1
Изобретение относится к промышленному транспорту, а именно к устройствам дпя управления приводом телескопического захвата стеллажного крана-штабелера.
Цель - упрощение конструкции.
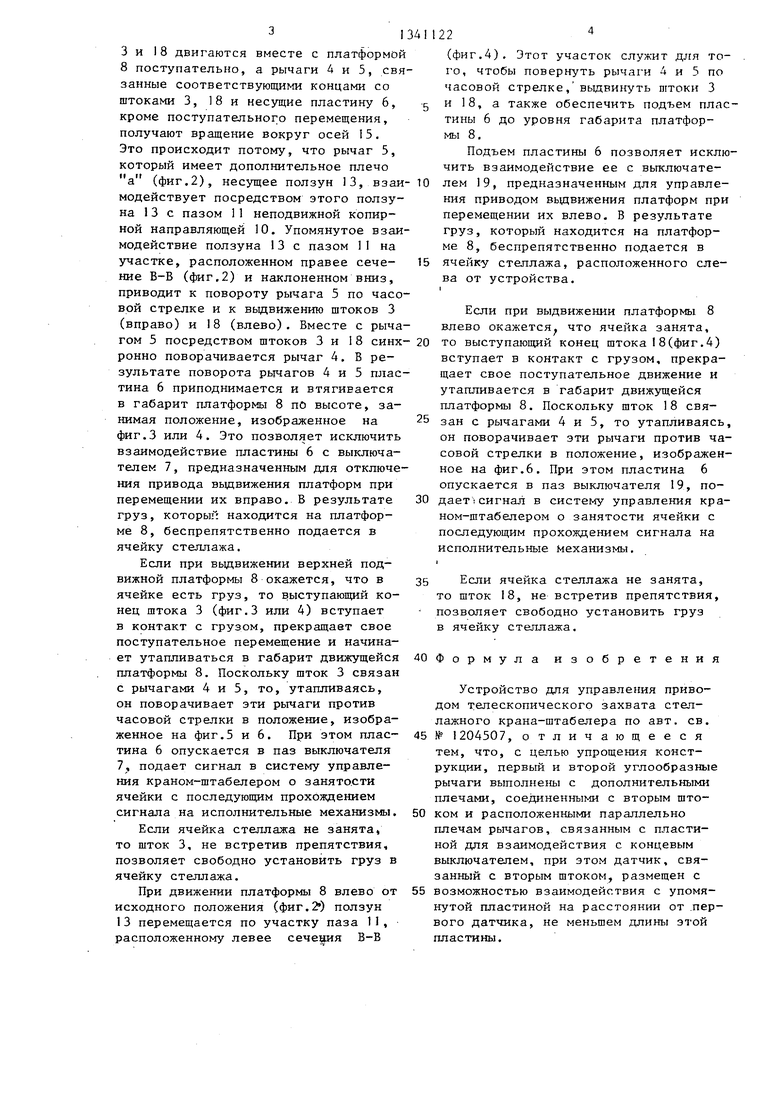
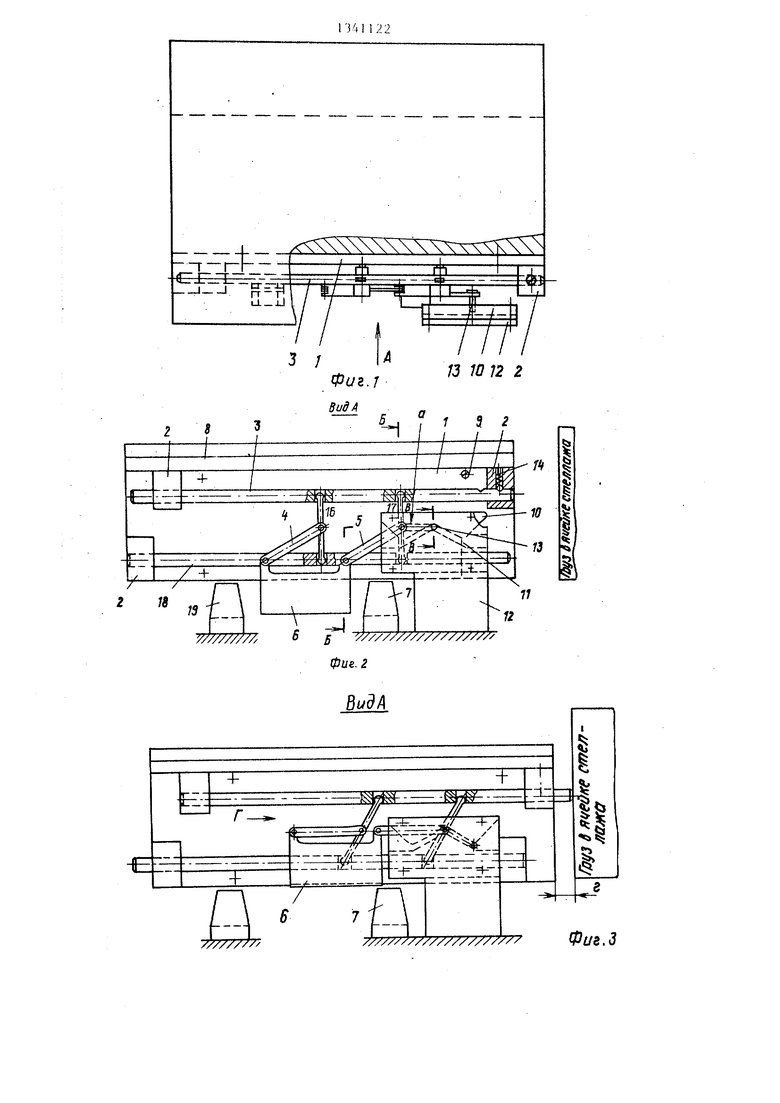
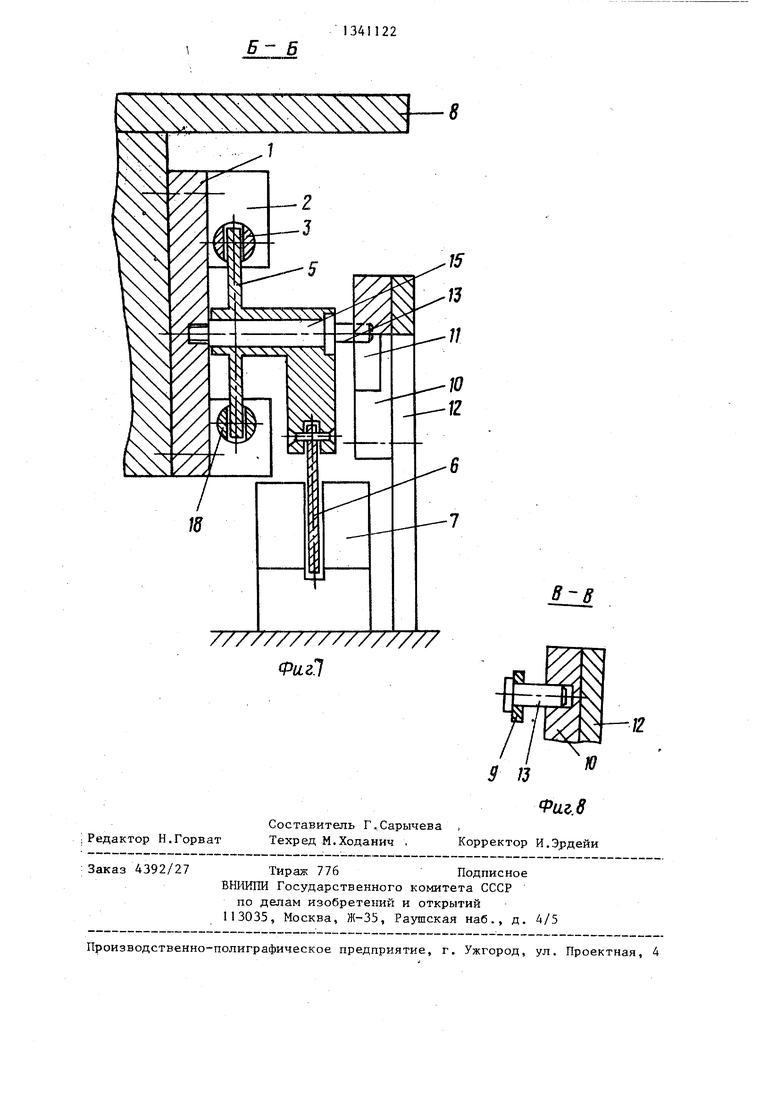
На фиг,Г изображено предложенное устройство, вид в плане; на фиг.2. - вид А на фиг.1, исходное положение; на фиг.З и 4 - то же, штоки полностью выдвинуты; на фиг.5 и 6 - тоже штоки утоплены в результате взаимодействия любого из них с препятствием; на фиг.7 - сечение Б-Бнафиг„2; на фиг.8 - сечение В-В на фиг.2.
