(21)4153571/40-11
(22)27.11.86
(46) 23.03.88. Бюл. № 11
(72) В. Д. Диденко, В. А. Ипатов
и Г. М. Колпак
(53)621.869(088.8)
(56)Авторское свидетельство (С( Р № 1081081, В 65 G 1/06, 19.01.83.
(54)ТЕЛЕСКО 1ИЧЕСКИЙ ГРУЗОЗАХ- ВАТ СТЕ-;ЛЛАЖН()Г() КРАИА-ШТАБЕ- ЛНРА
(57)Изобретение относится к подъемно- транспортному манжностроению, а именно к телесконическим за.хватам стеллажных кра- нов-п1табеле)ов. Цель изобретения - снижение энергонотребления. Грузозахват состоит из кинематически связанных между собой грузонесунхих секций 2 и базовой секции 3, перемещающихся одна относительно другой. На базовой секции 3 в горизонтальной плоскости установлена тяговая цепь, к одному из звеньев которой закреплена пол- зушка Г), входящая в поперечный паз 6 п)омежугочной секции 2, и привод 7 выд/ Zf
// /
вижения и подьема грузонесущей секции I. Базовая секция 3 связана с механизмом вертикального перемепгения, выполненным в виде подъемной опоры, расположенной по центру базовой секции 3. Подъемная опора выполнена в виде вертикального равноплечего вала 12, кинематически связанного зубчатым колесом 11 с приводом 7 выдвижения грузонесуп1ей секции 1. На концах равноплечего рычага 13 расположены катки 14, установленные в кольцевой паз 15, закрепленный на раме 16 грузоподъемника, на верхней и нижней плоскостях которого расположены равномерно по окружности направляющие 17. Причем паправляюшие 19 верхней плоскости симметрично смещены относительно направляющих 17 нижней плоскости, образуя зазор, равный диаметру катка 14, а между базовой секцией 3 и рамой 16 грузоподъемника установлены компепсаторы в виде пружин для нодъема базовой секции 3. При подъеме базовой секции 3 происходит подьем грузонесуп1ей секции 1 и груза. 3 ил.
J ff11
I //
д 8
ю
7
с
оо 00 to
05 00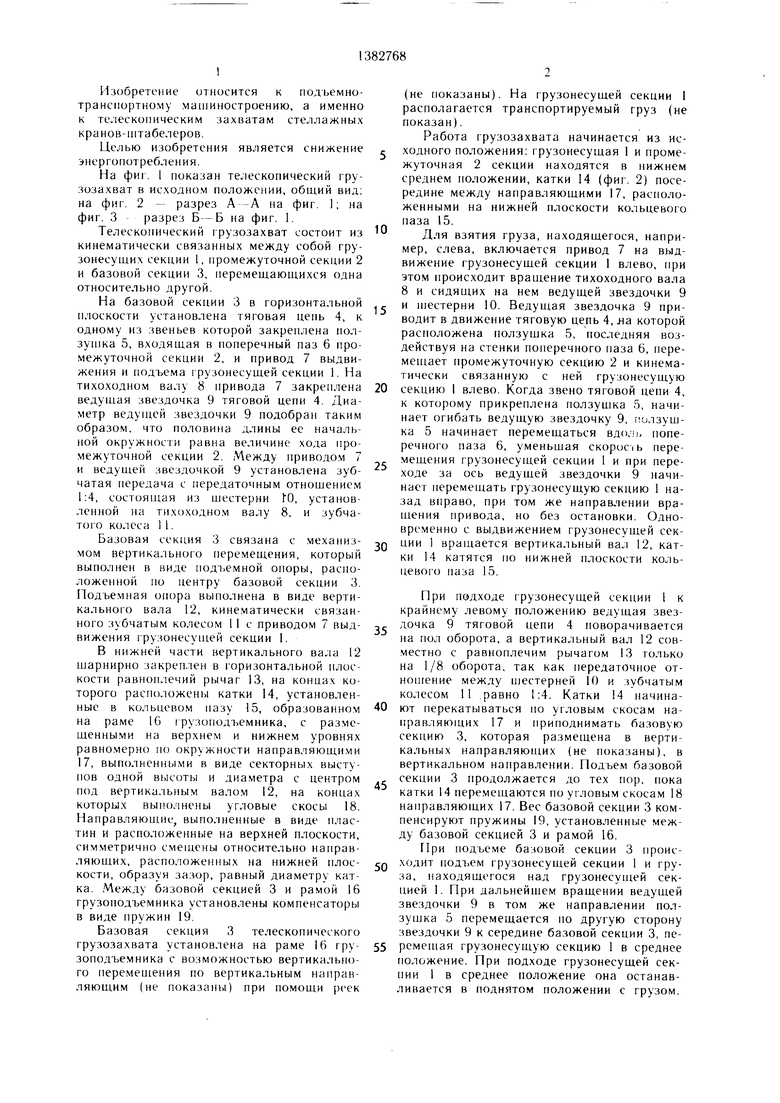
