Изобретение относится к подъемно-транспортному машиностроению, а именно к грузо- захватам телескопическим для кранов-uiTa- белеров с переменной скоростью выдвижения грузозахватной секции, и может быть использ1)ваио в различных отраслях про- мып ленности иа автоматизированных складах и складах с ручным управлением подъем но-транспортного оборудования.
Цель изобретения - улучп1ение эксплуа- тационных характеристик путем 11овып1ения точности позиционирования.
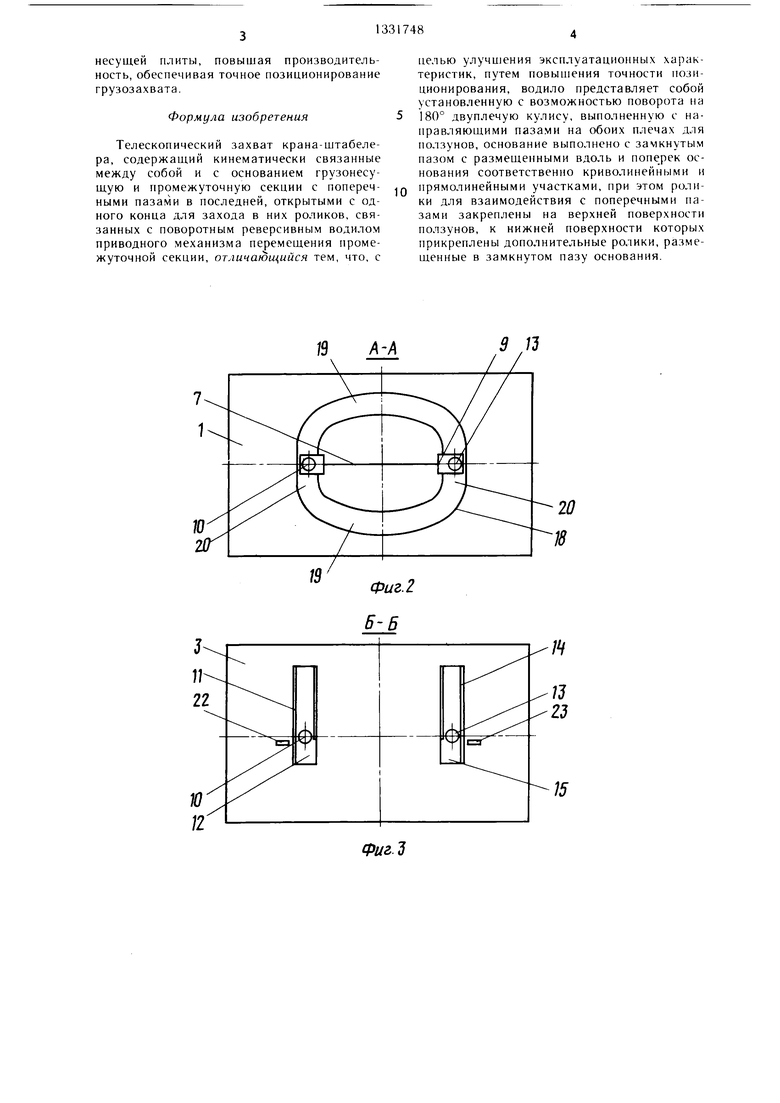
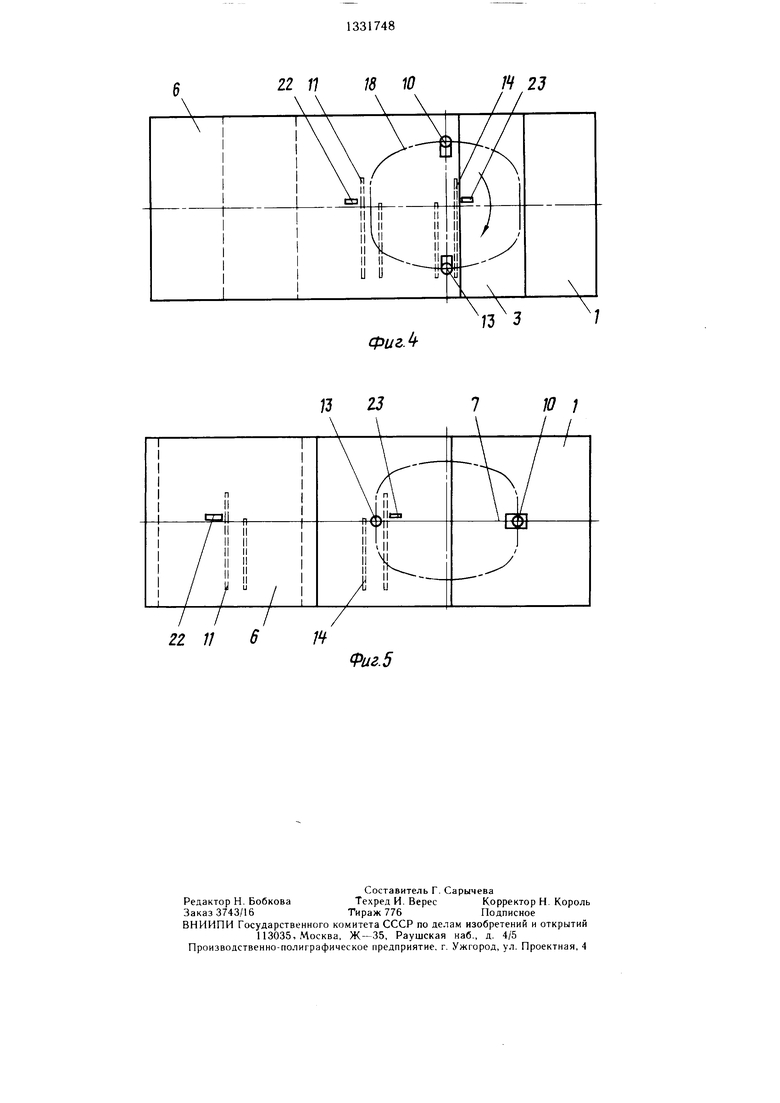
На фиг. I показан телескопический гру- зозахват в исходном положении, общий вид; на фиг. 2 разрез А - А на фиг. 1 (вид на основание); на фиг. 3 - разрез Б -Б на фиг. 1 (вид на промежуточную плиту); на фиг. 4положение верхней несущей промежуточной плиты при повороте водила на 9()°; на фиг. 5 - положение верхней несущей и промежуточной плит при повороте водила на 180° (положепие верх- ней грузонесущей плиты в крайнем левом положении).
На основании 1 (фиг. 1) телескопического крана-щтабелера установлена нодвижпая в горизонтальной плоское- ти от нривода 2 и кинематически связанная с ним промежуточная секция-плита 3, смонтированная па опорах 4 качения. На