Устройство содержит основание 1, выполненное, например, в виде плиты и прикрепленное к грузонесущей платформе захвата.
На основании 1 в направляющих втулках 2 установлен шток 3 с выступающей частью, расположенной справа (фиг.З). Шток 3 кинематически связан посредством углообразньк рычагов 4 и 5 с пластиной 6, имеющей возможность для взаимодействия с вык 1ючателем 7, предназначенным для выключения привода при выдвижении верхней и промежуточной платформ грузоподъемника вправо (привод вьщвижения платформы, а также промежуточная и неподвижная платформы грузоподъемника не показаны) .
Основание 1 устройства прикреплено к верхней подвижной платформе 8, например, при помощи винтов 9. Рычаг 5, кроме наличия кинематической связи со штоком 3 и пластиной 6, дополнительно кинематически связан с неподвижной Частью грузоподъемника. Эта связь осуществляется при помощи неподвижной копирной направляющей 10 с направляющим пазом 11. Копирная
1
направляющая 10 установлена на непод- 45 вправо (привод грузоподъемника на
вижной платформе грузоподъемника при помощи кронштейна 12. В пазу 11 расположен ползун 13, выполненный, например, в виде ролика и прикрепленный к одному из плеч упомянутого рычага 5 (фиг.2) .
Для удержания штока 3 от самопроизвольного перемещения он снабжен подпружиненным фиксатором 14.
Паз П имеет профиль, сообщающий ползуну 13, а через него посредством оси 15 рычагу 5, штоку 3 и рычагу 4 характер движенийу необходимый для выполнения двух действий; во
3411222
первых, для вьщвижения штока 3 в сторону перемещения подвижной платформы 8; во-вторых, для удержания пласg тины 6 над выключателем 7, когда конец штока 3 не встречает препятствия и для ввода пластины 6 в зону взаимодействия с выключателем 7 в случае встречи конца штока 3 с препятствием
10 и взаимодействия с ним.
Для обеспечения изложенных действий устройства при перемещении подвижной платформы 8 как вправо от исходного положения, так и влево от
15 него, углообразные, рычаги 4 и 5 выполнены с дополнительными параллельными плечами 16 и 17 (фиг.2). Концы дополнительных плечей, направлены относительно осей вращения рычагов в
20 сторону, диаметрально противоположную плечам рычагов, взаимодействующих со штоком 3. Дополнительные плечи 16 и 17 подвижно установлены в пазах второго штока 18, который па25 раллелен штоку 3 и расположен по другую сторону осей 15, предназначенных для поворота рычагов 4 и 5.
На фиг.7 изображено сечение с примером конструкции осей 15.
30 Второй выключатель 19 предназначен для управления приводом телескопического захвата при выдвижении платформы 8 влево Выключатели 19 и 7 в исходном положении устройства
35 расположены по обе стороны от пластины 6.
Устройство работает следующим образом.
Стеллажный кран-штабелер с грузом,
40 установленным на верхней подвижной платформе 8 (груз условно не показан) грузоподъемника, при подходе к ячейке стеллажа включает привод вьщвижения платформы грузоподъемника
чертежах условно не показан). Верхняя подвижная платформа 8 с грузом начинает вьщвижение в направлении стрелки Г или Д (фиг.З или .4). Одновременно с вьщвижением верхней подвижной платформы 8 вьщвигаются штоки 3(вправо) и 18 (влево).
