Изобретение относится к подъемно-транспортному машиностроению, а именно к телескопическим захватам транспортных роботов, стеллажных кранов - штабелеров.
Цель изобретения - повышение производительности.
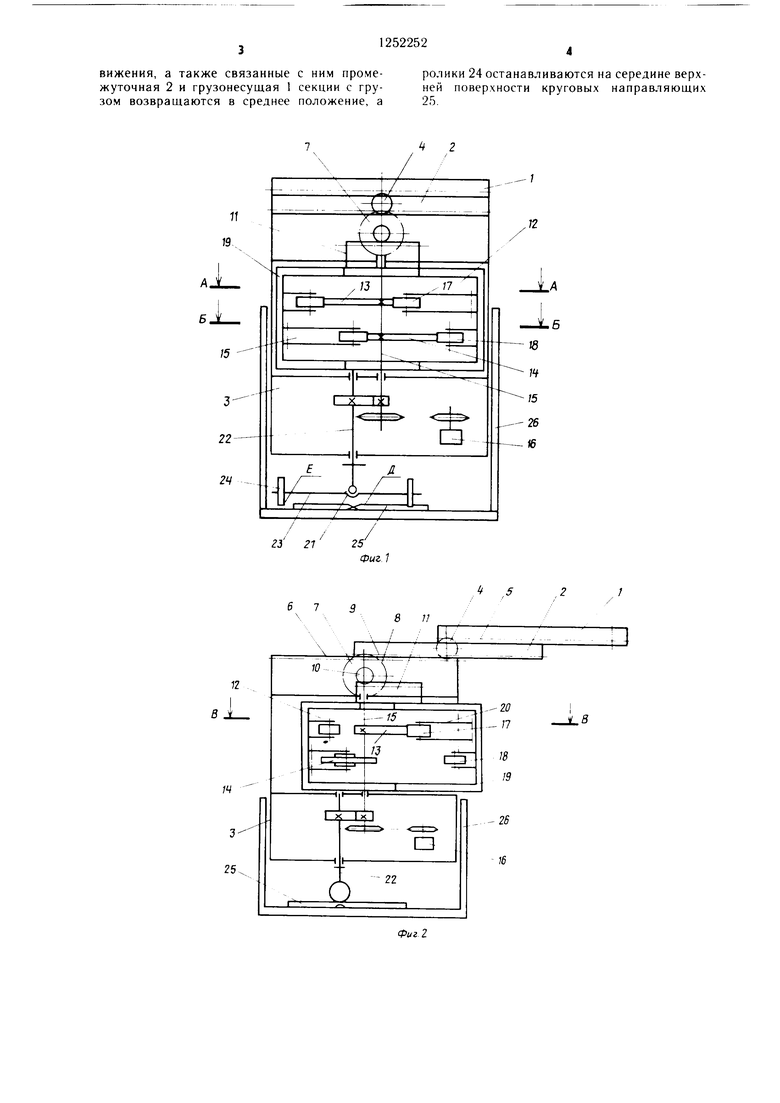
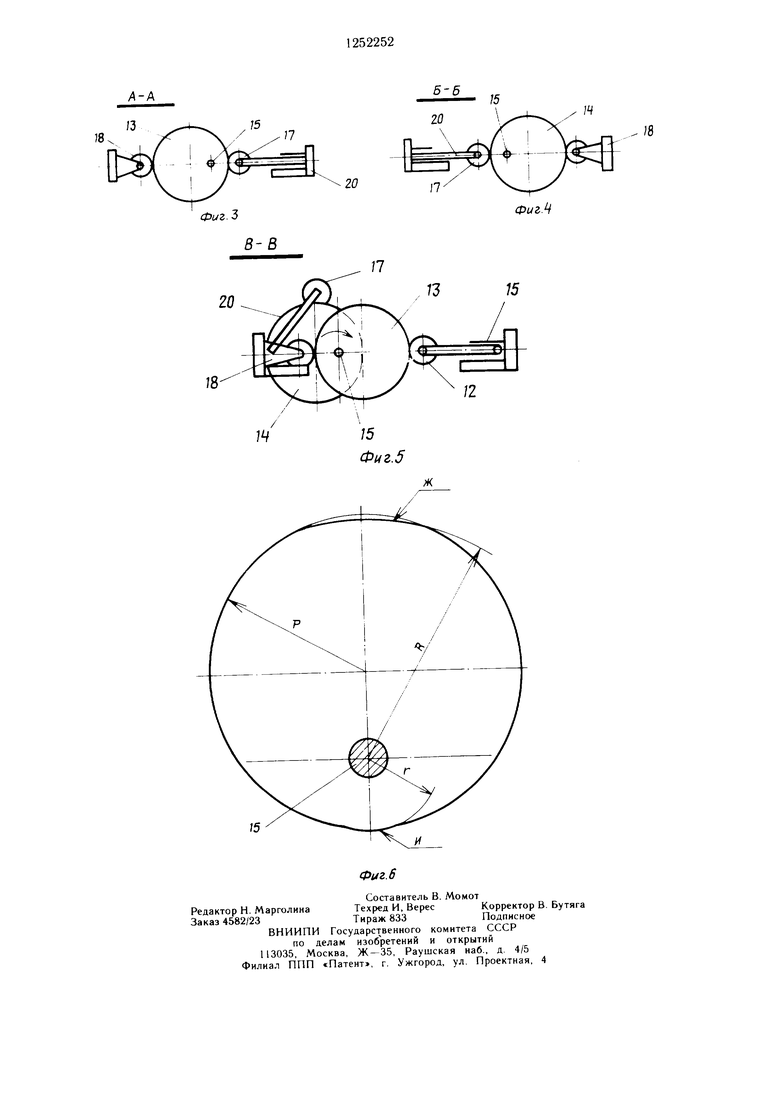
На фиг. 1 показан телескопический гру- зозахват, в исходном положении, обший вид-, на фиг. 2 - то же, в момент захвата груза; на фиг. 3 -- сечение А -А на фиг. 1; на фиг. 4 сечение Б-Б на фиг. 1; на фиг. 5 - разрез В -В на фиг. 2; на фиг. 6 - профиль эксцентричного диска.
