Изобретение относится к измери тельной технике,, конкретнее к средствам измерения угловых скоростей, и может найти применение в машиностроении и приборостроении. Известно устройство измерения угловой скорости, содержащее датчик угловой скорости, устройство квантования периода и блок преобразования периода информативного сигнала в число, пропорциональное скорости вра щения. Принцип действия такого устройства основан на подсчете импульсов опорной частоты от образцового кварцевого генератора за промежуток времени Т между двумя или несколькими импульсами от датчика с последующим преобразованием период - угловая ско рость. При нормировании динамической погрешности такого устройства сущест венно уменьшается верхний предел измерения угловой скорости. Для его расширения необходимо автоматически переключать пределы измерения, что приводит к усложнению схемы прибора и сохраняет его функциональные возможности на том же уровне lj. Однако такое устройство снабжено датчиком угловой скорости с низкой разрешающей способностью, что снижает его динамическую точность. Наиболее близким к изобретению по технической сущности является цифровой тахометр, содержащий микро-ЭВМ, переключатель сигналов запус ка и последовательно соединенные . контактор, электродвигатель, растровый датчик угловых перемещений, схему управления .при этом второй выход контактора подключен к первому входу переключателя сигналов запуска, выхо которого соединен с вторым входом ,€хемы управления t23. -Такое устройство реализует метод квантования периода информативного сигнала с последующим вычислением по указанному в статье алгоритму угловой скорости. Несмотря на то, что датчик имеет вью-окую разрешающую способность (Z 10800), точность такого устройства низкая. Это обуславливается тем, что в динамическом режиме работы (при снятии характеристик разбега) погрешность такого тахометра определ етсй двумя составляю щими - погрешностью дискретности и погрешностью усреднения скорости 1 8J на рути 2jr/Z (Z - число штрихов круговой периодической.меры дискретного преобразователя угла). Причем первая составляющая погрешности особенно проявляется в области высоких измеряемых скоростей вращения, а вторая в области низких и зависят они от Z. Увеличение разрешающей способности приводит к уменьшению погрешности усреднения (начальный участок характеристики разбега) и к увеличению погрешности дискретности (установившийся режим), и, кроме того, в этом же режиме возрастает избыточность информации, а зто приводит к необходимости увеличения объема запоминающего устройства микро-ЭВМ, увеличению времени обработки всей полученной информации. Этот недостаток можно было бы устранить путем использования датчика с высокой разрешающей способностью с последующим делением частоты, информативного сигнала (переключение диапазонов измерения). Но число переключателей невелико, а значит погрешность изменяется в широких пределах. Однако датчики с высокой разрешающей способностью и фиксированным Z имеют ограниченный верхний предел измерения угловой скорости. Фиксированное значение Z приводит к возникновению еще одной составляющей динамическбй погрешности,обусловленной заменой объекта измерения,так как не существует одинаковых объектов даже среди объектов заданной номенклатуры. Например, если к цифровому тахометру, обладающему какой-то определенной динамической погрешностью, подключить злектродвигатель с более низкой постоянной времени, то динамическая погрешность возрастает, и наоборот, увеличение постоянной времени объекта измерения приводит к уменьшению динамической погрешности и к повьш1ению избыточности информации. Из зтого следует, что для минимизации динамической погрешности необходимо изменять разрешающую способность датчика. Цель изобретения - повышение разрешающей способности и уменьшение избыточности информации. Поставленная цель достигается тем, что в цифровой тахометр, содержащий микро-ЭВМ, переключатель сигналов запуска и последовательно соединенные контактор, электродвигатель, растровый датчик угловых перемещений, схем управления, при этом второй выход ко тактора подключен к первому входу пе реключателя сигналов запуска, выход которого соединен с.вторым входом cx мы управления, введены компаратор, преобразователь код-напряжение, постоянное запоминающее устройство, .