Это происходит по следующей причине. Платформа 8 при вьщвижении
вправо несет на себе основание 1 устройства для управления приводом те- лескопического захвата, а также штоки 3 и 18, углообразные рычаги 4 и 5 и пластину 6. Основание 1 и штоки
3I
3 и 18 двигаются вместе с платформой 8 поступательно, а рычаги 4 и 5, связанные соответствующими концами со штоками 3, 18 и несущие пластину 6, кроме поступательного перемещения, получают вращение вокруг осей 15. Это происходит потому, что рычаг 5, который имеет дополнительное плечо а (фиг.2), несущее ползун 13, взаи модействует посредством этого ползуна 1 3 с пазом 11 неподвижной копир- ной направляющей 10. Упомянутое взаимодействие ползуна 13 с пазом 11 на участке, расположенном правее сече- ние В-В (фиг.2) и наклоненном вниз, приводит к повороту рычага 5 по часовой стрелке и к вьщвижению штоков 3 (вправо) и 18 (влево). Вместе с рычагом 5 посредством штоков 3 и 18 синх ронно поворачивается рычаг 4. В результате поворота рычагов 4 и 5 пластина 6 приподнимается и втягивается в габарит платформы 8 по высоте, занимая положение, изображенное на фиг.З или 4. Это позволяет исключить взаимодействие пластины 6 с выключателем 7, предназначенным для отключения привода выдвижения платформ при перемещении их вправо, В результате груз, который находится на платформе 8, беспрепятственно подается в ячейку стеллажа.
Если при выдвижении верхней подвижной платформы 8 окажется, что в ячейке есть груз, то выступающий конец штока 3 (фиг.З или 4) вступает в контакт с грузом, прекращает свое поступательное перемещение и начинает утапливаться в габарит движущейся платформы 8. Поскольку шток 3 связан с рычагами 4 и 5, то, утапливаясь, он поворачивает эти рычаги против часовой стрелки в положение, изображенное на фиг.З и 6. При этом плас- тина 6 опускается в паз выключателя 7, подает сигнал в систему управления краном-штабеяером о занято.сти ячейки с последующим прохождением сигнала на исполнительные механизмы.
Если ячейка стеллажа не занята, то шток 3, не встретив препятствия, позволяет свободно установить груз в ячейку стеллажа.
При движении платформы 8 влево от исходного положения (фиг.2) ползун 13 перемещается по участку паза П, расположенному левее сечеаия В-В
122
(фиг.4), Этот участок служит для того, чтобы повернуть рычаги 4 и 5 по часовой стрелке, вьщвинуть штоки 3 и 18, а также обеспечить подъем платины 6 до уровня габарита платформы 8.
Подъем пластины 6 позволяет исключить взаимодействие ее с выключателем 19, предназначенным для управления приводом выдвижения платформ при перемещении их влево, В результате груз, который находится на платформе 8, беспрепятственно подается в ячейку стеллажа, расположенного слева от устройства.
Если при выдвижении платформы 8 влево окажется что ячейка занята, то выступающий конец штока I 8(фиг.4) вступает в контакт с грузом, прекращает свое поступательное движение и утапливается в габарит движущейся платформы 8. Поскольку шток 18 связан с рычагами 4 и 5, то утапливаясь он поворачивает эти рычаги против часовой стрелки в положение, изображенное на фиг,6. При этом пластина 6 опускается в паз выключателя 19, подает; сигнал в систему управления кра ном-штабелером о занятости ячейки с последующим прохождением сигнала на
