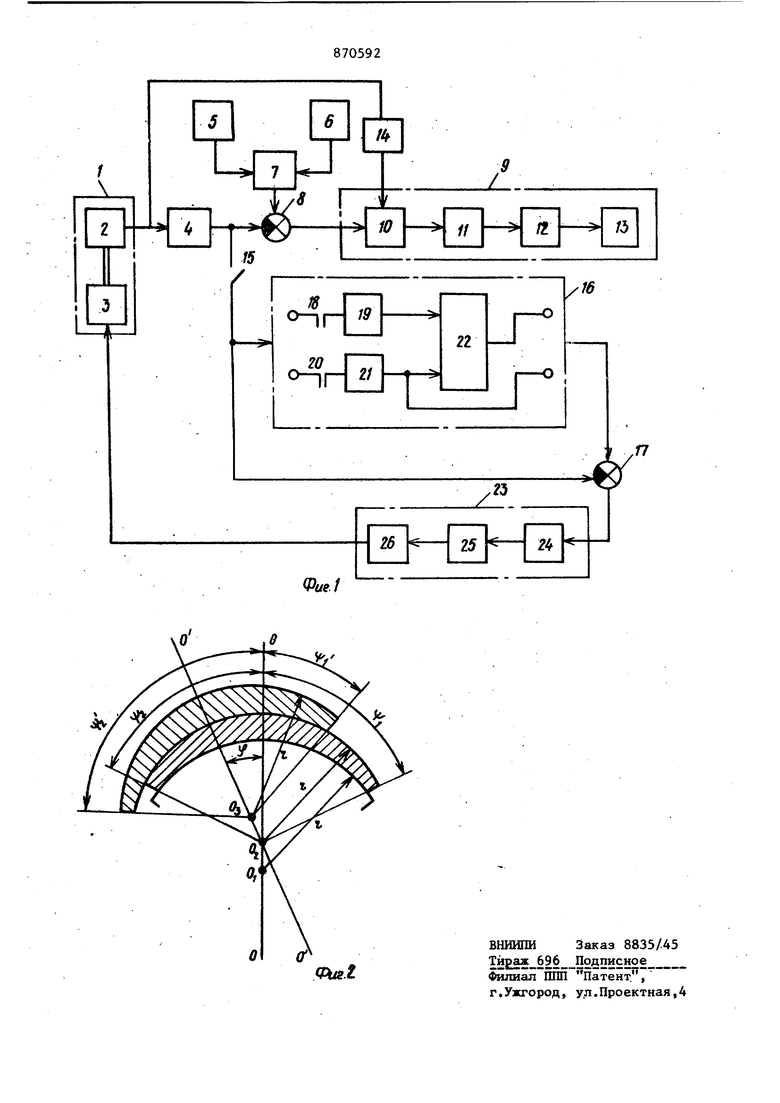
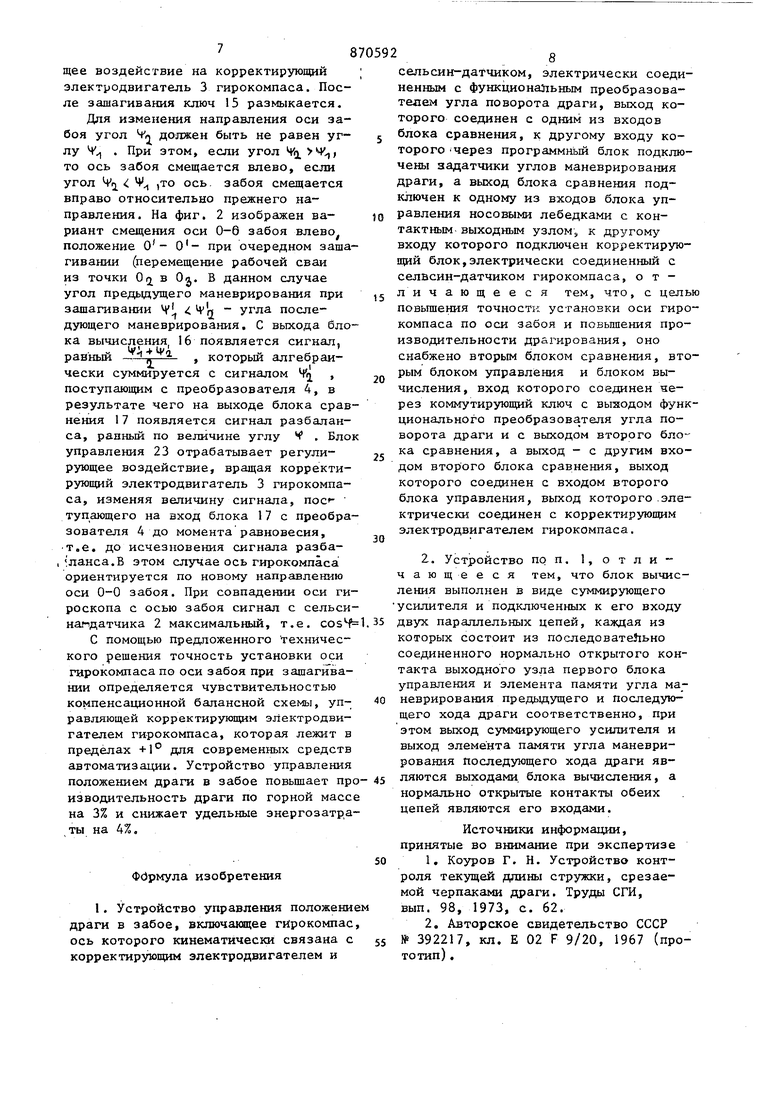
(54) УСТРОЙСТВО УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ДРАГИ . Изобретение относится к областидобычи полезных ископаемых и может найти применение для автоматизации процесса драгирования. Известны устройства, в которых положение плавучего объекта (драги землесосного снаряда и др.) определяется по отклонению его от продольной оси прорези (забоя) с помощ гирокомпаса направления . В указанных устройствах ось забоя определяется визуально, точност определения во многом зависит от ин туиции оператора, что приводит в ко нечном итоге к излишним знергозат-. ратам при формировании границ вьфаботки. Наиболее близкой по технической сущности к предложенному устройству является устройство управления поло жением драги в забое Гз. Устройство содержит гирокомпас, ось которого кинематически связана Б ЗАБОЕ С корректирующим электродвигателем и сельсин-датчиком, электрически соединенным с функциональным преобразователем угла поворота драги в линейную функцию, выход которого соединен с одним из входов блокасравнения, к другому входу которого через программный блок подключены задатчики углов маневрирования драги, а выход блока сравнения подключен к одному из входов блока управления носовыми лебедками в контактных выходных узлах, к другому входу которого подключен корректирую1ций блок, электрически соединенный с сельсин-датчиком гирокомпаса. Устройство содерлмт также датчик оси Прорези. При работе земснаряда на заданном участке вручную устанавливают гироскоп направления по предполагаемой оси прорези, отклонения от которой Ь дальнейшем фиксируются датчиком оси прорези, и через блок утфавле- ния воздействуют на носовые лебедки, 3. приводя земснаряд в заданное положение. . Кроме этого, по заданной программе земснаряд осуществляет периодически повороты (маневры) в обе стороны от заданной оси прорези на величину углов поворота, рпределяемых заданием датчиков углов выхода на бровку. Особенностью технологического режима черпания свайной драгой является зависимость параметров драгирования (длина и ширина стружки) от положения драги относительно оси забоя вследствие серповидности вьфабатывае мого слоя в горизонтальном сечении. Ось забоя в этом случае определяе ся по направлению линии, проходящей через место положения рабочей сваи до и после зашагивания. Длина стружки имеет максимальное значение оси забоя и равна величине зашагивания. По мере удаления драги к бортам забоя длина стружки уменьшается по косинусоИдапьной зави симости от угла поворота драги, что приводит при постоянной скорости боковой подачи к колебаниям ко ФФициента наполнения черпака и производител ности драги. Чтобы сохранить произво дительность постоянной по всей дуге выработки, а процесс резания приблизить к оптимальному скорость боковой подачи непрерывно корректируют в фун ции угла поворота