It ioopoifiiiu огноситея к средстнам мсха- iiiKuiUHii 1101 рузичио-разгрузочиых работ и Mo/tU i hiiH I- i-ciio/iiKiOBaHO на .линиях сутки , i()u n pna.iins 11()и обработке длиниомор- мыч i|iv-.iiii при ()Жнисти подхода к мим L боковых сторон, а также в других Do.iar гях (одиого хо:)ЯЙства.
Ноль и (обретения облегчение ногру- ,очно-ра:л-ручочных операций.
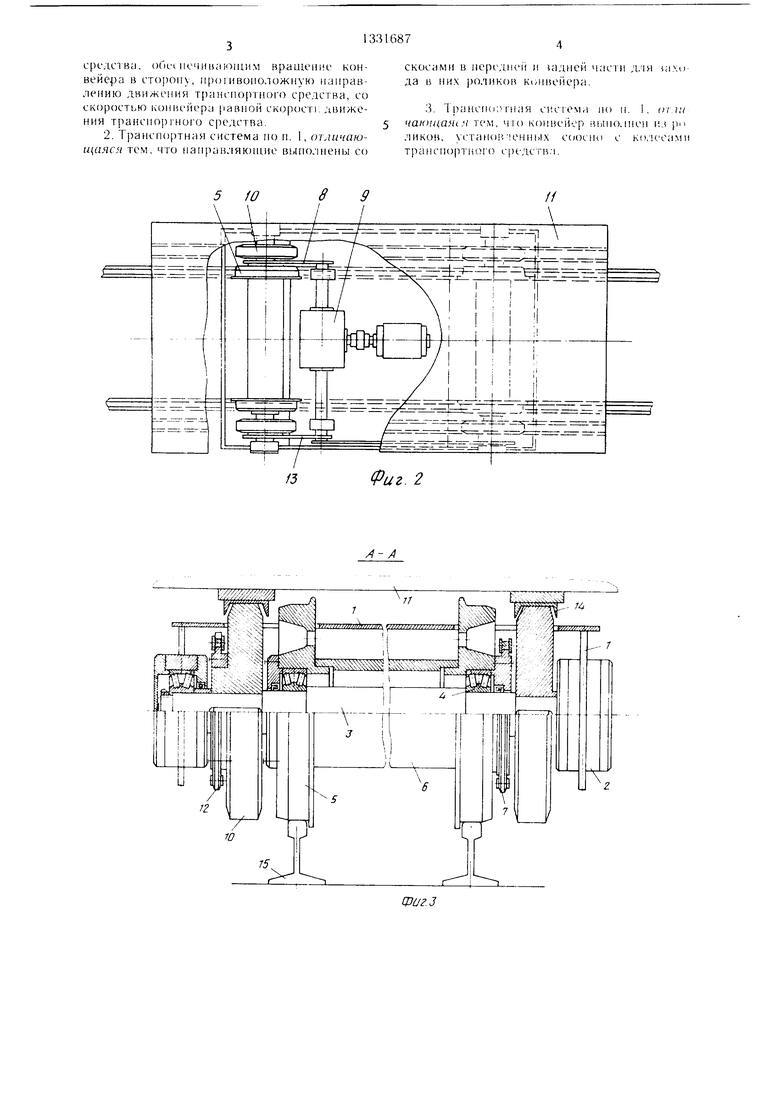
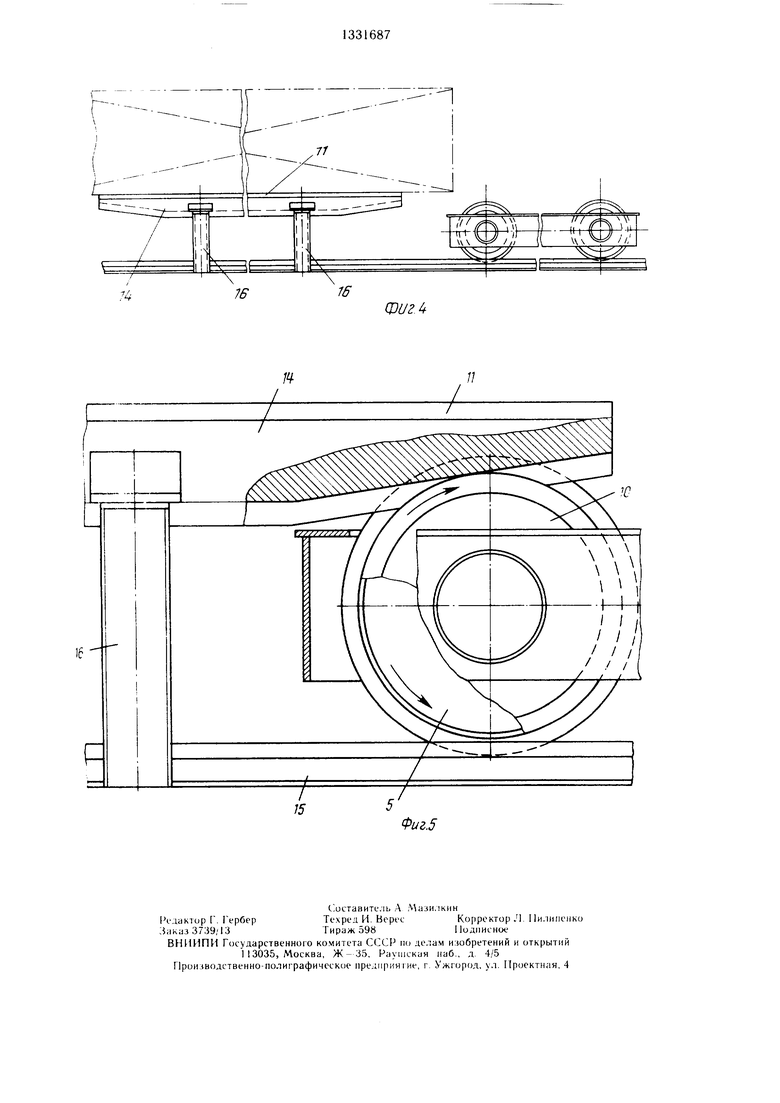
На фиг. 1 изображена трансиортнаи сислема, o6HUiii нид; на ijiHi. 2 - то же, вид в нлан( на транспортное средство с KOHiUTK-poM; iia фнг . :3 раз)1ез .Л--А на ijun. i, на (()нг. 4транспортная систем 1 со сня .оп подьемной илатформся ; на )Н1. Г; го Ж1.. начало оперсщии загрузки.
Транснор система состоит из транс- нор: нич о с|Н 1.с 1ва с рамой 1, на нод- niHHiiHKiiBi.ix онорах L которой установлены валы : .; нндщинниконых онорах 4 3 ..-| ;п;овлепы Ko.ieca Гт. Колеса 5 попарно /ь:ес:: 1 свнчаиы др с другом но,чым ва- . ti. . .аочку 7, устан()в:1енпую .