(54) ВЕРТИКАЛЬНО-ЗАМКНУТЫЙ ТЕЛЕЖЕЧНЫЙ «ОНВЕПЕР
1
Изобретение относится к машиностроению, в частности к транспортным средствс1М для перемещения штучных грузов при межоперационных технологических процесссис.
Известен вертикально-згьмкнутый конвейер с неопрокидывающимися тележками, содержащий параллельные цепи, огибающие концевые звездочки, с шар- нирно закрепленными на них тележками, которые на ходовых катках перемещаются по направляющим, тяговый орган и механизмы перевода тележек с одной ветви на другую СИ.
; Недостаток такого конвейера заключается в нeoбxoди юcти строгого определения соотношения между шагом тележек, диаметром концевых звездочек и расстоянием между осями передних и задних ходовых катков тележки, что ограничивает область применения таких конвейеров. Кроме того, данные конвейеры не обеспечивают возможность расцепления тележек с тяговой цепью во время работы конвейера.
Наиболее близким техническим решением является вертикально-замкнутуй тележечный конвейер, включаксдий раму с верхними и нихсними направляющими для катков тележек, тяговый орган.
огибающий основные ведущие и ведомое звездочки, с каждой из которых через шестеренчатую передачу соединен копир соответствующего подъемноопускного механизма, состоящего из копирного рычага с роликом, взаиг одeйcтвy зc им с копиром и грузодержателя С2.