промежуточной секции-плите 3 на опорах 5 качения установлена верхняя несущая секция-плита 6. Кинематическая связь привода 2 с промежуточной плитой 3 осуществляется при НОМО1ЦИ направляющих и двуплечего водила 7, на котором располагается ползун 8 перемещения промежуточной плиты 3 вправо и ползун 9 пере.мещения промежуточной ПЛИТЕ, 3 влево. Верхний ролик И) ползуна 8 входит в поперечный паз 11 с окном 12 (фиг. 3), перемещающий промежуточную плиту 3 вправо, а верхний ролик 13 полуна 9 входит в поперечный паз 14 с окном 15 (фиг. 3), перемещающий промежуточную плиту 3 влево. Нижний ролик 16 ползуна 8 и нижний ролик 17 юлзуна 9 располагаются в замкнутом профильпом пазу 18, состоящим из криволинейных 19 и прямолинейных 20 участков, выпо;1непном на основании 1 (фиг. 2). Вертикальный вал 21 двуплечего водила 7 (фиг. 1) соедипен с приводом 2. На промежуточной плите 3 снизу, кроме поперечных пазов 11 и 14, имеются упоры 22 и 23, ограничивающие вращение двуплечего водила 7. Для привода верхней не- сущей плиты 6 телескопический захват снабжен зубчатыми рейками (ие показан), установленными на основании 1 и верхней плите 6, и блоком шестерен (не показан), установленным на промежуточной нлите 3.