ма (МНИМ н;-. колес о, пенной передачей 8 Kii. icca Г) соеди |як)тся с нриводо.м 9, имею- листанннинi oc ун)ав.чение. Соосно с ко- ;i c;iMii i тс На алах неподвижно чл анов.1е|; Kofi uniep, сосччппций нз двух нар роликов 10. HccviHHX на себе с ьемную н.чат- (() И. Ролики 1(1 через звездочку 12, .iauoen/iCHHyio на одном из них, цепной нере- .ijHcii i : c(U ;;HHeiu.i с ириводо 9 с дистап- 1Ли1МИ1 1м управ/к нием. На с ьемной 1лгггфо - ме i ш.молнспы , ;ик)Н1ие 4, но кото- pi)iM нсремеп1,а1о гея ро.ликн 10. Направ- ;vinMiinc 14 I конпе н в нача.те своем снабжены скосами нод онределеным углом 1, горизонтальной нл.оекости. Колеса 5 ие1 )е- Mciic: нчг л но рс-.-;ьсам 15 (/ьемная платформа i 1 Is -lOMCiiT разгрузки опускается па с ганиона;ми,1с концевые опоры Ui, уста- ,. 1нныс в местах разгрузки. В кинема- гич(.-сг.И; схему ;ip iBO;ui 9 входш .чектро- хкп ннгнаи N: lirj (не ноказано), позволяк)- HUivi осм;ич...ля1т. раздельное (или одновре- менног) кк. почснм , и работу онорных колес 3 и jio.iHKoB 10.