Недостатке данного конвейера является невозможность снятия тележек с изделием при работающем конвейере для проведения, при необходигюсти, технологических операций на стационарном рабочем месте или на другом конвейере, так как каждая тележка имеет постоянное шарнирное соединение одной осью с тяговой цепью конвейера. Это сужает технологические возможности конвейера.
Целью изобретения является расширение технологических возьюжиостей.
Указанная цель достигается тем, что вертикально-замкнутый тележечный конвейер, включающий -с верхним и нижним направляющим для катков тележек, тяговый орган, огибающий ведущую и ведомую звездочки, соединенные шестеренчатыьм передачами к копирам соответственно подъемного
и опускного механизмов, каждый из которых выполнен в виде копирного рычага с роликом, взаимодействующим с копиром, и грузоносителя, снабжен устан§ Ленными на раме сталкивающими механизмами, каждый грузодержател выполнен в виде пространственных ведущего и ведомого рычагов и шарнирн закрепленной на них платформы, при этом свободный конец каждого ведущего рычага посредством промежуточного звена связан с соответствукяцим копирны рычагом.
Кроме того, каходый сталкивакиций механизм выполнен в виде натяжной и приводной звездочек и огибающей их цепи с толкателями, причем каждая приводная звездочка связана с соответствующей основной звездочкой через шестеренчатую передачу.
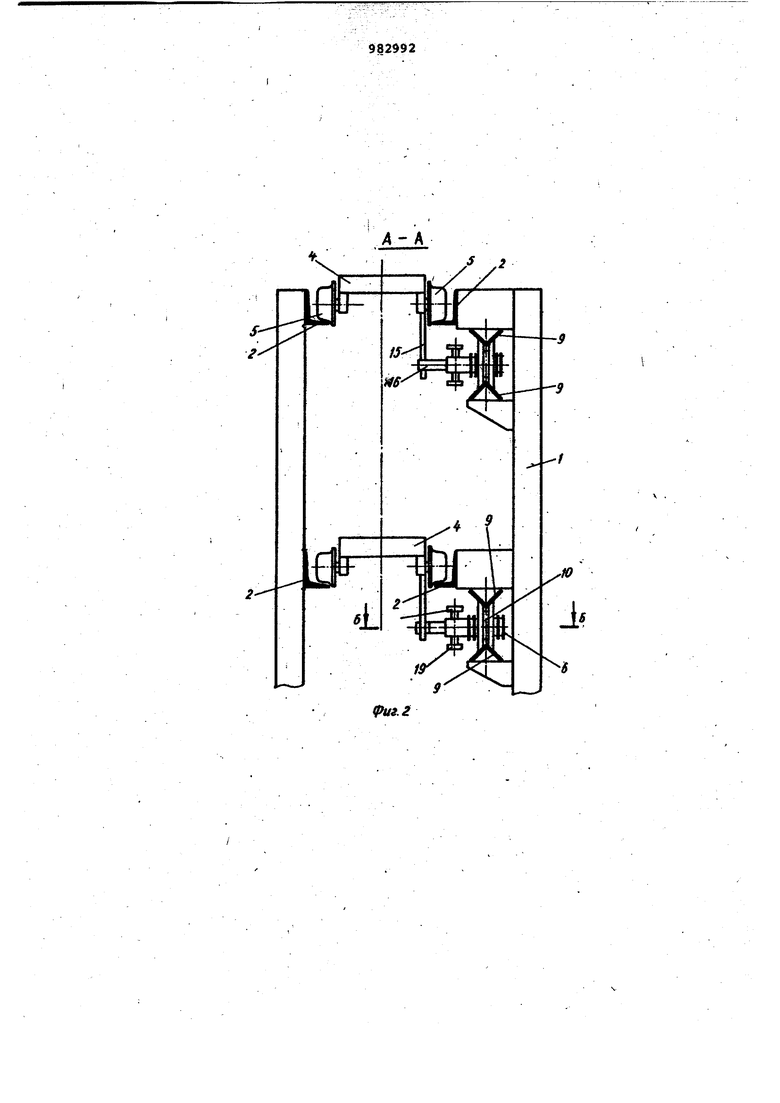
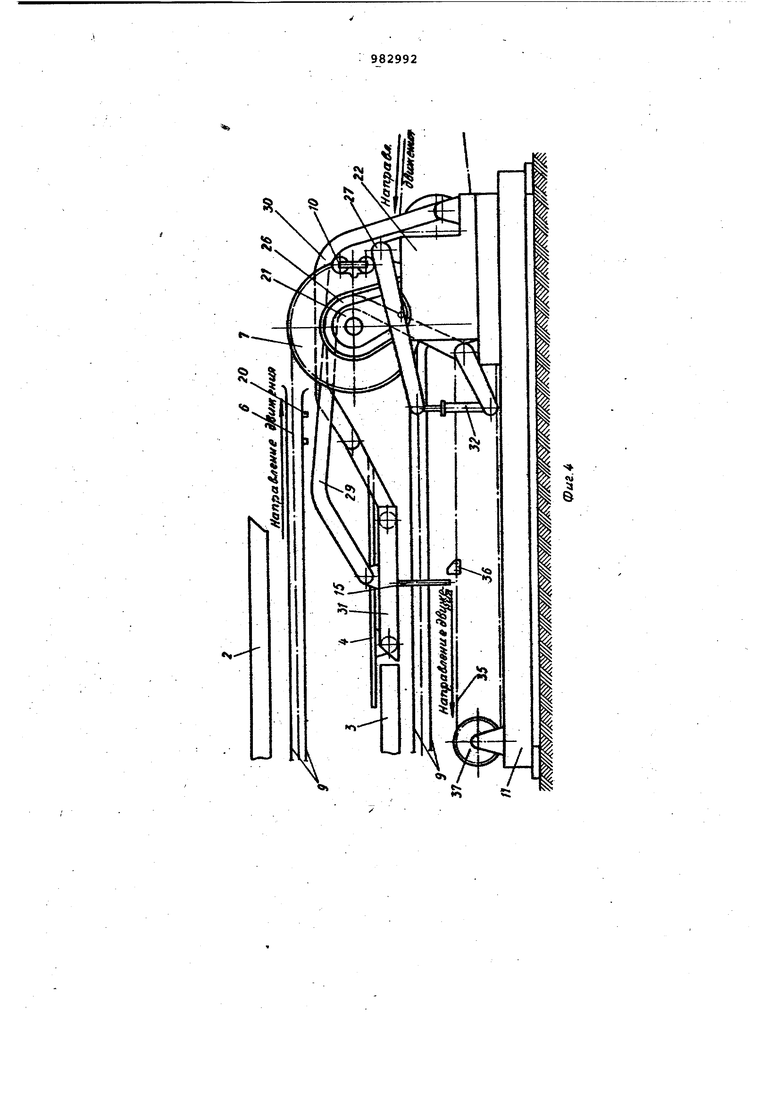
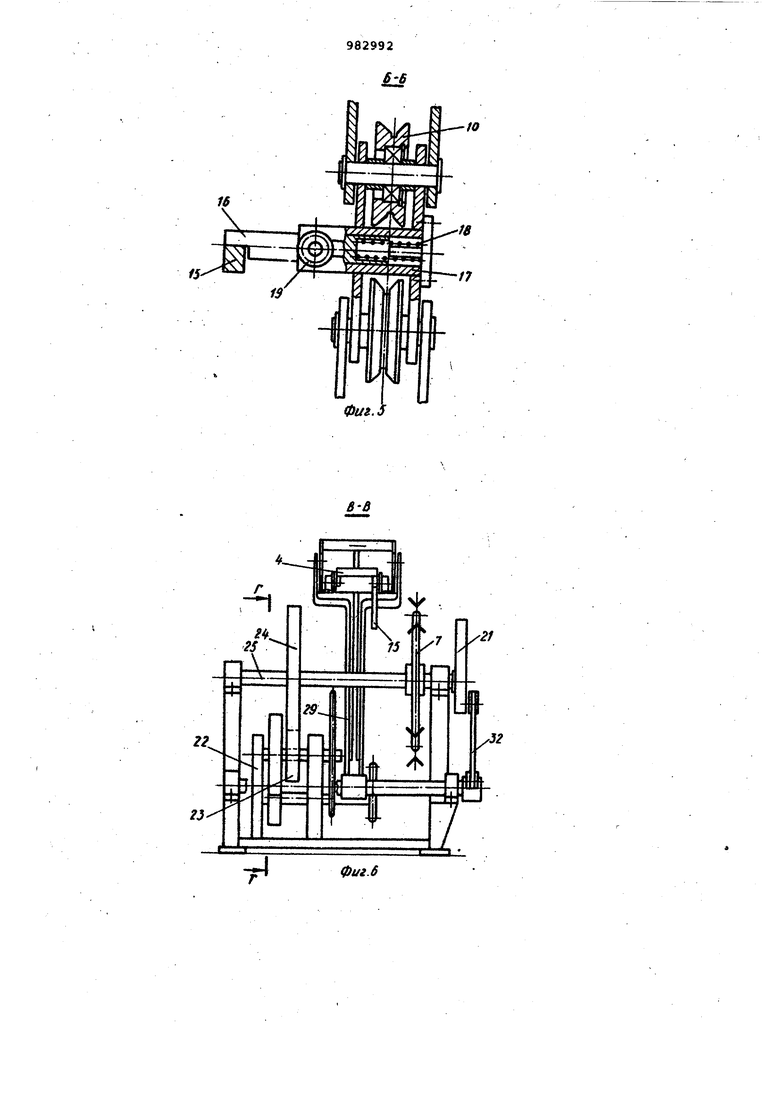