счетчик адреса, управляемый делитель частоты, триггер, схема совпадения, устройство квантования периода, буф«рный регистр, вычислительное устройство, причем второй выход растрового датчика угловых перемещений подключен к первому входу компаратоpa, выходом соединенного с третьим входом схемы управления, первый выход которой подключен к первому входу буферного регистра, а через устройство квантования периода - к первому входу микро-ЭВМ и к первому входу вычислительного устройства, выходом соединенного с вторым входом буферного регистра, выход которого подключен к второму входу микро-ЭВМ, к второму входу вычислительного устройства и к первому входу управляемо го делителя частоты, выходом соединенного с четвертым входом схемы управления, второй выход которой под ключен к второму входу устройства квантования периода и к первому входу схемы совпадения, третий и четвер тый выходы схемы зшравления соединены с входами триггера, выходом подключенного к второму входу схемы сов падения, выход которой соединен с вторым входом управляемого делителя частоты, а через последовательно соединенные счетчик адреса, постоянное запоминающее устройство и преобразователь код-напряжение - с вторым входом компаратора, при этом первый выход растрового датчика угловых перемещений подключен к второму входу переключателя сигналов запуска, выходом соединенного с третьим входом микро-ЭВМ. На фиг, 1 представлена структурная схема предлагаемого устройства; на фиг. 2 - его временные диаграммы. Цифровой тахометр содержит контактор 1, электродвигатель 2, раст- ровый датчик 3 угловых перемещений, компаратор 4, схему 5 управлений, устройство 6 квантования периода, микро-ЭВМ 7, схему 8 совпадения, триггер 9, счетчик 10 адреса, постоянное запоминающее устройство 11, преобразователь 12 код-напряжения, управляемый делитель 13 частоты, буферный регистр 14, вычислительное устройство 15 и переключатель 16 сигнала запуска. Контактор 1 вторым выходом подключен к переключателю сигнала запуска, выход которого соединен со схемой 5 управления и микро-ЭВМ 7, а первым выходом контактор 1 подключен к электродвигателю 2, вал которого сочленен с осью модулятора растрового датчика 3 угловых перемещений, имеющего два выхода. Выход 2 основной информативный выход (выхсд sin-сигнала) соединен с одним из входов компаратора 4, выход которого подключен к основному входу (вх.З) схемы 5 управления. Выход растрового датчика 3 (выход cos-сигнала) подключен к переключателю 16 сигнала запуска и к первому входу (вх.1) схемы 5 управления. Выход 1 схемы упр.авления является информативным ее выходом, подключен к одному из входов устройства 6 квантования периода, к второму входу которого подключен второй выход (вых. 2) -выход опорного сигнала схемы 5 управления. Устройство 6 квантования периода своим выходом подключено к одному из входов микро-ЭВМ, а также к одному из входов вычислительного устройства 15, выход которого соединен с вторым входом буферного регистра, первый вход которого подключен к выходу 1 (вых.О схемы 5 управления. Кроме того, вторые входы микро-ЭВМ 7, вычислительного устройства 15, а также кодовый вход управляемого делителя 13 частоты подключены к выходу буферного регистра 14. Второй вход управляемого делителя 13 частоты, а также вход счетчика 10 адреса подключены к выходу схемы совпадения, один вход которой подключен к второму выходу (вых. 2) схемы управления, а второй ее вход соединен с выходом триггера 9, входа1Ф1 подключенного к третьему и четвертому выходам схемы 5 управления. Выход управляемого делителя частоты соединен с четвертым входом (вх. 4) схемы управления. Счетчик 10 адреса, постоянное запоминающее устройство 11 и преобразователь 12 код-напряжение соеинены последовательно, а выход последнего подключен к второму входу -мпаратора. Контактор 1 служит для
одновременного запуска исследуемого электродвигателя 2, микро-ЭВМ 7 и ее устройства сопряжения с датчиком 3.
Переключатель сигнала запуска служит для управления работой всего уст ройства. Коэффициент его пересчетног устройства выбирается таким, чтобы полностью заполнить отведенные ячейки ОЗУ микро-ЭВМ информацией о периодах информативного сигнала.
Устройство работает в два такта. В первом такте происходит квантование периодов информативного сигнала датчика и запись информации в ОЗУ микро-ЭВМ. Квантование начинается по получении сигнала от схема 16 одновременно с включением электродвигателя.. Счетчик переключателя сигнала запуска считает число периода на втором выходе растрового датчика. Импульс переполнения счетчика переключателя сигналов запуска поступает на схему 5 управления и прекращает квантование периодов сигнала датчика, а также поступая на микро-ЭВМ дает команду на обработку информации. вычисление по заданному алгоритму значений угловой скорости, динамического момента, т.е. разрешение на начало второго такта работы.