Телескопический грузозахват работает следующим образом.
BepxHi.e ролики 10 и 13 в исходном положении верхней несуп1ей плиты 6 (фиг. 1),
д
5
5 0 0
5
5
0
находясь в поперечных пазах 11 и 14, удерживают верхнюю несущую плиту 6 в среднем положении относительно основания 1, а нижние ролики 16 и 17 располагаются на прямолинейных участках 20 профильного паза 18. При выдвижении верхней несущей плиты 6, например, влево двуплечее водило 7 приводом 2 вращается по часовой стрелке (фиг. 4). Двуплечее водило 7, вращаясь, перемещает находящиеся на нем ползуны 8 и 9. Нри перемещении нижних роликов 16 и 17 по прямым участкам 20 замкнутого профильного паза 18 ползуны 8 и 9 не перемещаются вдоль направления перемещения верхней несущей плиты 6 (происходит перемещение ползунов 8 и 9 по поперечным пазам 11 и 14 перпендикулярном к направлению движения верхней несущей плиты 6), при выходе нижних роликов 16 и 17 на криволинейные участки 19 замкнутого профильного паза 18 верхний ро;1ик 10 ползуна 8 выходит через окно 12 из взаимодействия с поперечным пазом 11, а верхний ролик 13 ползуна 9, находясь во взаимодействии с поперечным пазом 14, перемещает промежуточную плиту 3 влево. Одновременно, скорость верхней несущей плиты 6 через зубчато-реечную передачу начинает возрастать и при повороте двуплечего водила 7 до 90° плавно увеличивается. При дальнейшем вращении скорость начинает плавно снижаться, а при подходе нижнего ролика 17 к фя.мому участку 20 снижается до нуля. При повороте двуплечего водила 7 на 180° (фиг. 5) привод 2 вык.чючается и грузозахват подготовлен к последующей операции взятия или укладки груза.
Для возвращения верхней несущей плиты 6 в среднее положение, что происходит после выполнения грузоподъемником заданной операции (укладки или взятия груза), двуплечее водило 7 приводом 2 вращается в обратном направлении и верхний ролик 13, воздействуя на попереч- пый паз 14, перемещает промежуточную плиту 3, а следовательно, и верхнюю несущую плиту 6 в обратном направлении, сохраняя тот же порядок изменения скорости передвижения, а верхний ролик 10 при подходе нижнего ролика 16 к прямолинейному участку 20 входит через окно 12 во взаимодействие с поперечным пазом 11. При выдвижении верхней несущей плиты 6 вправо двуплечее водило 7 поворачивается против часовой стрелки на 180° (фиг. 4), при этом верхний ролик 10 ползуна 8 воздействует на поперечный паз 11. Выдвижение верхней несущей плиты 6 вправо аналогично выдвижению влево.
Форма замкнутого профильного паза позволяет плавно изменить скоростной режим, что увеличивает среднюю скорость верхней
несущей плиты, повышая производительность, обеспечивая точное позиционирование грузозахвата.