Т .ансчортпая снс1ема работает следуюHiHM OOjj.i.uiM,
( .шсганниоппого ну, 1ьта управления зклк)час1ся п)ивод 9. Через цепную передачу S и ..1 ездочку 7 приводятся в движение колеса. Г), установленные на подп1И1и1Ико1 ых опорах 4 г.ала 3. Iljni ъиом члектромаг- аитная My(j)ia иривода 9 отключена и ролики К). устано1 ленные на валу 3, остаются пен(1движными. (./ьемиаи платформа 11 неподвижно лежит на роликах 10 конвейера и нсрехилцается относительно рельсового ну 111 If) за счет вра1цени колес 5 с )еде- .leHHois скорос1л 1о. Для съема платформы нкл1очаег я -. 1ектро агнитная муфта н)иво- да 9 и через ценную передачу 13 и звездочку 12 П1мии);1ятся в дтействис ролики 10 KOHiieiiepa, установленные соосно с колесами
5
0
5
0
5
0
5
0
5 на валу ii При :iioM окружные ско- юсги вращения колес о и роликов 10 равны но величине и обрагны но нанра(лепию. В резу,1ыате loixi cKopocib пероменгения ст.емной н.чатформы I 1 относи- ельно рельсов 15 становится равной нулю, а те,11ежка нерементаегся с нервонача.и.ной скорс)ст1ж). выкатываясь из-нод сьемной платформы 11. Мри этом ро.тики И) перекат1)1ваются по на- нрав..|яюн1им 14с-ьем:и)й кчатформы 11 иона .Ui счет наклонных участков направ.мяюптих 14 плавно опускается на кон тевые стационарные оноры 16 так. что расстояние между горизонтальным участком направляющих 14 и п,чоскостью рельсов 15 меньше диаметра юликов 10. Д.чя того, чтобы установить с1 емнук) п.чатформу на ролики И), с пулыа дистанционного унрав.:1ення вк.пкь чается нрнвод 9 и через пенную 1 ереда- чу S н зп(;1очку 7 приводятся в движение Ko.:ieca 5. обеспечивак)ии1е определенную скорое | ь и iianjiaB.н нне к cbevi oii н.матформе 1 I. стошней iia c l . пиюнарнькч oiiopax К). В .момент нодхода к сьем1и.11 п.;|ат|})орме И включается лектро.магн1тгная му4)та нри- вода } и пеппую не ре.тачу 13 si звездочку 12 нриво тятся но в|г:;Л1С Нпе ро.пики И). 11)И )о их окружная скорость 1)авна по ве- .тнчине и нротпвоно.ю/кна по нан)а1).. окружной скорости колес 5. 1)и да.чьией- шем иере.ментеннн е. 1ежки к сьемной платформе 11. ролики 10 упираются в нак.чон- ные учас ткн нанравляюнтих 14. Так как окру. скорости ро.ликов 10 и колес 5 равны но ве;1ичине н нротивоно.южны но направлению, скорость продо.лыю) перемещения С1,емной п.:1атфо|)мы 11 остается равной нулю и транспортпое средство с нерво- нача. ско|)остью вкатьп ается под с ьем пую н.1атфо)му 11. При ытом ро.лики 10. перекать1ваясь по нак.лоппым участкам на- П)ав.ляк)1цих 14, нринод1П1мают сьемную нлат(}1())му II над станипонар1П)1М11 )|-ja- .ми И) и выходят па торпзонта. участки нанрав.чяюн1их 14, фнксир уя 1Т атформу 11 в приподнятом над опорами К) но.ю/ке- нии. ( пул.ьга дпстанцио11но|-о унрав.лепия вык.чючается у,чек трома 11итная муф1а иривода 9, нрекран1ая враптение ро.ликов 10. и платформа 1 вместе с леле/ккой нере- мепшется но направ.лепию к рачгрузке.
Формула и: ,оС ретснин
. Транспортная система. содержан1ая транспортное средство г конвейером д.ля раз- меш.ения на нем сьемной платформ) с направляющими, стационарные oH() д.ля установки на них последней, отличающаяся тем, что, с целью обле1чения погрузочно- 1)азгрузочных операций, стационарные оноры установлены по боковым сторонам пути движения транспортного средства, а конвейер кипематичееки соединен через муфлу сцстт.ле- ния с приводом ко.чес- трапеноргного
с()(. дс1 Bu, o(iL4 iic iniiaioiiuiM Bpauieiine конвейера в сторону, iipoi ивоположную направлению дниження трангнортного средства, со скоростью 1 оннейера равной скоростг. движения транспортного с|1едства.
2. Транснортная система по п. 1, отличающаяся тем, что наг1раиляюн1ие вьикхшены со
скосами в передне и )аднеи части д. 1я iaxo да в них |)оликов KofiBeiiepa.
3. Г)ансгк1;п-ная система но и. 1, or.tu чакчцат.ч тем, что KOHBeiiop ялполнен нз ш ликов, устанор, ,х CCJOCHO с ко/ есамп транспортного ср -дства.
иг. 2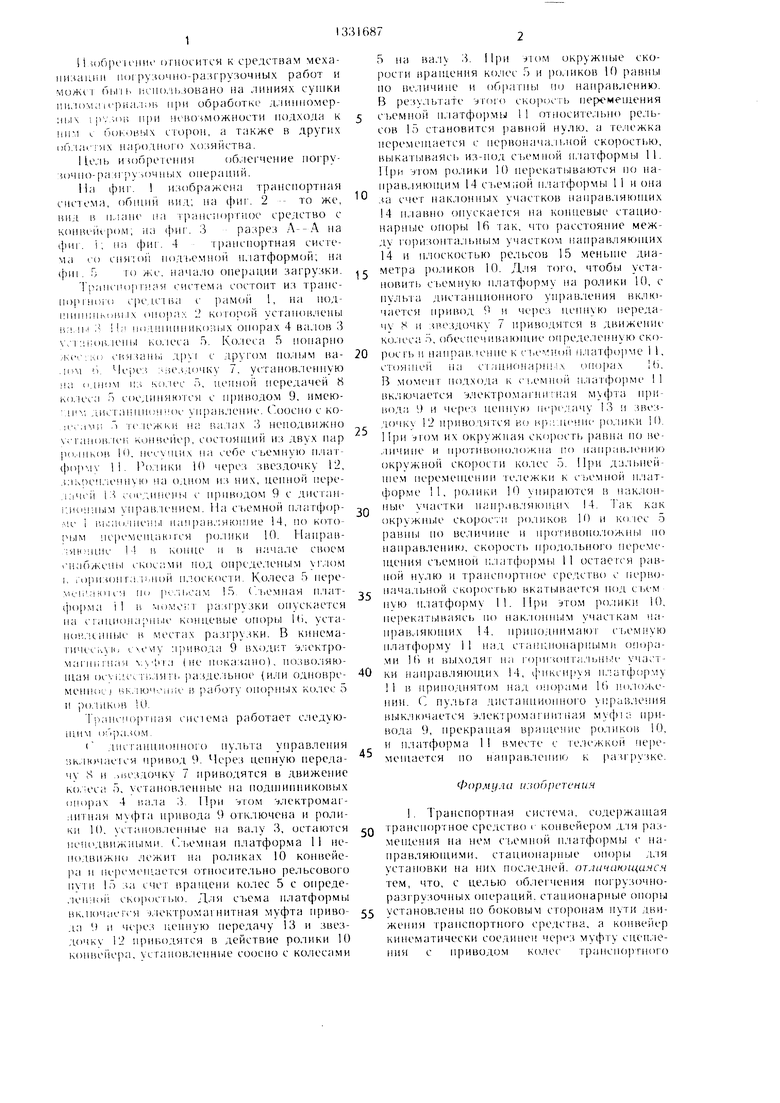
| название | год | авторы | номер документа |
|---|---|---|---|
| Тележечный конвейер | 1983 |
|
SU1177217A1 |
| НАПОЛЬНЫЙ ЦЕПНОЙ КОНВЕЙЕР | 1969 |
|
SU256611A1 |
| Устройство для перегрузки изделий | 1980 |
|
SU948817A1 |
| Машина для укладки пробок в глуходонные изложницы | 1978 |
|
SU743776A1 |
| Установка для изготовления кирпичных панелей | 1986 |
|
SU1518132A1 |
| Вертикально-замкнутый тележечный конвейер | 1981 |
|
SU982992A1 |
| Устройство для штабелирования плоских длинномерных изделий | 1985 |
|
SU1331768A1 |
| Устройство для прокладки трубопровода на неплотных грунтах | 1982 |
|
SU1117424A1 |
| Транспортная система автоматизированной линии сборки | 1986 |
|
SU1495071A1 |