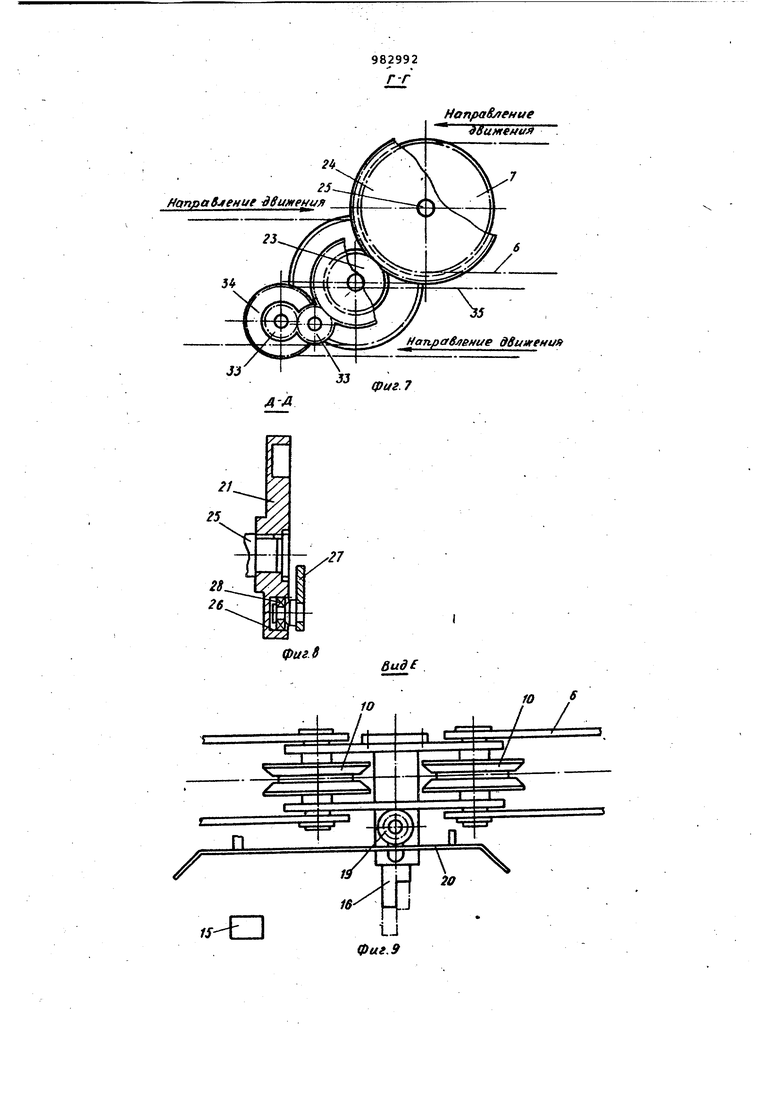
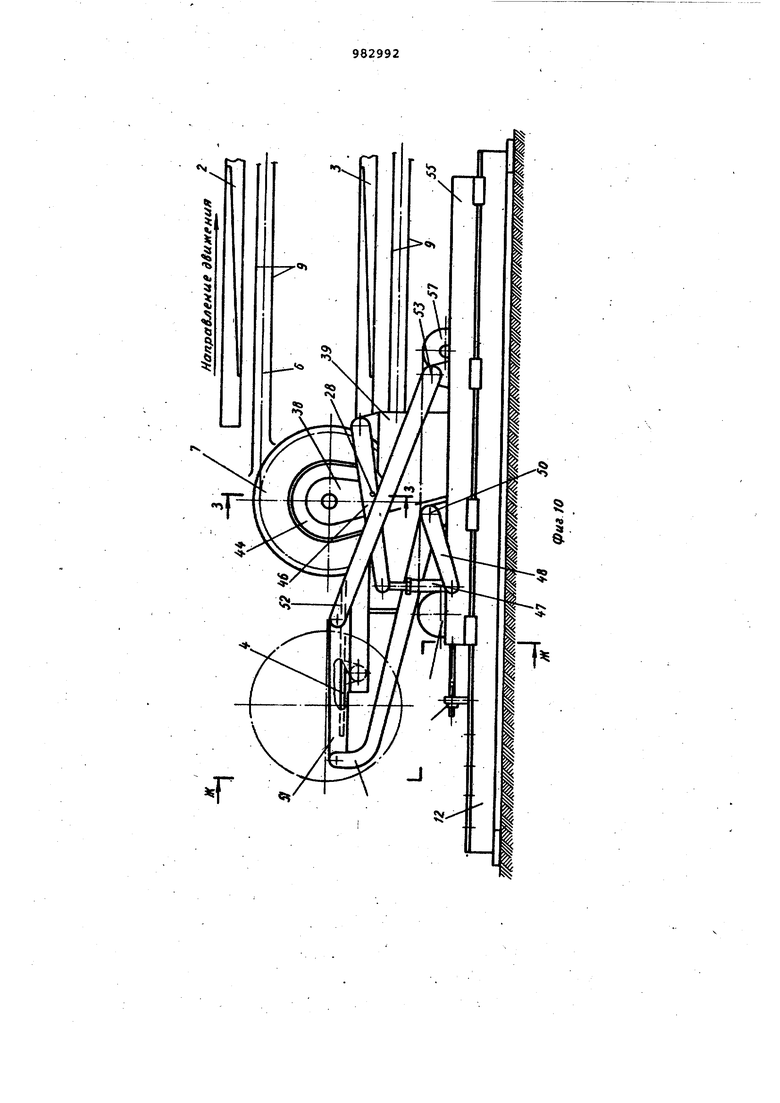
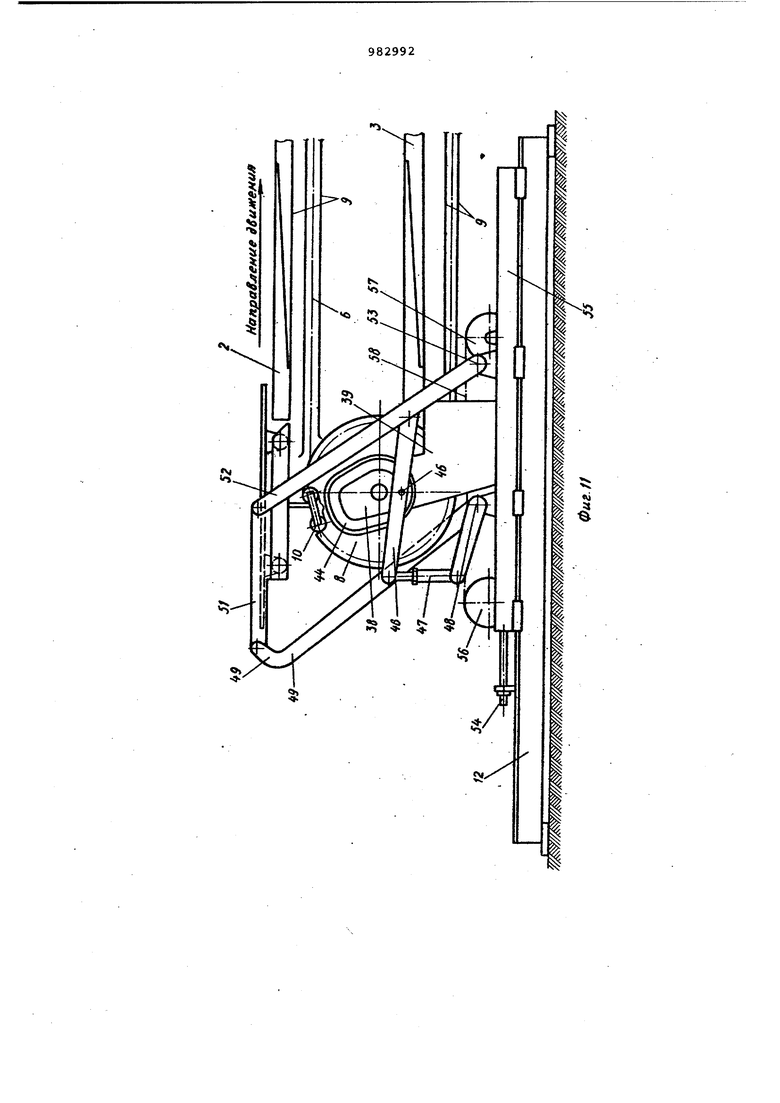
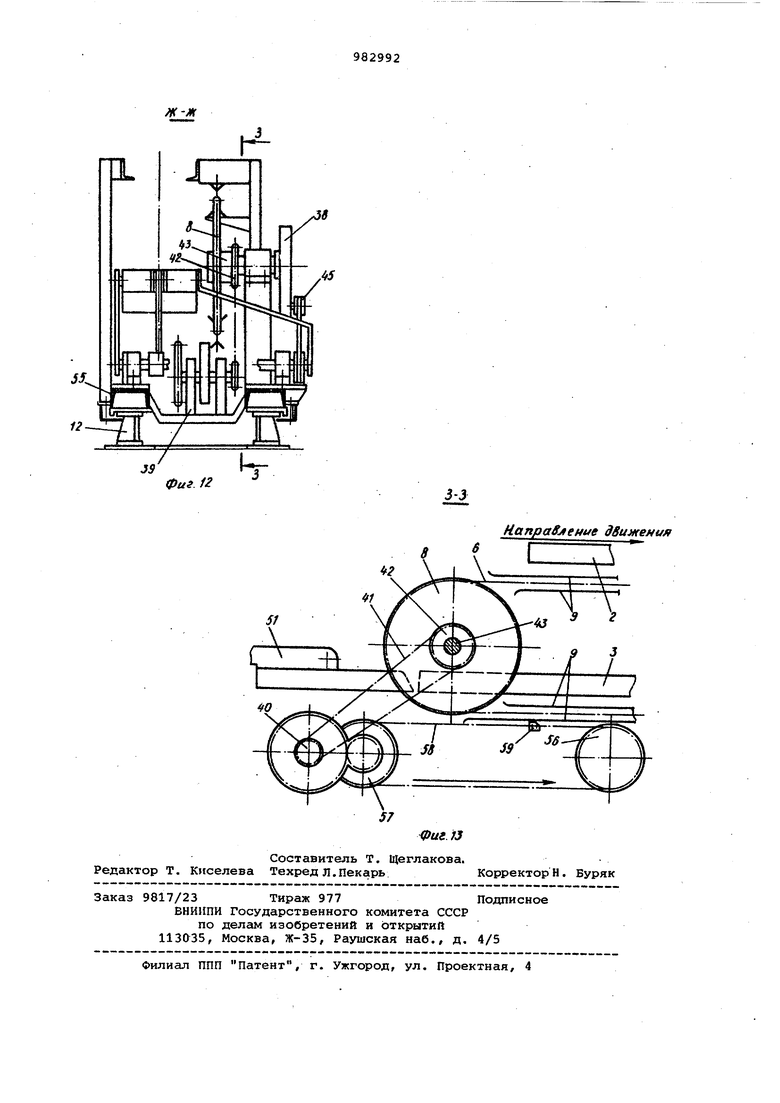
На фиг. 1 изобралсен вертикальнозамкнутый тележечный конвейер, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - механизм у натяжной звездочки в верхнем положении; на фиг. 4 - то же, в нижнем положении; на .фиг. 5 - разрез В-Б на фиг. 2; на фиг. б - разрез В-В на фиг. 3 на фиг. 7 - разерз Г-Г на фиг. б; на фиг. 8 - сечение Д-Д на фиг. 3; на фиг. 9 - вид Е на фиг. 3; на фиг. 10 - подъемный механизм у ведущей звездочки в нижнем положений; на фиг, 11 - то же, в верхнем положении; на фиг. 12 - разрез Ж-Ж на фиг. 10 на фиг. 13 - разрез 3-3 на фиг. 10.