Формула изобретения
Телескопический захват крана-штабеле- ра, содержащий кинематически связанные между собой и с основанием грузонесу- щую и промежуточную секции с поперечными пазами в последней, открытыми с одного конца для захода в них роликов, связанных с поворотным реверсивным водилом приводного механизма перемещения промежуточной секции, отличающийся тем, что, с
целью улучшения эксплуатационных характеристик, путем повышения точности позиционирования, водило представляет собой установленную с возможностью поворота на
180° двуплечую кулису, выполненную с направляющими пазами на обоих плечах для ползунов, основание выполнено с замкнутым пазом с размещенными вдоль и поперек основания соответственно криволинейными и
прямолинейными участками, при этом ролики для взаимодействия с поперечными пазами закреплены на верхней поверхности ползунов, к нижней поверхности которых прикреплены дополнительные ролики, размещенные в замкнутом пазу основания.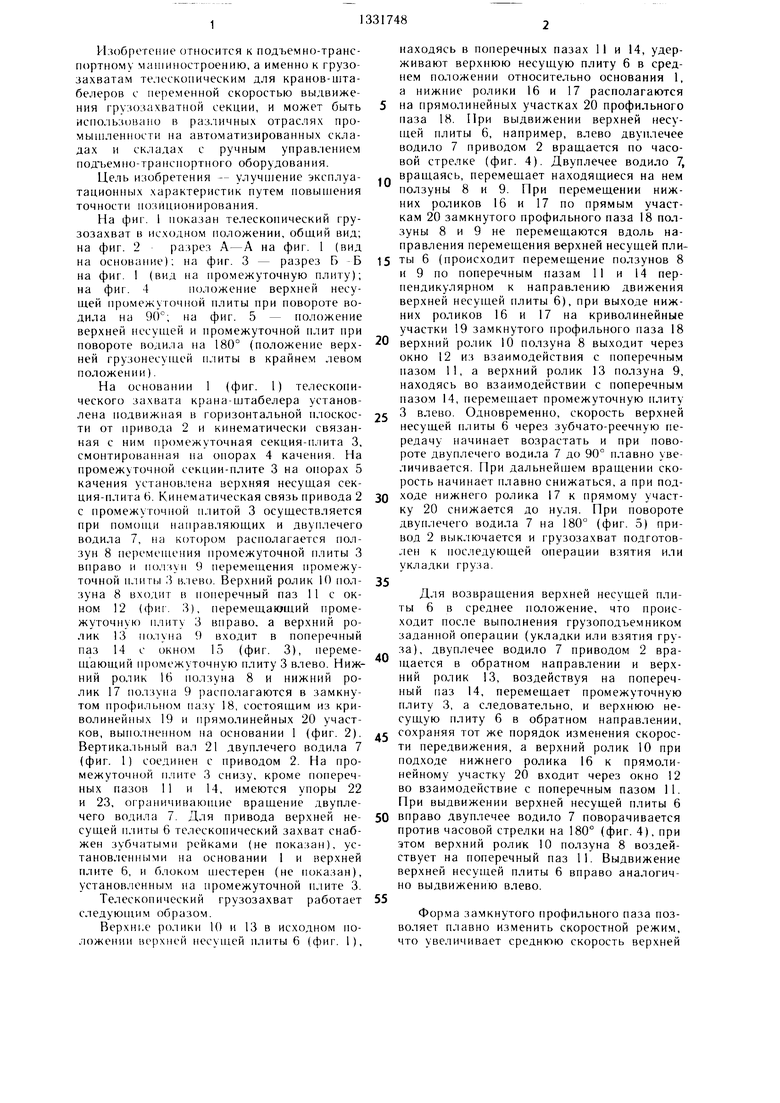
| название | год | авторы | номер документа |
|---|---|---|---|
| Телескопический грузозахват стеллажного крана-штабелера | 1986 |
|
SU1382768A1 |
| Телескопический захват | 1986 |
|
SU1321644A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1985 |
|
SU1341122A2 |
| Телескопический грузозахват | 1985 |
|
SU1252252A1 |
| Установка для подачи листов к гильотинным ножницам | 1981 |
|
SU1016093A1 |
| Телескопический захват (его варианты) | 1982 |