| название | год | авторы | номер документа |
|---|---|---|---|
| Телескопический грузозахват | 1983 |
|
SU1081081A1 |
| Телескопический грузозахват | 1985 |
|
SU1252252A1 |
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1983 |
|
SU1181953A1 |
| Грузоподъемная площадка крана-штабелера | 1982 |
|
SU1119946A1 |
| Телескопический захват | 1986 |
|
SU1463646A1 |
| Грузоподъемная площадка крана-штабе-лЕРА | 1979 |
|
SU844519A1 |
| Грузозахват стеллажного кранаштабелера | 1988 |
|
SU1594080A1 |
| Захват к крану-штабелеру | 1980 |
|
SU992418A1 |
| СПОСОБ ОБМЕНА ГРУЗАМИ, УСТРОЙСТВО ОБМЕНА ГРУЗАМИ, СПОСОБ ФОРМИРОВАНИЯ ГРУЗОНЕСУЩЕЙ ПОВЕРХНОСТИ НАКОПИТЕЛЯ И ГИБКАЯ ПРОИЗВОДСТВЕННАЯ СИСТЕМА НА ИХ ОСНОВЕ | 2011 |
|
RU2486045C1 |
| Загрузочное устройство | 1984 |
|
SU1222604A1 |

А 5
./) В
Изобретение относится к подъемно- транспортному ма1пиностроению, а именно к телескопическим захватам стеллажных кра нов-111та бел еров.
Целью изобретения является снижение энергопотребления.
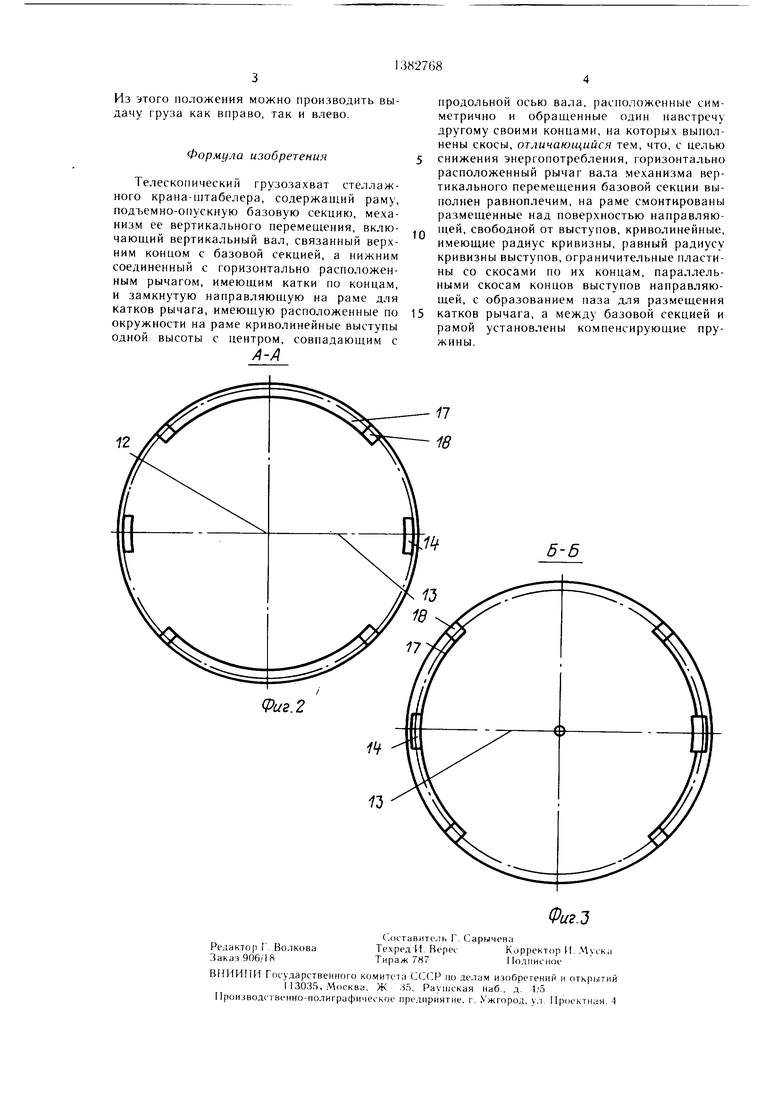
На фиг. I показан телескопический гру- зозахват в исходно.м положении, общий вид; на фиг. 2 - разрез А -А на фиг. 1; на фиг. 3 разрез Б-Б на фиг. 1.
Телескопический грузозахват состоит из кинематически связанных между собой гру- зонесуших секции I, промежуточной секции 2 и базовой секции 3, перемещающихся одна относительно другой.
На базовой секции 3 в горизонтальной плоскости установлена тяговая цепь 4, к одному из звеньев которой закреплена иол- зуц1ка 5, входящая в поперечный паз 6 промежуточной секции 2, н привод 7 выдвижения и подъема грузонесущей секции 1. На тихоходном валу 8 привода 7 закреплена ведущая звездочка 9 тяговой цепи 4. Диаметр ведущей звездочки 9 подобран таким образом, что половина длины ее начальной окружности равна величине хода про- .межуточной секции 2. Между приводом 7 и ведущей звездочкой 9 установлена зубчатая передача с передаточным отнощением 1:4, состоящая из щестерни fO, установленной на тнхоходно.м валу 8, и зубчатого колеса 11.
