При нримено-нии известных способов улравления автолдшом, работающим в схеме реверсивного электропривода, с помощью контроллера и реле компенсационная способность автодипа сводится к нулю, так как при одной полярности он работает с опережающим cos ф, а при другой г отстающим.
Отличительная особенност П1)едлагаемого способа заключается в том, что при. переходных процессах пень обратной связи отключается, а обмотка управления включается на пезависимое питание контактами реле питаемого черсз диоды и контроллер от продольных П1еток автодина.
Это позволяет обеспечить работу машины с ()нережак)Н1им током при обеих полярностях выходного напряжения.
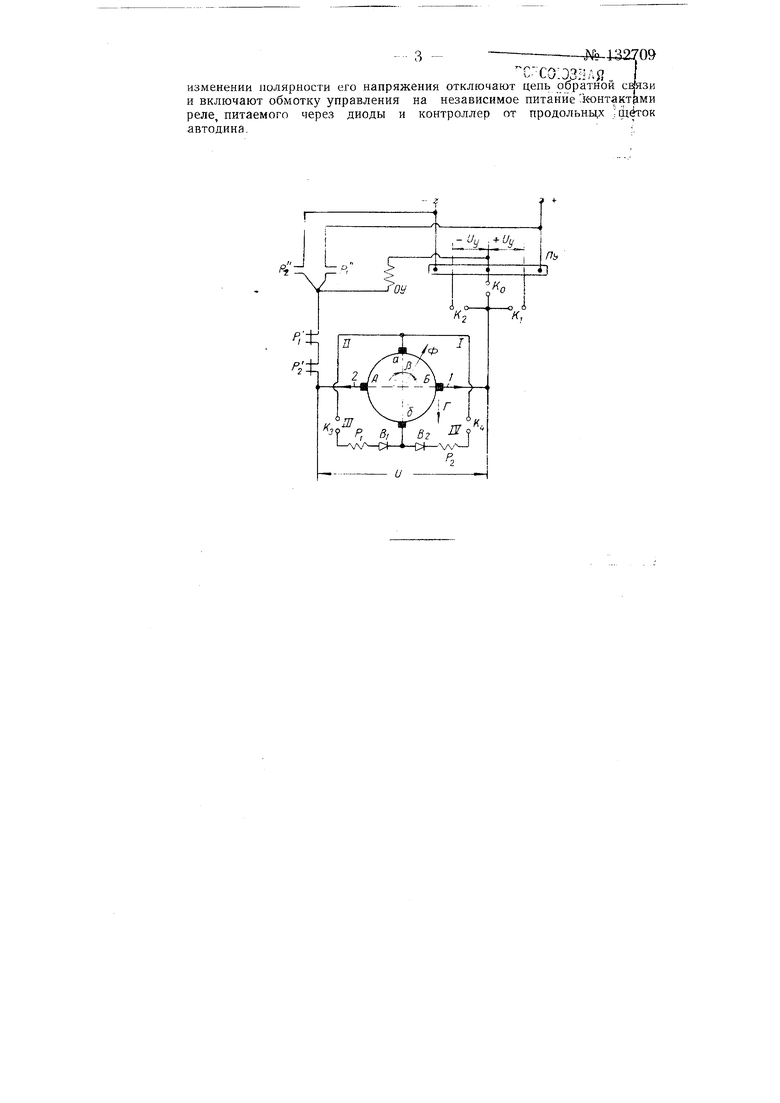
На чертеже изображена электрическая схема для осуп1ествления предлагаемого способа.
Составными элементами схемы яв,ляются; ОУ обмотка управления автодина; потенциометр управления; KQ, К, Къ Kz и - контакты контроллера; PI и Р-2 - реле; Р/, P|. Р/ и Р контакты соответствующих реле; В-, п Во --вентили; А и В -поперечные (рабочие) 1цетки автодина; о и б продольные (вспомогательные) идетки автоднна.
Для пуска автодина контроллер устанавливается в положени1 .«пуск. При этом контакт К контроллера замыкается, а контакты К, К . К:; и размыкаются. По достижении ротором автодина синхронной скорости поток Ф устанавливается при р 90° или 270°, гдс (3 - УГОЛ векто ра потока Ф с осью ординат.