Вертикально-зa /Iкнyтый тележечный конвейер включает раму 1 с жестко укрепленными на ней верхними 2 и нижними 3 направляющими, по которым перемещаются тележки 4, с катками 5 тяговый орган в виде цепи б, огибающей основные ведугчую 7 и ведомую 8 звездочки. По дополнительным направляющим 9 перемещаются ролики 10 цепи б. На опоре 11 и 12 установлены соответственно опусной 13 и подъемный 14 механизмы.
На тележках 4 закреплены поводки 15, взаимодействующие с захватами 16 , смонтированными на цепи б. Захваты 16 имеют возможность перемещаться в стаканах 17 под действием пружины 18 и снабжены роликами 19, контактируквдигли с линейкой 20, установленной на дополнительной направляющей 9. Опускной механизм 13 соединен с основной ведущей звездочкой 7 через копир. 21 и шестеренчатую передачу в виде закрепленного на опоре 11 редуктора 22, состоящег из выходной шестерни 23, которая входит в зацепление с зубчатым колесом 24, жестко закрепленным на валу 25 ведущей звездочки 7. На этом же валу 25 закреплен копир 21 с заданным профилем 26. Опускной механизм
13 состоит из копирного рычага 27, на котором смонтирован ролик 28, взаимодействующий с профилем 26, и грузодержателя, выполненного в виде пространственных ведущего 29 и ведомого 30 рычагов, на которых шарнирно закреплена платформа 31. Рычаг 27. шарнирно закреплен одним концом на опоре 11, а другим на промежуточном звене 32, которое шарнирно связано с прос гранственным ведущим рычагом 29. Пространственный ведог-плй рычаг 30 свободным от платформы 31 концом шарнирно закреплен на опоре 9. Выходная шестерня 23 через дополнительную пару шестерен 33 связана с приводной звездочкой 34 соответствующего сталкивающего механизма, выполненного .в виде цепи 35 с толкателями 36, которая огибает приводную 34 и натяжную 37 звездочки.
Подъемный механизм 14 соединен с основной ведомой звездочкой 8 через копир 38 и шестеренчатую передачу в виде закрепленного на подвижной опоре 12 редуктора 39, входная звездочка 40 которого посредством цепи 41 входит в зацепление со звездочкой 42,.неподвижно; сидящей на Всшу 43 основной ведомой звездочки 8. На валу 43 также закреплен копир 38 с заданным профилем 44, с которым контактирует ролик 45 копирного рычага 46; Один конец копирного рычага 46 шарнирио закреплен на подвижной опоре 12, а другой через промежуточное звено 47 шарнирно соединен с плечом 48 пространственного ведущего двуплечего рычага 49, установленного на оси 50 и шарнирно соединенного с платформой 51, сбалансированной пространственным ведомым рычагом 52, установленным на оси 53.
На раме 12 установлены натяжка 54 и редуктор 39 на подвижном основании 55 и натяжная звездочка 56, связанная со звездочкой 57 редуктора 39 цепью 58, на которой закреплен толкатель 59.