Базовая секция 3 связана с механизмом вертикального перемещения, который выполнен в ниде под ьемной опоры, расположенной по центру базовой секции 3. Подъемная опора выполнена в виде вертикального вала 12, кине.матически связанного зубчатым колесом 11 с приводом 7 выд- вижения грузонесущей секции 1.
В нижней части вертикального вала 12 щарнирно закреплен в горизонтальной плоскости равноплечий рычаг 13, на концах которого расположены катки 14, установленные в кольцевом назу 15, образованном на раме 1G грузоподъемника, с раз.ме- щенными на верхнем и нижнем уровнях равномерно по окружности направляющими 17, выполненн1 1ми в виде секторных выступов одной высоты и диаметра с центром под вертикальным валом 12, на концах которых выполнены угловые скосы 18. Направляющие, выполненные в виде пластин и расположенные на верхней плоскости, симметрично смещены относительно направляющих, расположенных на нижней плоскости, образуя зазор, равный диаметру катка. Между базовой секцией 3 и рамой 16 грузоподъемника установлены компенсаторы в виде пружин 19.
Базовая секция 3 телескопического грузозахвата установлена на раме 16 гру- зоподъемника с возможностью вертикального перемещения по вертикальным направляющим (не показаны) при помощи реек
5
,
0
0
5
55
0
45
50
(не показаны). На грузонесущей секции 1 располагается транспортируемый груз (не показан).
Работа грузозахвата начинается из исходного положения: грузонесущая 1 и промежуточная 2 секции находятся в нижнем среднем положении, катки 14 (фиг. 2) посередине между направляющими 17, расположенными на нижней плоскости кольцевого паза 15.