драги. В этой связи требование к точности установки оси гирокомпаса по оси забоя возрас тает. В указанном устройстве 2 положение земснаряда хотя и определяется с помощью специального датчика, одна ко установка оси гирокомпаса произво дится также вручную, вследствие чего точность установки недостаточна. Целью изобретения является повышение точности установки оси гирокомпаса по оси забоя и повышение производительности драгирования. Цель достигается тем, что устройство снабжено вторым блоком сравнени вторым блоком управления и блоком вы числения вход которого соединен через коммутирукяций ключ с выходом фун ционального преобразователя угла поворо;га и с входом второго блока срав нения, а выход - с другим входом вто рого блока сравнения, выход которого соединен с входом второго блока упра Ленин, выходное устройство которого электрически соединено с корректирующим электродвигателем гирокомпаса. При этом блок вычисления выполнен в виде суммирукнцего усилителя и подкЮоченных к нему двух параллельных цепей, каждая из которых состоит из последовательно соединённого нормально открытого контакта выходного узла первого блока управления и элемента памяти соответственно угла маневрирог вания предьщущего и последующего хода драги, при этом нормально открытые контакты обеих цепей являются входом блока вычислителя, а вход суммирующего усилителя и выход элемента памяги угла маневрирования последующего хода драги являются его выходом. На фиг. 1 изображена функциональная схема устройства; на фиг. 2 - геометрическое изображение горизонтального сечения вырабатываемого слоя в дражном забое. Устройство содержит гирокомпас 1, включающий сельсин-датчик 2 и корректирующий ось гироскопа электродвигатель 3. С сельсин-датчиком 2 электрически связан функциональный преобразователь 4, преобразующий косинусоидальную зависимость сигнала сельсиндатчика 2 от угла повррота драги в линейную функцию. Выход преобразователя 4 непосредственно, а выходы за- датчиков 5, 6 углов маневрирования дра.ги через программный блок 7 электрически подключены к блоку сравнения 8. В качестве задатчиков 5, 6 углов маневрирования могут быть использованы, например, пот енциомё рические задатчики напряжения. Выход блока сравнения 8 соединен с одним из входов блока 9 управления носовыми лебедками драги. Блок 9 включает последовательно соединенные уси- , литель 10, фазочувствительный блок 11 и выходное устройство 12, воздействукицее на носовые лебедки 13. Выход сельсин-датчика 2 дополнительно связан через корректирующий блок 14 с другим входом блока 9. Корректирующий блок 14 является составной частЫо системы автоматического регулирования добычного комплекса , драги и осуществляет функциональное воздействие по серповидности вырабатываемого слоя забоя на изменение скорости боковой подачи драги. Кроме этого, функциональный преобразователь 4 соединен через коммутирукщий ключ 15с блоком