| Транспортирующее устройство | 1980 |
|
SU945005A1 |
Изобретение относится к средствам ме.хаиизгнип погру:и)Ч11О-разгрузочны. работ, а именно к транспортным системам для нодачи материалов с торца тележек при затрудненном подходе к ним с боковых сторон. Целью изобретения яр ляется облегчение погрузочно-разгрузочных операций. 1 jianc- портпая система содержит стационарные oHopi.i и те. 1ежку с jiaMon 1, на одном валу колес которой установлены ролики, взаимодействующие со ст.емпой платформой 11. Стационарные опоры установлены по бокам от линии движения тележки. Съемная платформа 11 может быть установлена на станционарпых опорах, а при подъезде под нее тележки - на роликах. Конвейеры, пра- Н1аю1ииеся в сторону, противоположную направлению движения транспортного средства, с равной скоростью, обеспечивают плав ную нагрузку платформы с грузом на тележку. 2 з.п.ф-лы, 5 ил. ОО СО С ОЮ 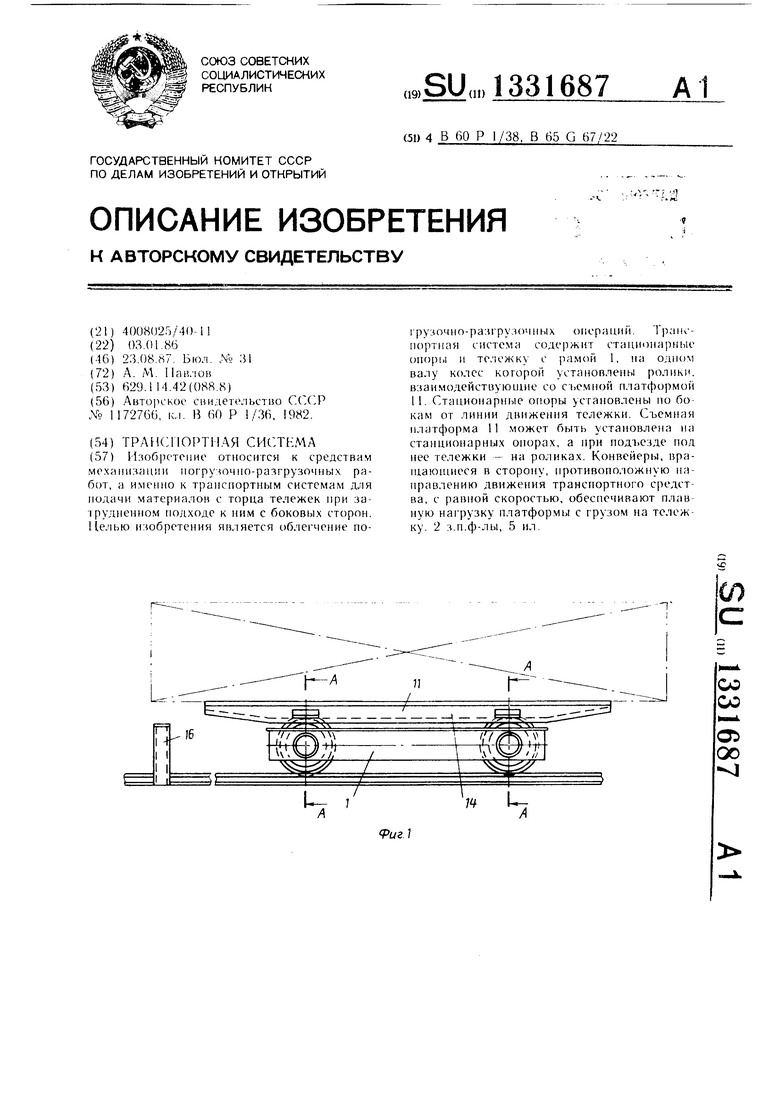
J z
| Погрузочно-разгрузочное устройство транспортного средства | 1982 |
|
SU1172766A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