Для взятия груза, находящегося, например, слева, включается привод 7 на выдвижение грузонесущей секции 1 влево, при этом происходит вращение тихоходного вала 8 и сидящих на нем ведущей звездочки 9 и Н1естерни 10. Ведущая звездочка 9 приводит в движение тяговую цепь 4, ла которой расположена ползущка 5, последняя воздействуя на стенки поперечного паза 6, перемещает промежуточную секцию 2 и кинематически связанную с ней грузонесущую секцию I влево. Когда звено тяговой цепи 4, к которому прикреплена ползушка 5, начинает огибать ведущую звездочку 9, Г11;лзущ- ка 5 начинает перемещаться вдо.) поперечного паза 6, уменьщая скорость перемещения грузонесущей секции 1 и при переходе за ось ведущей звездочки 9 начинает перемещать грузонесущую секцию 1 назад вправо, при том же направлении вращения привода, но без остановки. Одновременно с выдвижением грузонесущей секции 1 вращается вертикальный вал 12, катки 14 катятся по нижней плоскости коль- цево1Ч) паза 15.
При подходе грузонесущей секции 1 к крайнему левому положению ведущая звездочка 9 тяговой цепи 4 поворачивается на пол оборота, а вертикальный вал 12 совместно с равноплечим рычагом 13 только на 1/8 оборота, так как передаточное отношение между ц естерней 10 и зубчатым колесом 11 .равно 1:4. Катки 14 начинают перекатываться по угловым скосам направляющих 17 и приподнимать базовую секцию 3, которая размещена в вертикальных направляющих (не показаны), в вертикальном направлении. Подъем базовой секции 3 продолжается до тех пор, пока катки 14 перемещаются по угловым скосам 18 направляющих 17. Вес базовой секции 3 компенсируют пружины 19, установленные между базовой секцией 3 и рамой 16.
При подъеме базовой секции 3 происходит г1ОД11ем грузонесущей секции 1 и груза, находящегося над грузонесущей секцией 1. При дальнейшем вращении ведущей звездочки 9 в том же направлении ползущка 5 перемещается по другую сторону звездочки 9 к середине базовой секции 3, перемещая грузонесущую секцию 1 в среднее положение. При подходе грузонесущей сек- 1ИИ 1 в среднее положение она останавливается в поднятом положении с грузом.
Из атого положения можно производить выдачу груза как вправо, так и влево.
Формула изобретения
Телескопический грузозахват стеллажного крана-штабелера, содержащий раму, подъемно-опускную базовую секцию, механизм ее вертикального перемеа1ения, включающий вертикальный вал, связанный верхним концом с базовой секцией, а нижним соединенный с горизонтально расположенным рычагом, имеющим катки по концам, и замкнутую направляющую на раме для катков рычага, имеющую расположенные по окружности на раме криволинейные выступы одной высоты с центром, совпадающим с
-/
12
Редактор Г . Волкова Заказ 906/18
С.оставитель Г. Сарычева
Техред И. BepefКорректор И. Муска
Тираж 787Полтшсиое
ВНИИГ1Н Государственного комитета С(( Р по делам изобретений и открытий
I 13035, .Москва, Ж 35, Раушская наб-. д. 1, 5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная. 4
0
5
продольной осью вала, расположенные симметрично и обращенные один навстречу другому своими концами, на которых выполнены скосы, отличающийся тем, что, с целью снижения энергопотребления, горизонтально расположенный рычаг вала механизма вертикального перемещения базовой секции выполнен равноплечим, на раме смонтированы размещенные над поверхностью направляющей, свободной от выступов, криволинейные, имеющие радиус кривизны, равный радиусу кривизны выступов, ограничительные пластины со скосами по их концам, параллельными скосам концов выступов направляющей, с образованием паза для размещения катков рычага, а между базовой секцией и рамой установлены компенсирующие пружины.
Фиг.:
