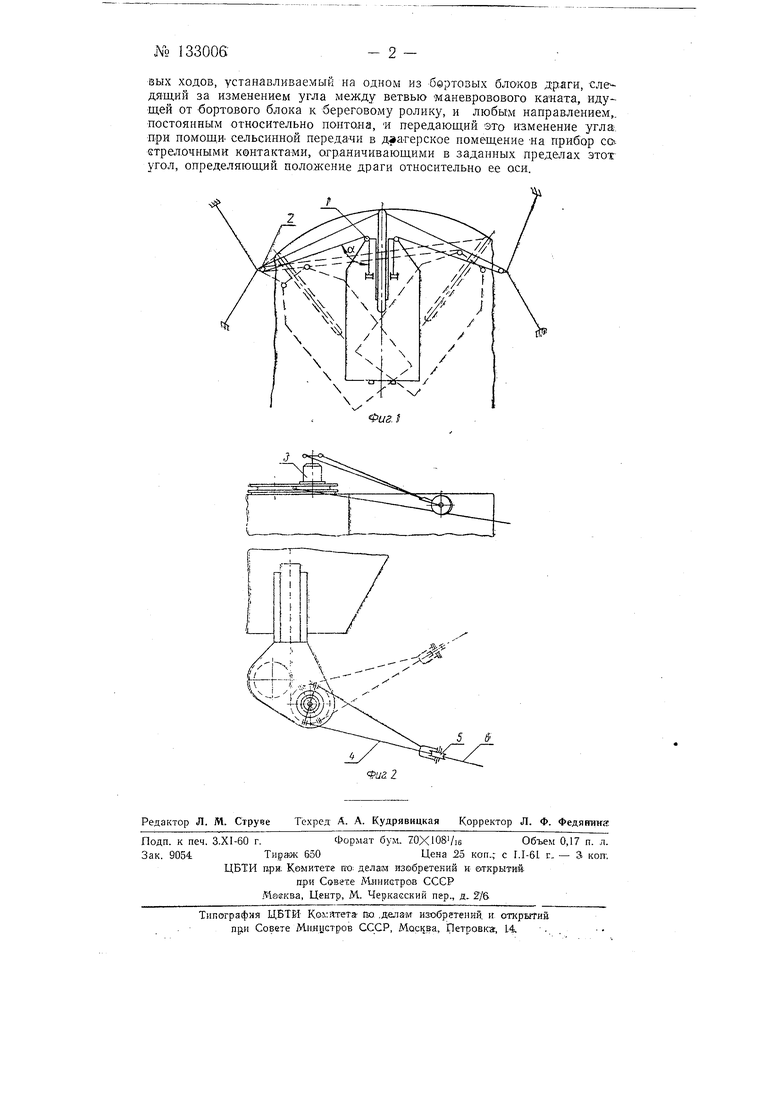
Особенность предлагаемого способа заключается в том, что, с целью ограничения )тла маневрирования драги, применен датчик маневровых ходов. Датчик, установленный на одном из бортовых блоков драги, следит за изменением угла между ветвью маневровового каната и любым направлением, постоянным относительно понтона, и передает это изменение угла посредством сельси-нной передачи в драгерское помещение на прибор со стрелочными контактами. Контакты ограничивают в заданных пределах этот утол, по которому устанавливают положение драги относительно ее оси. На фиг. 1 приведена. схема расположения драги в заоое; на фиг. 2-схемы расположения датчика и взаимодействующих с ним элементов. Положение драги относительно оси забоя определяется углом а между ветвью бортового каната, идущей от бортового блока 1 к береговому ролику 2, и любым направлением, неизменным относительно направления понтона драги. Изменение угла контролируется датчиком маневрового хода, устанавливаемым на носовом блоке. Датчик представляет собой сельсин 3, связанный посредством шарнирного устройства 4 с роликом 5, катящимся по носовому канату 6. При движении драги по забою датчик маневрового хода будет непрерывно следить за углом наклона носового каната. Угловую величину сельсин-датчик непрерывно передает на сельсин-приемник, находящийся в драгерском помещении. При подходе драги к одному из крайних положений в забое срабатывает исполнительный, элемент электросхемы, выключающий привод маневровой лебедки. При включении маневровой лебедки противоположного борта драга движется в другой угол забоя, пока не достигнет крайнего положения. Дальнейшее