|
SU1104061A1 |
| Разбрасыватель минеральных удобрений на склонах | 1985 |
|
SU1306503A2 |
| Телескопический захват | 1986 |
|
SU1463646A1 |
| КРЫЛО САМОЛЕТА | 1993 |
|
RU2072942C1 |
| Машина для внесения минеральных удобрений в почву | 1984 |
|
SU1232164A1 |
Изобретение относится к подъемно- транспортному машиностроению, в частности к телескопическим захватам кранов-штабеле- ров. Цель изобретения - улучшение эксплуатационных характеристик путем повышения точности позиционирования. Телескопический захват содержит основание 1, грузонесуш.ую секцию-плиту 6 и промежуточную секцию-плиту 3, на которой имеются поперечные пазы, открытые с одного конца для захода в них роликов 10, прикрепленных к верхним поверхностям ползунов 8 и связанных с кулисой 7, поворотной на 180° в реверсивном режиме. На основании выполнен замкнутый паз 18, имеющий размещенные вдоль основания 1 криволинейные участки и поперек основания прямолинейные участки. В пазу 18 размещены ролики 16 ползунов 8. При выдвижении промежуточной секции-плиты 3 обеспечивается плавное изменение скорости, при этом прямолинейные участки паза обеспечивают точное позиционирование захвата относительно ячейки стеллажа. 5 ил. 5JП Ю 8 /// 7 13,614 сл 00 оо 00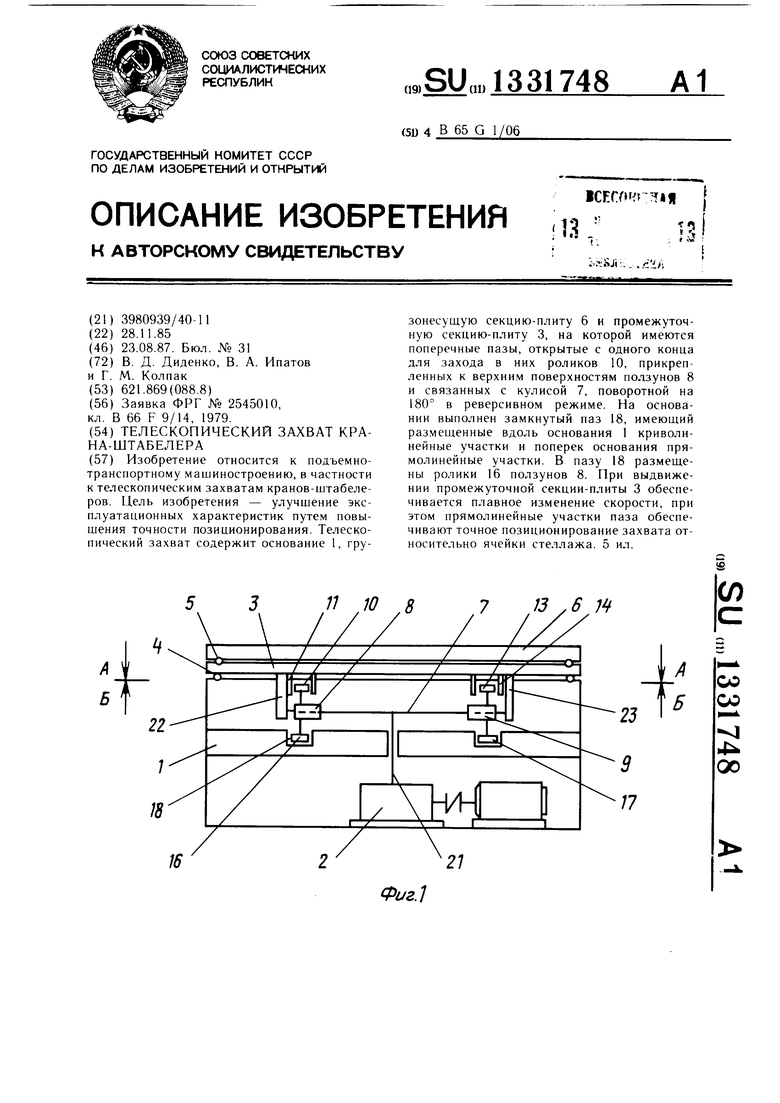
/5
Фиг.д
22 11 18 10
V
/V 23
LL
Фиг.
7V
.S
| СПОСОБ ПОЛУЧЕНИЯ ПИТАТЕЛЬНОЙ ОСНОВЫ МИКРОБИОЛОГИЧЕСКИХ СРЕД | 2014 |
|
RU2545010C1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