Вертикально-замкнутый тележечный конвейер работает следующим образом,
цепь б непрерывно и равномерно движется под действием тяговых звездочек 7, получающих вращение от привода (не показан) через редуктор 22, его выходную шестерню 23 и зубчатое колесо 24. При движении тяговой цепи 6 захваты 16 входят в зацепление с поводкаг/ш 15 тележек 4 и продвигают тележки 4 по направляющим 2 со скоростью тяговой цепи 6. Прямолинейное движение тележки 4 продолжается до перехода ее на платформу 31. В момент перехода происходит расцепление тележки 4 с тяговой цепью 6: ролик 19 .захвата 16 наезжает на линейку 20, установленную на направляющей 9, 5 пружина 18 сжимается и захваты 16
утапливаются в стаканах 17, выходя из, зацепления с поводка1ни 15 тележки 4.
Ot привода вращение через вал 25 зубчатого колеса 24 передается копиру 21, по профилю 26 которого перемещается копирный ролик 28. Копирный ролик 28, перемещаясь пб профилю 26 копира 21, поворачивает связанный с ним копирный рычаг 27, который; в свою очередь, перемещается через промежуточное звено 32 пространственного ведущего рычага 29 таким образом, что платформа 31 с тележкой 4 на ней опускается в нижнее положение. -Строго горизонтальное положение платформы 31 обеспечивается при помощи пространственного ведомого рычага 30.
Опускание платформы 31 с верхнего в нихснее положение осуществляется за один оборот копира 21, закрепленного на валу 25.
Сталкивание тележки 4 с платфорVH 31 на направляющие 3 осуществляется толкателем 36, установленным на цепи 35, получающей двиясение от привода через редуктор 22 и приводную звездочку 34.
При вЕлходе тележки 4 на направляющие 3 захваты 16 тяговой цепи 6 зацепляют поводки 15 тележек 4 и перемещают их по нижней ветви конвейера , тележки 4 перег-ющаются со скоростью тяговой цепи 6.
При подходе тележки 4 к подвижной раме 51 толкатель 59,закрепленный на цепи 58, подхватывает за поводок 15 тележку 4 и перемещает ее на платформу 51. В зтот момент захваты 16 тяговой цепи 6 выходят из зацепления с поводками 15 тележек 4.
Подъе14 платформы 51 с тележкой 4 .с нижнего в верхнее положение осуществляется при помощи рычажной системы: пространственного рычага 37, промежуточного звена 47, копиркого рычага 46 с роликом 45, перемещающимся по копиру 38 аналогично церемещеншэ платформы 31 с верхнего в нижнее положение в обратном порядке. Стабилизация платформы51 в строго горизонтальном положений осуществляется при по1Ющи пространственного ведомог рычага 52.
В верхнем положении платформы 51 захват 16 тяговой цепи 6.подхватывает поводок 15 тележки 4 и перемещаетее по верхним направляющим 2 до платформы 31. Весь цикл повторяется снова.Л
Положительный зффек-т заключается в расширении, технологических возможностей что связано с тем, что конвейер можно применять для перемещения в технологической линии, например
5 сборки изделий, которые необходит-ю либо возвращать на предыдущие рабочие места, либо передавать вместе с тележкой на стационарные рабочие места, либо передавать на другой
10 конвейер и т.п. Применение предлагаемого конвейера позволит высвободить рабочих, занятых на вспомогательных операциях путем уменьшения трудозатрат на межоперационную транспортировку.
Формула изобретения
20
1. Вертикально-зс мкнутый тележечный конвейер, включающий раму с верхниг ш и нижни 1и направляющими для
катков тележек, тяговый орган, огибающий ведущую и ведомую звездочки, соединенные шестеренчатыми передачами с копире соответственно подъемного и опускного механизмов, каждолй
из выполнен в виде копирного рычага с роликом, взаимодействующим с копиром, и грузодержателя, отличающийся ;Тем, что, с целью раслмрения те:шологических
вoз южнocтeй, он снабжен установленными на раме сталкивающими механизмами, а кажд:к1й грузодержатель выполнен в виде пространственных ведущего и ведомого рычагов и шарнирно закрепленной на них платформы, при этст
свободный конец каждого ведущего рычага посредством промежуточного звена связан с соответствукадим копирньил рычагом.
2. Конвейер по п.1, о т л и ч а ю щи и с я тем, что каждый сталкивающий механизм выполнен в виде натяжной и приводной-звездочек и огибающей их цепи с толкателяг ш, причем каждая приводная звездочка
связана с ведущей или ведомой звездочкой через шестеренчатую передачу.
Источники информации, принятые во внимание при зкспертизе 1. Авторское свидетельство СССР 144771, кл. В 65 G 17/26, 1961.
