Изобретение относится к распозна- вающим устройствам, предназначено для определения формы изменения сигналов на дискретных интервалах време-
U
ни и может быть использовано в адаптивных системах управления.
Цель изобретения - расширение класса распознаваемых сигналов.
На чертеже представлена схема предложенного .устройства.
Устройство содержит дискретизатор 1, логические блоки 2, каждый из которых содержит элемент 3 задержки, сумматор 4, пороговый элемент 5, ком- мутирующие элементы 6 и матрицу контактных пар коммутирующих элементов 7
Устройство работает следующим образом.
Входной сигнал X(t) с помощью дне- кретизатора разбивается на дискретные по времени отсчеты, амплитудные значения которых поступают на вход первого логического блока. В логических блоках последовательно вычисляются разности сигналов
uX(kt) X(kt) - X (k - 1)
(kt) uX(kt) -uX(k - 1)
u X(kt) (kt) X(k- 1) где k 1 ,2 , . . ., N,
проверяются условия соответствия пороговому значению каж,чого логического блока
/и X(kg/ Е; ;
/U X(kt)/ е ,при i 1,2,3,...N,
АОП 1
- зона нечувстви
где О ; ±
тельности пороговых элементов, и формируются сигналы управления коммутирующими элементами.
Матрица 7 состоит из контактных пар k-- коммутирующих элементов 6 логических блоков. Она вьтолнена так, что первые контакты контактных пар первого столбца соединены с шиной пи- тания, а вторые контакты соединены последовательно с контактными парами строк матрицы, вторые контакты контактных пар N-ro столбца являются выходами устройства. В каждом k-M стол-
В1ШИПИ Заказ 3584/51
Проязв.-полигр. пр-тие, г. Ужгород, ул. Проектная, 4
,
1)
g
о 5
0
5
0
5 Q
бце матрицы перпые k контактных пар являются размыкающими, а контактные нары с k-b 1 rjp N - замыкающими.
Появление сигнала на первом, втором или третьем и так далее выходах матрицы свидетельствуют о том, что X(t) имеет постоянную, линейную квадратичную, кубичэскую и так далее форму изменения сигнала.
Формула изобретения
Устройство лля распознавания формы сигнала, содержащее последовательно соединенные дискретизатор, вход которого является входом устройства, и первый логичеср:ий блок, состоящий из элемента задержки, сумматора, порогового элемент 1 и коммутирующего элемента, выход сумматора соединен с входом порогового элемента, вход коммутирующего эл€ мента соединен с выходом порогового элемента, первьш вход сумматора и вход элемента задержки являются входом логического блока, а выход элемента задержки соединен с вторым входом сумматора, выход которого является выходом логического блока, отличающееся тем, что, с целью расширения класса распознаваемых сигналов, в него введена группа дополнительных последовательно соединенных N-1 логических блоков где N - порядок сигнала, причем вход первого логического блока группы соединен с выходом первого логического блока, а контактные пары коммутирующих элементов логических блоков выполнены в виде матрицы N х N, у которой первые контакты контактных пар первого столбца соединены с шиной питания, а вторые контакты соединены последовательно с контактными парами строк матрицы, вторые контакты кон- тактных пар N-ro столбца являются выходами устройства, в каждом k-м столбце матрицы первые k контактных пар являются размыкающими, а контактные пары с k+1 по N - замыкак1щими.