Если после пуска автодина поток Ф устанавливается при р 90 (положение / вектора Ф па чертеже) и контроллер переводится из положения «пуск в положение «вперед, контакты /Cj и замыкаются, а коптакты Ко. К-2 и К. размыкаются. Реле PI не срабатывает, так как вентиль /i запирает его непь. Поток Ф поворачивас тся против часовой
№ 132709-- 2
стрелки II устанавливается в квадранте /. когда напряжение 6 равно напряжению . На рабочих щетках автодина устанавливается напряжение заданной величины и полярности при нахождении потока в емкостном квадранте (cos ф опережающий).
Если поток Ф устанавливается при том же угле |3, но контроллер переводится из положения «пуск в положение «назад, контакты К/ и К, замыкаются, а контакты Ко, К и /Сз размыкаются. Срабатывает реле , размыкая свой контакт PZ и замыкая контакт PZ- При зтом обмотка управления получает независимое питание, создавая намагничивающую силу, направленную по стрелке Г. Поток движется в направлении часовой стрелки и проходит квадрант IV. Так как собственная обратная евязь автодина при этом не действует, то вектор потока, поворачиваясь, проходит положение, при котором , и по инерции попадает в квадрант ///.
Реле Ру. настраивается так. чтобы срабатывание контактов при его отпускании происходило в тот момент, когда поток попадает в квадрант /// (Uопт близко к нулю). При зтом контакт РЧ замыкается, а PZ размыкается. Замыкание контакта Р-/ происходит тогда, когда Ф находится в квадранте ///; поэтому поток останавливается в этом квадранте., когда у„„ На рабочих щетках устанавливается напряжение обратной полярности, но поток находится в емкостном квадранте.
Если же после пуска автодина поток устанавливается при (положение 2 па фиг, 1), процесс при переводеконтроллера из положения «пуск в положение «вперед или в положение «назад протекает аналогично случаю, когда . и поток устанавливается соответ ственно в квадранте / или ///.
При переходе потока в квадрант / вектор Ф проходит квадрант // и положение, при котором угол .
Таким образом, при пуске автодина в любом случае обеспечивается получение напряжения той или иной полярности при нахождении потока в емкостных квадрантах, т, е. машина работает с опережающим cos ф.
При прямом реверсировании автодина, когда контроллер переводится нз положения «вперед в положение «назад, размыкаются контакты и /Сз и замыкаются контакты Kz и К.. Срабатывает реле PZ и обмотка управления получает независимое питание. Поток, двигаясь в направлении часовой стрелки, проходит квадранты / и /У и вследствие отключения реле PZ останавливается в емкостном квадранте ///,
При обратном реверсе автодина, т, е, при переводе контроллера из положения «назад в положение «вперед, процесс протекает аналогично прямому реверсу автодина.
Следует отметить, что процесс реверсирования автодина происходит при своеобразной форсировке приводного двигателя постоянного тока, так как при изменении выходного напряжения автодина от +U до -U максимальное напряжение достигается при (, а при изменении напряжения от -U до +U максимум достигается прир 0°. Такая форсировка для некоторых реверсивных электроприводов (электропривод строгального станка, реверсивного прокатного стана и пр,), является положительным фактором, так как она приводит к сокращению продолжительности цикла.
Предмет и ,i о б р е т е н и я
Способ управления автодином. работающим в схеме реверсивного электропривода, с помощью контроллера и реле, отличающийся тем, что, с целью обеспечения работы машины с опережающим током при обеих полярностях выходного напряжения, при пуске автодина и изменении полярности его напряжения отключают цепь обратной снязи
и включают обмотку управления на независимое питание контактами реле, питаемого через диоды и контроллер от продольны ;й1ёток автодина.
(: / / - Г) -, ,
ь-1-о..Я „ , 
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения и наблюдения угла поворота магнитного потока в регулируемых одноякорных преобразователях | 1960 |
|
SU131823A1 |
| СПОСОБ ПИТАНИЯ ЭЛЕКТРИЧЕСКИХ ПОТРЕБИТЕЛЕЙпостоянного ТОКА от | 1964 |
|
SU165225A1 |
| Электропривод переменного тока | 1987 |
|
SU1473062A1 |
| Электропривод переменного тока | 1988 |
|
SU1621137A1 |
| Способ торможения электропривода переменного тока и устройство для его осуществления | 1983 |
|
SU1234938A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РЕВЕРСИВНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 1991 |
|
RU2011285C1 |
| Электропривод | 1987 |
|
SU1418877A1 |
| Электропривод | 1985 |
|
SU1324087A1 |
| Электропривод роторного экскаватора | 1988 |
|
SU1717731A1 |
| Двухдвигательный электропривод для рудничной подъемной установки | 1985 |
|
SU1427534A1 |