исполнительные механизмы. I
Если ячейка стеллажа не занята, то шток 18, не встретив препятствия, позволяет свободно установить груз в ячейку стеллажа.
Формула изобретения
Устройство для управления приводом телескопического захвата стеллажного крана-штабелера по авт. ев, № 1204507, отличающееся тем, что, с целью упрощения конструкции, первый и второй углообразные рычаги выполнены с дополнительными плечами, соед1 ненными с вторым штоком и расположенными параллельно плечам рычагов, связанным с пластиной для взаимодействия с концевым выключателем, при этом датчик, связанный с вторым штоком, размещен с возможностью взаимодействия с упомянутой пластиной на расстоянии от .первого датчика, не меньшем длины этой пластины.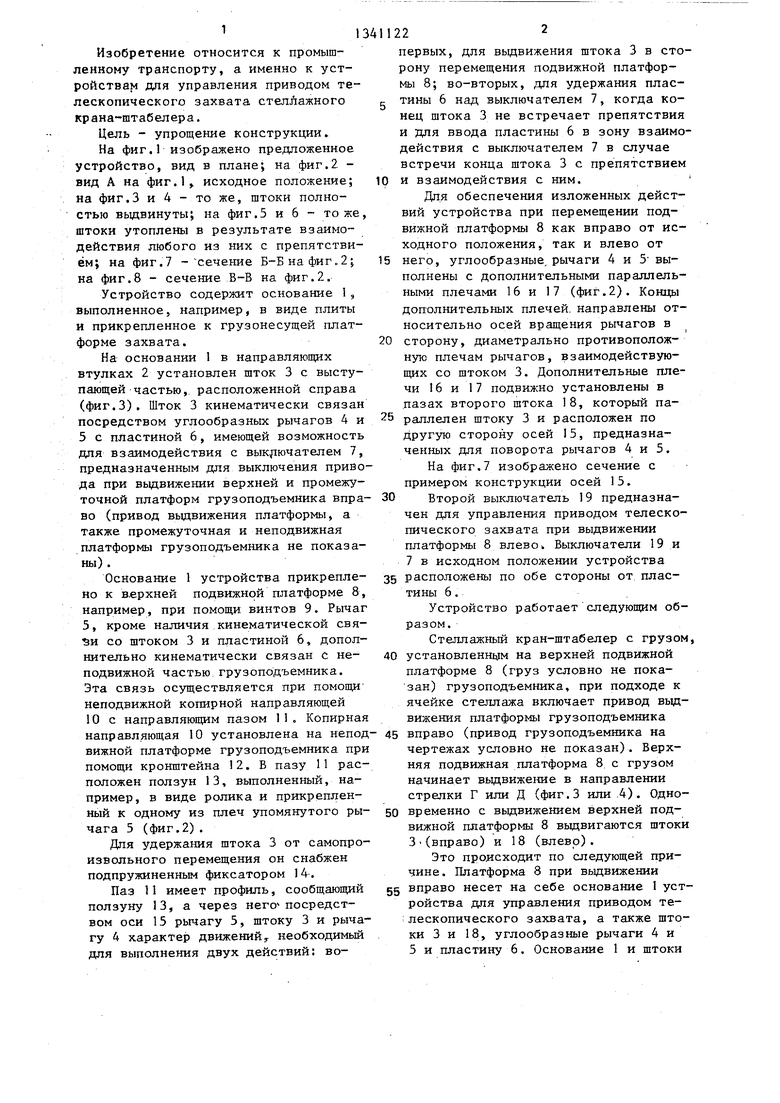
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1984 |
|
SU1204507A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1988 |
|
SU1643341A1 |
| Устройство для управления телескопическим захватом стеллажного крана-штабелера | 1982 |
|
SU1008156A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1982 |
|
SU1034929A1 |
| Устройство для управления приводом выдвижения телескопического захвата стеллажного крана-штабелера | 1982 |
|
SU1062138A1 |
| Устройство для контроля занятости ячейки стеллажного крана-штабелера | 1974 |
|
SU567648A1 |
| Устройство для ориентации платформы стеллажного крана-штабелера | 1982 |
|
SU1071535A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1985 |
|
SU1306852A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1990 |
|
SU1733346A1 |
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1988 |
|
SU1518229A2 |
Изобретение относится к промьш- ленному транспорту. Цель изобретения - упрощение конструкции. Устройство содержит два штока 3 и 18, связанные друг с другом и копиром 12 дополнительными плечами углообразных рычагов 4 и 5. Дополнительные тяги расположены параллельно плечам рычагов, соединенным с пластиной 6. Датчик 19, связанный с штоком 18, установлен с возможностью взаимодействия с пластиной 6 на расстоянии, не меньшем длины последней. Копир 12 выполнен с расширяющимися входными участками, а на платформе I смонтирован подпружиненный фиксатор 14. Устройство работает при двустороннем вьщ- вижении захвата. Если при выдвижении верхней подвижной платформы 8 вправо оказывается, что в ячейке есть груз,, то конец штока 3 утапливается грузом, а пластина 6 опускается в паз выключателя 7, который подает команду при- с воду захвата. При вьщвижении влево шток 18 утапливается и перемещает пластину до взаимодействия с датчиком 19, также подающим сигнал приводу захвата. В исходное положение штоки возвращаются одним копиром. 8 ил. (П ГЧ)
//////
X/VVV/ /VVVVV/
/77777//,
Фи&, ff
Вид/
Фиг, 5
///////////
BuBA
///////////////////////////
фмв. 5
Фаг
Редактор Н.Горват
и.8
Составитель Г.Сарычева ,
Техред М.Ходанич ,Корректор И.Эрдейи
Заказ 4392/27 Тираж 776Подписное
ВНИКЛИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д, 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Устройство для управления приводом телескопического захвата стеллажного крана-штабелера | 1984 |
|
SU1204507A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
