .вязи условно не показан.
Привод поворота работает следую- шлм образом,,
Для поворота на заданный угол, допустим, против часовой стрелки, если смотреть со стороны выходного вала 13, давление подается через канал 6 в полость вибратора 2. Под действием струи воздуха шарик 4 вращается против часовой стрелки. Создаваемая им центробежная сила.воздействует на корпус вибратора, а следовательно, на зубчатое колесо 8, постоянно поджимая его к колесу 14, зубья которого находятся в зацеплении с внутренними зубьями колеса 8. Вектор центробежной силы, создаваемой шариком, вращается с ним и смещает зоны контакта зубьев шестерки и венца, так как изменяется положение в плоскости центра венца, вращение которого вокруг собственной оси предотвращается крестообразной муф- 5 той, состоящей, из шипа 9, сухаря 10 с пазом и выполненного в корпусе паза 11. Зубчатый венец колеса 8 совершает при этом плоскопараллельиые круговые колебания за счет перемещения по пазс1м, выполненным в сухаре 10 и корпусе 1, при котором его ось описывает окружность вокруг оси колеса 14. Таким образом, осуществляется быстрое перемещение выходного вала 13, связанного с колесом 14, По a гнaлy с датчика обратной связи вал
16 которого соединен с выходным валом 13, отключается давление от полости 3 и включается коммутация пневмоприводов 18, соответствующая вращению выходного вала против часовой стрелки. Шарик останавливается (при необходимости остановку шарика можно ускорить, подавая давление в канал 5J, и давление подается в бесштоковую полость одного из пневмоприводов 18. Шток этого пневмопривода пркжимает венец колеса 8 к колесу 14. ,Цпя дальнейшего поворота выходного вала 13 против часовой стрелки необходимо подать давление в бесштоковую полость пневмопривода, расположенного от пре- дьщущего в направлении также против часовой стрешки и т.д. Таким образом, осуществляется ползучая скорость и шаговый режим работы устройства. При достижении точка позиционирования (.требуемого углового положения)
0
5
0
5
0
5
осуп;ествляется релейшлй следя1Щ1Й режим за счет коммутации соседних пневмоприводов. Следует отметить, что в случаях, при которых не требуется высокоточное позиционирование, или в случаях, при которых возможен дискретный режим работы, устройство может осуществлять дискретное позиционирование только за счет пневмоприводов, аналогичное позиционированию по жестким упорам.
Формулаизобретения
Привод поворота преимущественно для звеньев манипулятора, содержащий установленное в корпусе с возможностью перемещения в радиальных направлениях основное зубчатое колесо внутреннего зацепления, двигатель его пере-
5
0
мещения и дополнитепьное зубчатое г колесо, установленное в корпусе с возможностью вращения и расположенное внутри основного зубчатого колеса с возможностью взаимодействия с зубьями его венца, отличаю щий- с я тем, что, с целью расширения технологических возможностей за счет обеспечения дополнительных режимов работы привода, он снабжен дополнительными двигателями, выполненными в виде силовых цилиндров, закрепленных на корпусе и расположенных вокруг основного зубчатого колеса в радиальном направлении с возможностью взаимодействия их щтоков с этим колесом, а основной двигатель выполнен в виде щарикового вибратора, корпус которого закреплен на основном зубчатом колесе.
А-А
Редактор И.Горная
Составитель Ф.Майоров Техред И.Попович
Заказ 3003/13 Тираж 952
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий J13035, Москва, Ж-35, Раушская наб., ,д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
Фиг.Ъ
Корректор А.Ильин
Подписное
| название | год | авторы | номер документа |
|---|---|---|---|
| Швейный полуавтомат для шитья по контуру | 1989 |
|
SU1730280A1 |
| ПРИВОДНОЕ УСТРОЙСТВО АНТЕННЫ И АНТЕННА | 2016 |
|
RU2700040C1 |
| Поворотное устройство платформы подъемно-транспортного средства | 1982 |
|
SU1065332A1 |
| Автоматическая револьверная головка | 1984 |
|
SU1194590A2 |
| ПРИВОД СКВАЖИННОГО НАСОСА | 2007 |
|
RU2353807C2 |
| ДУБЛИРОВАННЫЙ ВОЛНОВОЙ ПРИВОД | 2008 |
|
RU2377456C1 |
| РУЧНАЯ ТАЛЬ | 1992 |
|
RU2026262C1 |
| Механический пресс | 1987 |
|
SU1497049A1 |
| Устройство для клеймения | 1980 |
|
SU902902A1 |
| Автоматическая револьверная головка металлорежущего станка | 1980 |
|
SU944803A1 |
Изобретение относится к роботостроению и может быть использовано при точном позиционировании и отработке траектории рабочим органом ма- ш-тулятора. Целью изобретения является расширение технологических возможностей за счет обеспечения дополнительных режимов работы привода. Быстрое перемещение осуществляется колебаниями, создаваемыми шариковым вибратором 2, а ползучая скорость и шаговый режим - по сигналу с датчика обратной связи 17 пневмопри- 18 возвратно-поступательного перемещения. Шариковый вибратор и пневмоприводы возвратно-поступательного перемещения кинематически связаны с преобразователем плоскопараллельных круговых колебаний во вращательное движение зубчатого колеса 14 и связанного с ним вала 13. 3 ил. 8 (7 Л J5 3
| Вестник машиностроения, 1968, № 5, с | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