i 6 вычисления алгебраической полусуммы сигнало углового маневрирования драги при за :шагивании и с входом второго блока сравнения I7, другой вход которого соединен с выходом блока вычисления 16. БЛОК 16 вычисления алгебраической полусуммы сигналов углового маневрирования драги при зашагивании содержит две входньш цепи и две выходные. Одна входная цепь формируется из пос ледовательуо включенных нормально от крытого контакта 18 выходного устрой ства 12, управляющего предыдущим ходом носовой лебедки (например, влево и запоминающего устройства 19, а дру гая входная цепь формируется аналогичной цепью из последовательно вклю ченных нормально открытого контакта 20 выходного устройства 12, управляю щего последующим ходом носовой ле- редки (соответственно вправо , и запоминающего устройства 21. Выходы за поминающих устройств 19 и 21 соединены с входами суммирующего усилителя 22 (например операционного). Выход усилителя 22 формирует один канал вы хода блока 16, а дополнительный выход запоминающего устройства 21 форми рует другой канал выхода блока 16, Выход блока сравнения 17 соединен с. входом второго блока управления 23, включающех о последовательно соединенные усилитель 24, фазочувствительный блок 25 и выходное устройство 26, электрически связанное с корректирующим электродвигателем 3 оси гироскопа. Устройство работает следующим образом. При обычном драгировании на участке выработки с определенной ранее . осью забоя (ось 0-0 на фиг. 2) драга периодически совершает маневры вокруг рабочей связи, забитой в точке 0, осуществляя послойную выработку забоя pazuiycoM г. При этом коммутирующий ключ 15 разомкнут и управление процессом драгирования осуществляется по верхнему контуру функциональной схемы (фиг. 1) , а именно: программный блок 7 по определенной программе подает, сигнал от задатчйков угла маневрирования, например задатчика 5, на вход блока сравнения 8, где Происходит алгебраическое суммирование сигнала задания (левого угла маневрирования) и текущего угла манев.рирования, поступающего от функциокальносо преобразователя 4 угла поворота. Суммарный сигнал усиливается усилителем 10 и через фазочуаствительный блок 1I поступает на выходное устройство 12, которое воздействует на систему управления носовыми лебедками 13, Драга разворач {вается на заданный угол до тех пор, пока сигнал с преобразователя 4 не уравновесит сигнал с программного блока 7 (суммарный сигнал с блока сравнения 8 равен нулю) . Аналогичная ситуация возникает и при движении драги в противоположный угол (правый), величина которого задается задатчиком 6. При этом корректирующий блок 14 автоматически корректирует скорость боковой подачи в функции косинуса угла поворота драги, компенсируя изменения режима резания, вызываемые серповидностью срезаемого слоя. После выработки всего забоя производится очередное затягивание драги. При зашагивании замыкается коммутирующий ключ 15 (вручную или по определенной программе) и драга разворачивается на некоторый угол у ,к ближайшему от рабочей сваи борту забоя (например вправо) . Величина угла Ч произвольна и либо равна заданию, либо устанавливается оператором.