2. Авторское свидетельство СССР 337306, кл. В 65 G 17/16, 1970 (прототип) ..
fn
«Vj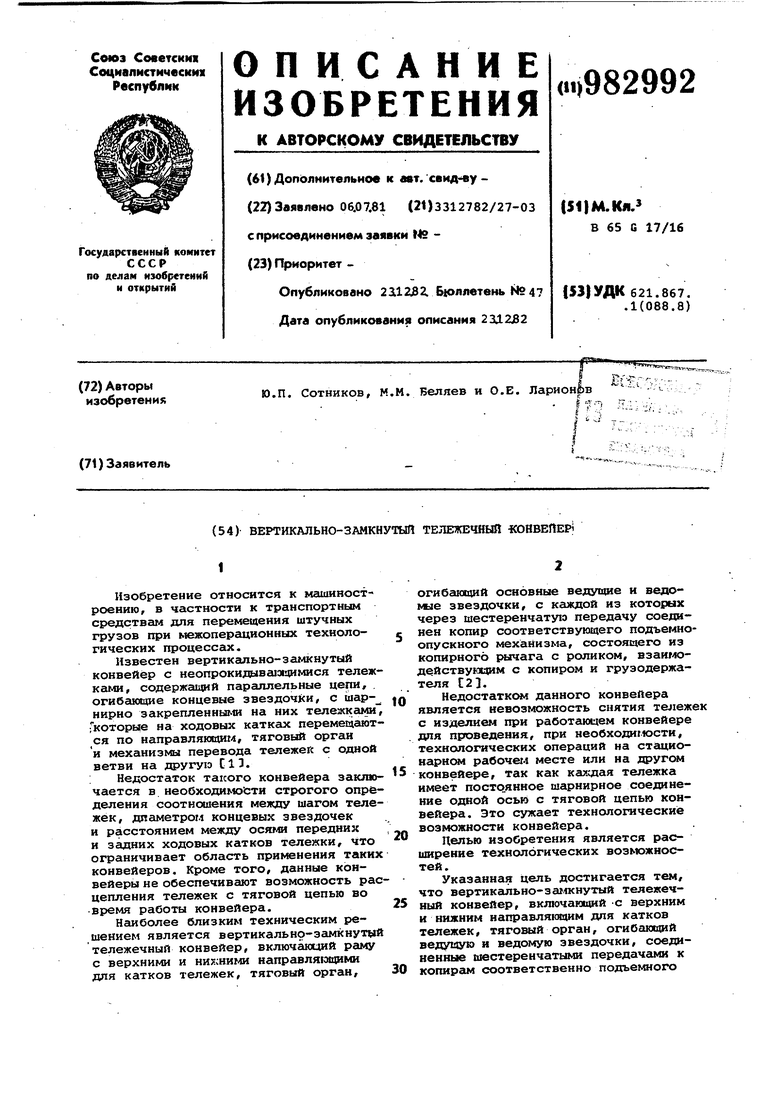
| название | год | авторы | номер документа |
|---|---|---|---|
| Тележечный конвейер | 1979 |
|
SU870272A1 |
| Конвейер-накопитель | 1985 |
|
SU1296491A1 |
| Горизонтально-замкнутый тележечныйКОНВЕйЕР | 1979 |
|
SU821336A1 |
| ГОРИЗОНТАЛЬНО-ЗАМКНУТЫЙ ТЕЛЕЖЕЧНЫЙ КОНВЕЙЕР | 1994 |
|
RU2090480C1 |
| Горизонтально-замкнутый конвейер | 1977 |
|
SU685576A1 |
| Тележечный конвейер | 1983 |
|
SU1131782A1 |
| АРТИЛЛЕРИЙСКАЯ КОРАБЕЛЬНАЯ УСТАНОВКА | 2012 |
|
RU2533947C2 |
| Конвейер с пространственной трассой | 1982 |
|
SU1094812A1 |
| Агрегат для термообработки стеклоизделий | 1979 |
|
SU872471A1 |
| КОНВЕЙЕРНЫЙ ПИТАТЕЛЬ АРТИЛЛЕРИЙСКОГО АВТОМАТА КОРАБЕЛЬНОЙ АРТИЛЛЕРИЙСКОЙ УСТАНОВКИ | 2018 |
|
RU2694485C1 |

25т
21
фиг.6
//.
фиг. 9
HortfiaS/reffuf
SUHtfHUJt
,
Направление двиагеми
фиг. 7
&udf