Первый такт работы цифрового та,хометра. .
Информативный сигнал синусоидальной формы () с второго выхода датчика 3 поступает.на одинИз вх-одов компаратора 4, где осуществляется его неравномерное квантование с целью преобразования крутизны синусоиды, которая изменяется с изменением измеряемой скорости, в частрту следования импульсов. Это позволяет повысить разрешающую способность цифрового тахометра. Напряже ше Uj, сравнивается с выходным напряжением преобразователя 12 код-напряясение (ПКН) при помощи компаратора 4. Уровни напряжения ПКН соответствуют значениям сигнала U sinM через 7Г/9, т.е.
} Un т sin 2JTf9
. и Т|Д. Входные коды ПКН, обеспечиващие значения U, лг 1гч задаются при помощи поетояниого запоминающего устройства ПЗУ tt.Адресные входы ПЗУ подключены к счетчику 10 адреса Для реализации непрерьюного кванточанияЕ сигнала U, с выхода компаратора 4 на вход счетчика 10 адреса через схему 5 управления заведена цифровая положительная обратная связь. При совпадении каждого уровня выходного напряжения КПН с напряжением Ц на выходе компаратора появляется импульс, т.е. происходит преобразование крутизны синусоидального сигнала в частоту. Эта последовательность импульсов поступает на второй вход схемы 5 управления и проходя ее подается на устройство 6 квантования периода, а на первый вход схемы 5 управления с второго выхода датчика 3 подается сигнал прямоугольной формы, сдвинутьЕЙ относительно и На л/2 Это необходимо для различия четвертей периода .сигнала и .Кроме того, перепад напряжений на выходе компаратора 4 формируется формирователями Ф1 и Ф2, входящими в схему 5 управления, в зависимости от значения и,и| со8Чи управляет работой триггера 9. Последний устанавливается в состояние условной 1, открывая схему 8 совпадения, и импульсы от генератора опорной частоты, входящего в схему 5 управления, с второго ее выхода поступают на счетчик 10 адреса. Каждый прошедший через схему 8 совпадения импульс устанавливает счетчик 10 в новое состояние, а триггер 9 в состояние условного О. Таким образом, замыкая цепь обратной связи, производят умножение информативного сигнала в 18 раз.Периоды этого сигнала; квантуются опорной частотой (,(вых.2 схемы 5 управления) в схеме 6 квантования периода, и коды подаются в микро-ЭВМ 7, а также в вычислительное устройство 15, в котором осуществляется определение разрешающей способности датчика на основе информации о динамических характеристиках объекта измерения.
Алгоритм работы вычислительного устройства определяется следующим образом. В процессе разбега электродвигателя скорость вращения его вала изменяется по такому закону:
nli)n,() ,
где Пр - скорость вращения при установившемся режиме работы; f - электромеханическая постоянная времени электродвигателя;.
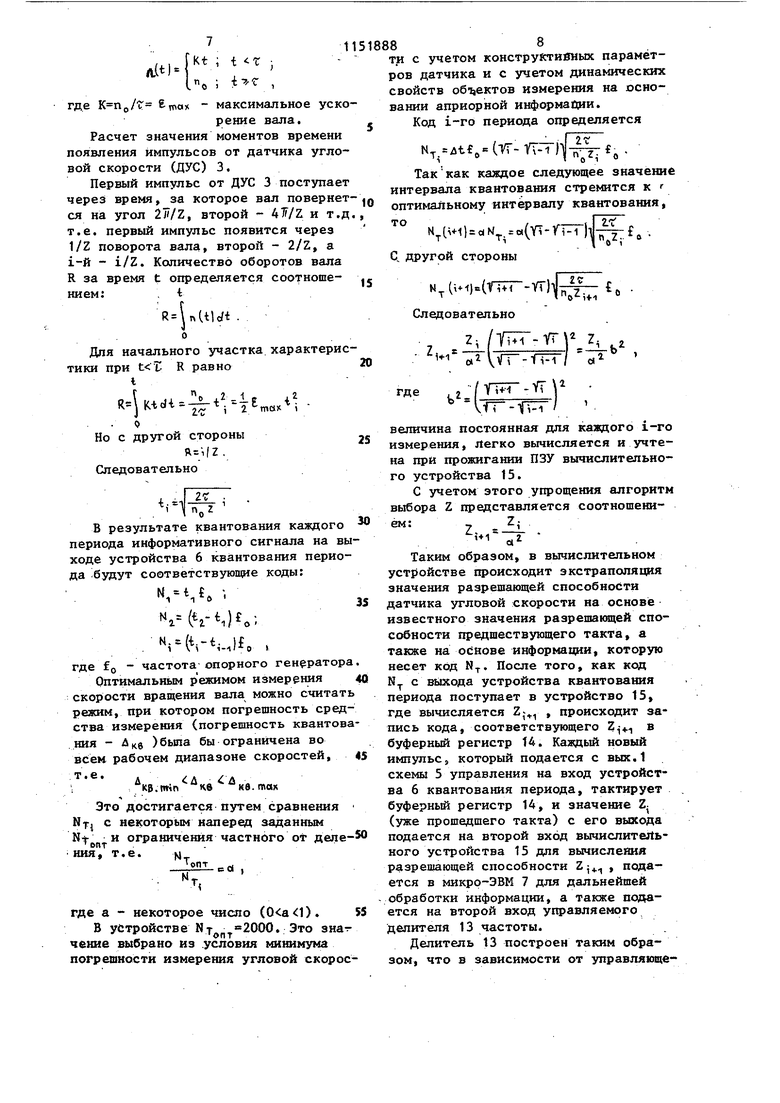
Эта зависимость может быть апроксимированаKt ; t t ) bo ; i , где К По/1Г 0% - максимальное уско рение вала. Расчет значения моментов времени появления импульсов от датчика угловой скорости (ДУС) 3. Первый импульс от ДУС 3 поступает через время, за которое вал повернет ; -/„„ / 1Г/-7 ся на угол 2II/Z, второй - Af/Z и т.д т.