вручную. При отработке драгой угла поворота Ч замкнут контакт 18 и на запоминающей устройстве 19 фиксируется значение этого угла. Затем поднимается рабочая свая Iопускается нерабочая свая и драга разворачивается в другую сторону на угол Уд . При этом контакт 18 разомкнут, а контакт 20 замкнут и угол фиксируется на запоминающем устройстве 21. После отработки угла поворота нерабочая свая поднимается, а рабочая опускается. Если угол Ц , то после зашагивания рабочая свая опустится вточку и следовательно ось забоя не изенит своего направления (остается режней 0-0). В этом случае на выоде блока вычисления 16, осуществлящего операцию вычисления i оявляется сигнал, равный значению гла Vij, который компенсируется сигалом противоположного знака,по веичине равным Vrj , который поступает преобразователя 4. В результате этоо на выходе блока сравнения 17 сигал равен нулю, а на выходе блока правления 23 отсутствует управляют щее воздействие на корректирующий электродвигатель 3 гирокомпаса. После зашагивания ключ 15 размыкается. Для изменения направления оси забоя угол Vn должен быть не равен углу Ч . При этом, если угол i % то ось забоя смещается влево, если угол VQ ; ,то ось. звбоя смещается вправо относительно прежнего направления. На фиг. 2 изображен вариант смещения оси О-б забоя влево положение О- О- при очередном заша гивании (перемещение рабочей сваи из точки OQ в Oj. В данном случае угол предыдущего маневрирования при зашагивании Ця - угла последующего маневрирования. С выхода бло ка вычисления, 16 появляется сигнал, равный -3 я , который алгебраически суммируется с сигналом 4 , поступающим с преобразователя 4, в результате чего на выходе блока срав нения 17 появляется сигнал разбаланса, ранный по величине углу V . Бло управления 23 отрабатывает регулирующее воздействие, вращая корректирующий электродвигатель 3 гирокомпаса, изменяя величину сигнала, пос тупающего на вход блока 17 с преобра зователя 4 до момента равновесия, т.е. до исчезновения сигнала разба, {ланса.В этом случае ось гирокомпаса ориентируется по новому направлению оси 0-0 забоя. При совпадении оси ги роскопа с осью забоя сигнал с сельси напдатчика 2 максимальный, т.е. cos4 С помощью предложенного технического решения точность установки оси гирокомпаса по оси забоя при зашагивании определяется чувствительностью компенсационной балансной схемы, управляющей корректирующим электродвигателем гирокомпаса, которая лежит в пределах +1 для современных средств автоматизации. Устройство управления положением драги в забое повьшает пр изводительность драги по горной масс на 3% и снижает удельные энергозатра ТЫ на 4%. Ф)рмула изобретения 