Тираж 672 Подписное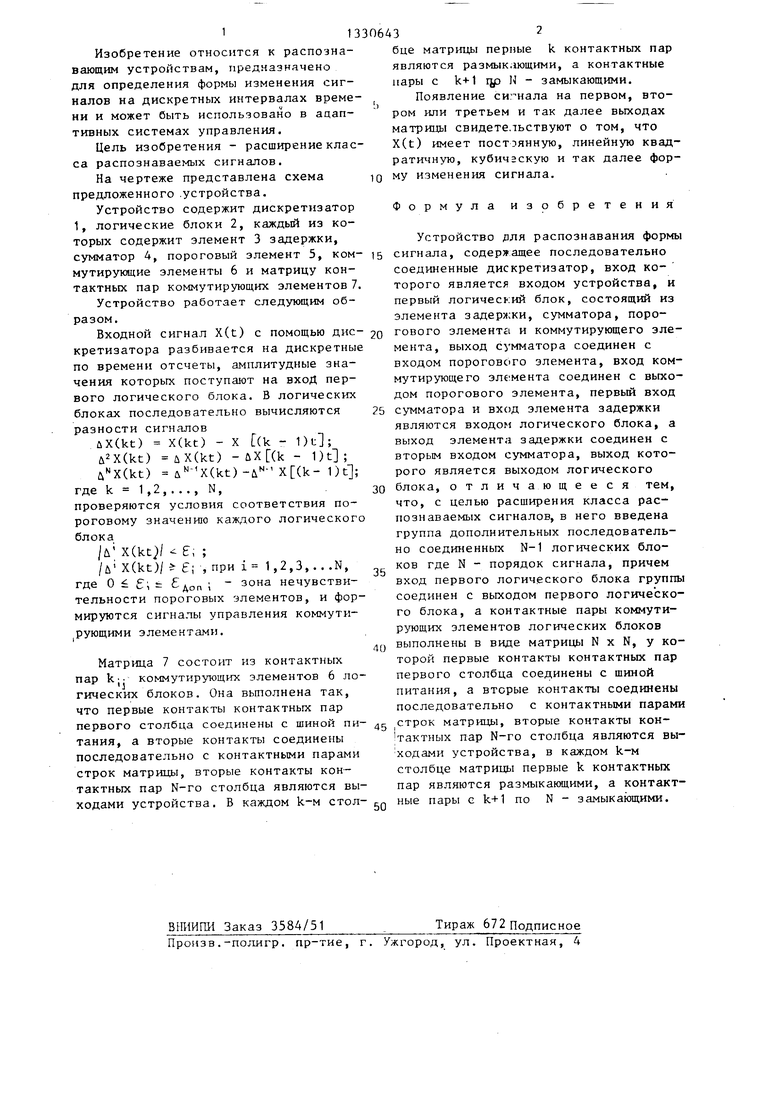
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИДЕНТИФИКАЦИИ ПРОИЗВОДНЫХ ПОЛИНОМИАЛЬНОГО СИГНАЛА | 1990 |
|
RU2006944C1 |
| Устройство ассоциативного распознавания образов | 1985 |
|
SU1330644A1 |
| СПОСОБ ОБНАРУЖЕНИЯ СИГНАЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2169378C1 |
| УСТРОЙСТВО ДЛЯ РАСПОЗНАВАНИЯ ИЗОБРАЖЕНИЯ ОБЪЕКТА | 1992 |
|
RU2054196C1 |
| НЕЙРОПРОЦЕССОР, УСТРОЙСТВО ДЛЯ ВЫЧИСЛЕНИЯ ФУНКЦИЙ НАСЫЩЕНИЯ, ВЫЧИСЛИТЕЛЬНОЕ УСТРОЙСТВО И СУММАТОР | 1998 |
|
RU2131145C1 |
| Система дискретной передачи информации | 2023 |
|
RU2807515C1 |
| Устройство для распознавания формы сигнала | 1986 |
|
SU1536411A2 |
| ПРИЕМНИК ДЛЯ РЕЛЬСОВОЙ ЦЕПИ | 1996 |
|
RU2104199C1 |
| СИСТЕМА ДЛЯ СЖАТИЯ ДВУХМЕРНОГО МАССИВА ИНФОРМАЦИИ | 1993 |
|
RU2046398C1 |
| СИСТЕМА ДИСКРЕТНОЙ ПЕРЕДАЧИ ИНФОРМАЦИИ | 2010 |
|
RU2457543C1 |
Изобретение относится к области распознавания сигналов в адаптивных системах управления. Цель изобретения - расширение класса распознаваемых сигналов. Это достигается введением группы логических блоков 2 и матрицы контактных пар коммутирующих элементов 7, что позволяет определять порядок входного сигнала. 1ш1. -Чч: кц I /г/г (Л Т+А г; Выходы 1 со оо о О5 4 ОО
| Устройство для распознавания сигналов | 1974 |
|
SU546910A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Александровский Н.М | |||
| Адаптивные системы автоматического управления сложными технологическими процессами | |||
| М.: Энергия, 1973, гл | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