е. первый импульс появится через 1/Z поворота вала, второй - 2/Z, а i-й - i/Z. Количество оборотов вала R за время t определяется соотношением: t R JnUlc/t . Для начального участка характерис тики при R равно t ..,ni Но с другой стороны (Z, Следовательно П В результате квантования каждог периода информативного сигнала на ходе устройства 6 квантования пери да будут соответствующие коды: N. t «л -. а (4-)0-. (S-4Jfo где fo - частота опорного генерато Оптимальным режимом измерения скорости вращения вала можно счита режим, при котором погрешность ср ства измерения (погрешность квант ния - Дкв )бьта бы ограничена во вс:ем рабочем диапазоне скоростей, т.е. . л/А KB. nrin кв кв. тох Это достигается путем сравнения NTJ с некоторым наперед заданным Nt и ограничения частного от дел ния, т.е. опт где а - некоторое число (). В устройстве . Это зн чение выбрано из .условия минимума погрешности измерения угловой скор 88 ТИ с учетом конструктивных параметров датчика и с учетом динамических свойств обтаектов измерения на основании априорной информации. Код i-ro периода определяется NT. At, (YT-УГ-Т)-|5 . л«01 Таккак каждое следующее значение интервала квантования стремится к f оптимальному интервалу квантования, . N,Ml dN. «(YT-fi-1JT| :f,. Q другой стороны N,(.M,.(rur-Vr), Следовательно z, ,:/гйт--уг Ь - I J-T- .1 . /1 1 1 -ll-1 неличина постоянная для каждого 1-го измерения, легко вычисляется и учтена при прожигании ПЗУ вычислительного устройства 15. С учетом этого упрощения алгоритм выбора Z представляется соотношениZ .11ем: «г Таким образом, в вычислительном устройстве происходит экстраполяция значения разрешающей способности датчика угловой скорости на основе известного значения разрешакицей способности предшествующего такта, а также на основе информации, которую несет код N.. После того, как код N. с выхода устройства квантования периода поступает в устройство 15, где вычисляется Zj , происходит запись кода, соответствующего . в буферный регистр 14. Каждый новый импульс, который подается с вых.1 схемы 5 управления на вход устройства 6 квантования периода, тактирует буферный регистр 14, и значение Z(уже прошедшего такта) с его выхода подается на второй вход вычислительного устройства 15 для вычисления разрешающей способности Z. , подается в микро-ЭВМ 7 для дальнейшей обработки информации, а также поддается на второй вход управляемого делителя 13 частоты. Делитель 13 построен таким образом, что в зависимости от управляюще911го кода поступающего с выхода буферного регистра 14, делитель выдает j импульсов, таким образом осуществля ется измерение разрешающей способности устройства в соответствии с тре буемым алгоритмом. Мгновенные значения угловой скорос ти вь1числяются в микро-ЭВМ на основе HZ. информации NT, к где fo . Чтобы не загромождать память микро-ЭВМ при вычислении экстраполирован ного значения разрешающей способности тахометра использовано вычислитель ное устройство 15. Использование такого тахометра позволит повысить разрешающую способность в 18 раз. Изменение разрешающей способности датчика позволяет поддерживать заданную погрешность во всем диапазоне измерения. 88 Погрешность измерения угловой скорости определяется двумя составляющими:Устройство имеет более высокую точность. Достоинство устройства заключается в том, что разрешающая способность датчика изменяется в каждом цикле измерения, а не 1-2 раза на весь диапазон измерения. Кроме того, изменение разрешающей способности датчика цифрового тахометра уменьшает избыточность информации. Применение такого тахометра в машиностроении, приборостроении позволит повысить точность измерения угловой скорости,достоверность контроля качества электродвигателя ,что приведет к повышению качества выпускаемой продукции.



| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой тахометр | 1986 |
|
SU1352371A2 |
| Устройство для измерения скорости вращения | 1984 |
|
SU1262385A1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2001 |
|
RU2189625C1 |
| Устройство для измерения параметров вращения | 1986 |
|
SU1613960A1 |
| Способ преобразования скоростей вращения двух валов для измерения соотношения скоростей и устройство для его осуществления | 1989 |
|
SU1636774A1 |
| Устройство защиты памяти | 1987 |
|
SU1474657A1 |
| Устройство для ввода информации | 1983 |
|
SU1109732A1 |
| Устройство для управления роботом | 1983 |
|
SU1228074A1 |
| Генератор опорного кода вентильного преобразователя | 1989 |
|
SU1674330A1 |
| Переносное устройство передачи единицы угла фазового сдвига | 1991 |
|
SU1827641A1 |

ЦИФРОВОЙ ТАХОМЕТР, содержащий микро-ЭВМ, переключатель сигналов запуска и последовательно соединенные контактор, электродвигатель, растровый датчик угловых перемещений, схему управления, при этом второй выход контактора подключен к первому входу переключателя сигналов запуска, вьпсод которого соединен с вторым входом схемы управления, отличающийся тем, что, с целью повышения разрешающей способности и уменьшения избыточности информации, в него введены компаратор, преобразователь код-напряжение, постоянное запоминающее устройство, счетчик,адреса, управляемый делитель частоты, триггер, схема совпадения, устройство квантования периода, буферный регистр и вычислительное устройство, причем второй выход растрового датчика угловых перемещений подключен к первому входу компаратора, выходом соединенного с третьим входом схемы управления, первый выход которой подключен к первому входу буферного регистра, а через устройство квантования периода к первому входу микро-ЭВМ и к первому входу вычислительного устройства, вьгходом соединенного с вторым входом буферного регистра, выход которого подключен к второму входу микро-ЭВМ, к втором - входу вычислительного устройства и к первому входу управляемого делителя частоты, выходом соединенного с четвертым входом схемы управления, второй выход которой подключен к второму входу устройства квантования периода и к первому входу схег-Я) совпадения, третий и четвертый выходы схемы управления соединены с входами триггера, выходом подклюСП ченного к второму входу схемы собпа.дения, выход которой соединен с вто00 QO 00 рым входом компаратора, при этом первый выход растрового датчика угловых перемещений подключен к второму входу переключателя сигналов запуска, выходом соединенного с третьим входом микро-ЭВМ.
SLZ
тмин Illllll
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кирианаки Н.В., Дудыкевич В.Б | |||
| Методы и устройства цифрового измерения низких и инфранизких частот | |||
| Львов, Вища школа, 1975, с | |||
| Двухколейная подвесная дорога | 1919 |
|
SU151A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Экспресс-информация ПЭВТ, 1974, вып | |||
| Приспособление для автоматической односторонней разгрузки железнодорожных платформ | 1921 |
|
SU48A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| / | |||