1. Устройство управления положени драги в забое, включающее гирокомпас ось которого кинематически связана с корректирующим электродвигателем и сельсин-датчиком, электрически соединенным с Функциональным преобразователем угла поворота драги, выход которого соединен с одним из входов блока сравнения, к другому входу которого Через программньш блок подключены задатчики углов маневрирования драги, а выход блока сравнения подключен к одному из входов блока управления носовыми лебедками с контактным- выходным узлом, к другому входу которого подключен корректирующий блок,электрически соединенный с селвсин-датчиком гирокомпаса, отличающееся тем, что, с целью повышения точности установки оси гирокомпаса по оси забоя и повьш1ения производительности драгирования, оно снабжено вторым блоком сравнения, вторым блоком управления и блоком вычисления, вход которого соединен зерез коммутирующий ключ с выходом функционального преобразователя угла поворота драги и с выходом второго блока сравнения, а выход - с другим входом второго блока сравнения, выход которого соединен с входом второго блока управления, выход которого .электрически соединен с корректирующим электродвигателем гирокомпаса. 2., Устройство по п. 1, о т л и чающееся тем, что блок вычисления выполнен в виде суммирующего усилителя и подключенных к его входу двух параллельных цепей, каждая из которых состоит из последовательно соединенного нормально открытого контакта выходного узла первого блока управления и элемента памяти угла маневрирования предыдущего и последующего хода драги соответственно, при этом выход суммирующего усилителя и выход элемента памяти угла маневрирования последующего хода драги являются выходами, блока вычисления, а нормально открытые контакты обеих цепей являются его входами. Источники информации, принятые во внимание при экспертизе 1.Коуров Г. Н. Устройство контроля текущей длины стружки, срезаемой черпаками драги. Труды СГИ, вып. 98, 1973, с, 62. 2,Авторское свидетельство СССР № 392217, кл. Е 02 F 9/20, 1967 (прототип) .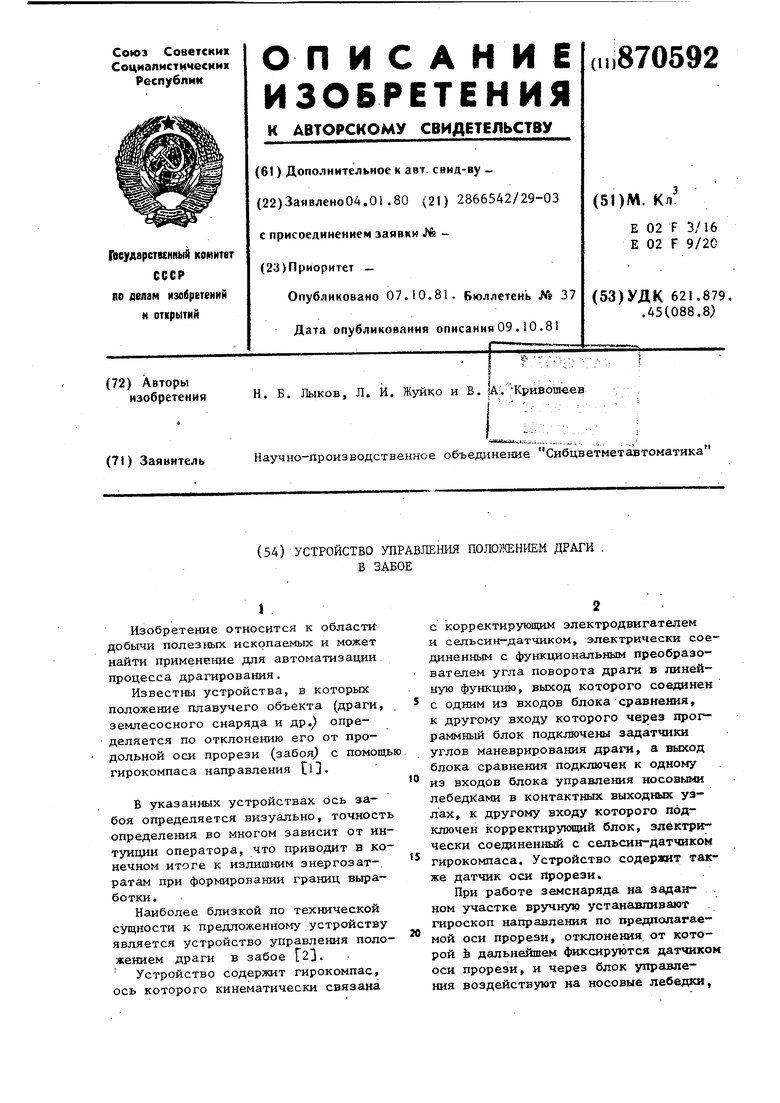
| название | год | авторы | номер документа |
|---|---|---|---|
| Дражное комплексное устройство | 1979 |
|
SU817154A1 |
| Способ управления драгой | 1977 |
|
SU747940A1 |
| Устройство для управления свайным узлом драги | 1983 |
|
SU1102855A1 |
| Прибор для автоматической зарисовки профиля забоя при драпировании | 1975 |
|
SU580277A1 |
| Устройство для измерения угла разворота свайной драги | 1990 |
|
SU1758172A1 |
| Электропривод лебедок носовых канатов драги | 1986 |
|
SU1421827A1 |
| Способ управления и наблюдения за положением свай | 1958 |
|
SU114734A1 |
| Устройство для контроля скорости бокового перемещения свайной драги | 1985 |
|
SU1288273A1 |
| Устройство для регистрации ширины дражного забоя | 1982 |
|
SU1082917A1 |
| Устройство для определения положения драги в забсе | 1977 |
|
SU594252A2 |