ограничение маневровых ходов осуществляется автоматически в пределах заданного угла. Предмет изобретения Способ автоматического фиксирования положения драги в отрабатываемом забое, отличающийся тем, что, с целью ограничения угла маневрирования -(разворота) драги, применяют датчик маневровых ходов, устанавливаемый на одном из бортовых блоков драги, сле дящий за изменением угла между ветвью маневровового каната, идущей от бортового блока к береговому ролику, и любы-м направлением,, постоянным относительно понтаиа, и передающий это изменение угла, при помощи сельсинной передачи в даагерское помещение -на прибор со етрелочными контактами, ограничивающими в заданных пределах этот угол, определяющлй положение драги относительно ее оси.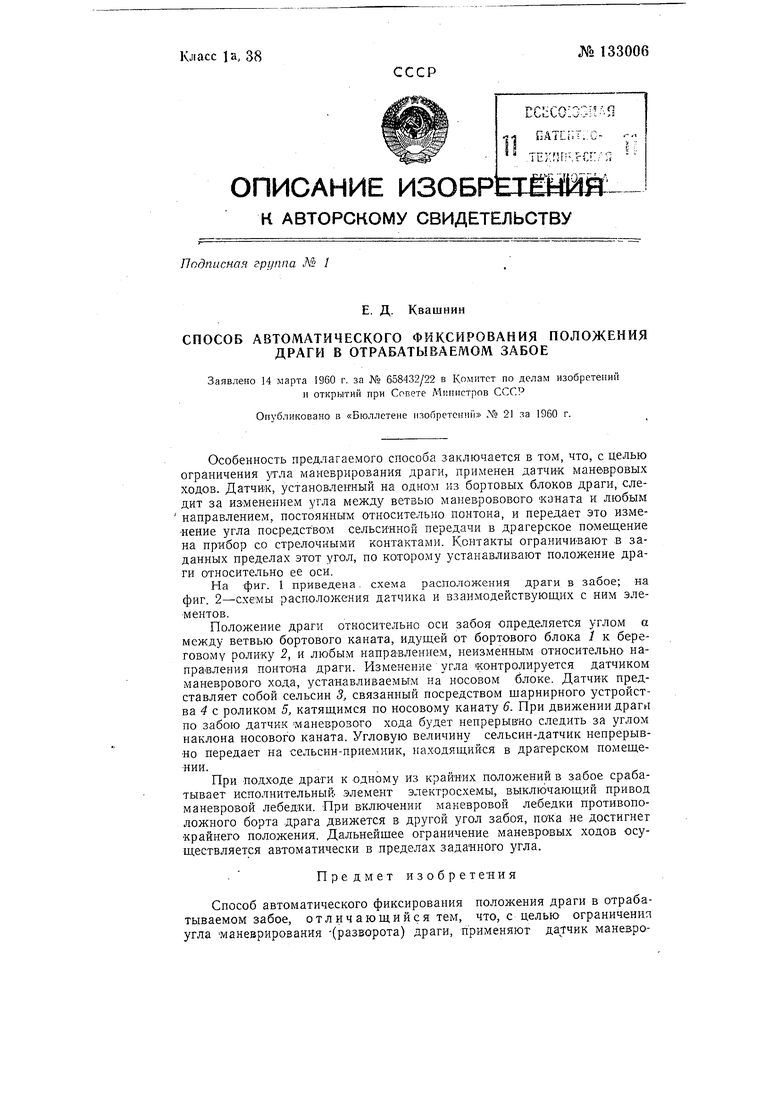
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регистрации ширины дражного забоя | 1982 |
|
SU1082917A1 |
| Устройство для измерения угла разворота свайной драги | 1990 |
|
SU1758172A1 |
| Способ управления и наблюдения за положением свай | 1958 |
|
SU114734A1 |
| Устройство управления положением драги в забое | 1980 |
|
SU870592A1 |
| Способ автоматического фиксирования положения драги в отрабатываемом забое | 1977 |
|
SU697644A1 |
| УСТРОЙСТВО ДЛЯ УСТАНОВКИ КОНТАКТОВ УКАЗАТЕЛЯ МАНЕВРОВЫХ ХОДОВ ДРАГИ | 1969 |
|
SU242796A1 |
| Устройство для бокового перемещения драг и земснарядов | 1981 |
|
SU985197A1 |
| Устройство для дистанционного наблюдения за черпанной цепью драги и защиты ее от схода с нижнего барабана драги | 1959 |
|
SU130426A1 |
| Дражное комплексное устройство | 1979 |
|
SU817154A1 |
| Разгрузочное устройство землеройной машины | 1984 |
|
SU1236104A1 |