Телескопический грузозахват состоит из кинематически связанных между собой гру- зонесущей 1, промежуточной 2 и базовой 3 секций, которые выполнены с возможностью перемешения по направляющим (не показаны) промежуточной 2 относительно базовой 3 и грузонесущей 1 относительно промежуточной 2 секций.
На промежуточной секции 2 установлена шестерня 4, кинематически связанная рейкой 5 с грузонесущей секцией; а рейкой 6 с базовой секцией 3.
На базовой секции 3 установлен блок шестерен 7, представляюший собой коробку передач, шестерня 8 которого кинематически связана рейкой 9 с промежуточной секцией 2, а иестерня 10 - рейкой 11 с приводом 12 горизонтального выдвижения, который состоит из двух эксцетричных дисков 13 и 14, жестко закрепленных со взаимным смеш,ением на 180° в горизонтальной плоскости на вертикальном валу 15, кинематически связанном с ведущим валом привода 16. Диаметрально по отношению к каждому диску 13 и 14 смонтирована пара роликов 17 и 18, закрепленная на ползуне 19 привода 12 горизонтального выдвижения, кинематически связанного посредством рейки 1 1 и блока шестерен 7, установленного на базовой секции 3, с промежуточной 2 и грузонесущей 1 секциями, причем ролик 17 шарнирно закреплен на подпружиненном рычаге 20 с возможностью отклонения в одну сторону. Вертикальный вал 15 кинематически связан с роликоопорой 21 валом 22, который посредством рычагов 23 соединен с роликами 24. Последние смонтированы с возможностью перемещения по круговым направляющим 25, имеющим верхние и нижние поверхности, соединенные между собой наклонными поверхностями и через упоры вала 22 имеющие возможность вертикально перемещать по вертикальным направляющим базовую секцию 3 с успаионлси ными на ней промежуючной 2 и рузоиесу- щей 1 секциями.
Профили дисков 13 и 14 вьпюлнеиы с двумя диаметрально расположенными участками W и Ж в виде дуг окружностей с цет- ром, совпадающим с осью врап1ения диска.
1
1252252
В исходном положении грузозахвата грузонесущая 1, промежуточная 2 секции и ползун 19 привода горизонтльного выдвижения находятся в нижнем среднем положении, ролики 24 расположены на нижней поверхности круговых направляющих 25, к обоим дискам 13 и 14 (фиг. 3 и 4) прижаты ролики 17 и 18.
Для взятия груза, находящегося, например, справа, включается ведущий вал привода 16 на выдвижение грузонесущей 1 секции вправо. При этом происходит вра- щение ведущего вала привода 16 и кинематически связанных с ним вала 22 и вертикального вала 15 совместно с закрепленными на нем дисками 13 и 14, причем
диск 13, соприкасаясь с щарнирно закрепленным роликом 17, нажимает на него и перемещает ползун 19 привода 12 горизонтального выдвижения вправо (фиг. 2 и 5), диск 14, зажимая на п арнирно закрепленный ролик 17 с противоположной стороны, отклоняет его, что позволяет диску 14 беспрепятственно поворачиваться, а ползуну 19 перемещаться вправо. Вместе с ползуном 19 перемещается рейка 11 привода горизонтального выдвижения, привода во враS щемие шестерней 10 блок шестерен 7, одна из ujecTepeH которого через рейку 9 перемещает промежуточную секцию 2, при этом шестерня 4, закрепленная на промежуточной секции 2, обкатываясь по рейке 6 базовой секции 3, перемещает рейку 5, закреп- .1енную на грузонесущей секции 1.
Одновременно с выдвижением грузонесущей секции 1 вращается вал 22, ролико- опоры 21 и ролики 24 катятся по нижней поверхности круговых направляющих 25. При повороте диска 13 на пол-оборота
грузонесущая секция 1 выдвигается в крайнее положение, что достигается за счет выбора соответствующего передаточного отношения между блоком щестерен 7 и шестерней 4, а вал 22 и рычаг 23 роликоопоры
0 21 поворачивают только на четверть оборота, так как передаточное отношение зубчатой передачи между вертикальным валом 15 и валом 22 равно 1:2. Ролики 24 перекатываются по наклонным поверхностям (не показаны) круговых направляю1цих 25 и при5 поднимают базовую секцию 3, которая ограничена вертикальными направляющими 26 и сове)шаег то.:|ько вертикальные перемещения.
В момент базовой секции 3 ролики 17 и 18 соприкасаются с участками А/ и Ж (фиг. 6) профиля диска 13, благодаря чему перемещение грузонесущей секции не происходит, что улучшает уклад ку груза в стеллаж и его забор со стеллажа, а также обеспечивает четкость рабо5 ты грузозахвата.
При дальнейшем вращении в том же направлении диск 13 нажимает на ролик 18, и ползун 19 привода 12 горизонтального выд0
0
вижения, а также связанные с ним промежуточная 2 и грузонесущая 1 секции с грузом возвращаются в среднее положение, а
ролики 24 останавливаются на середине верхней поверхности круговых направляющих
25.
Л-А
5-5
)8
П
Фиг.З
ФигМ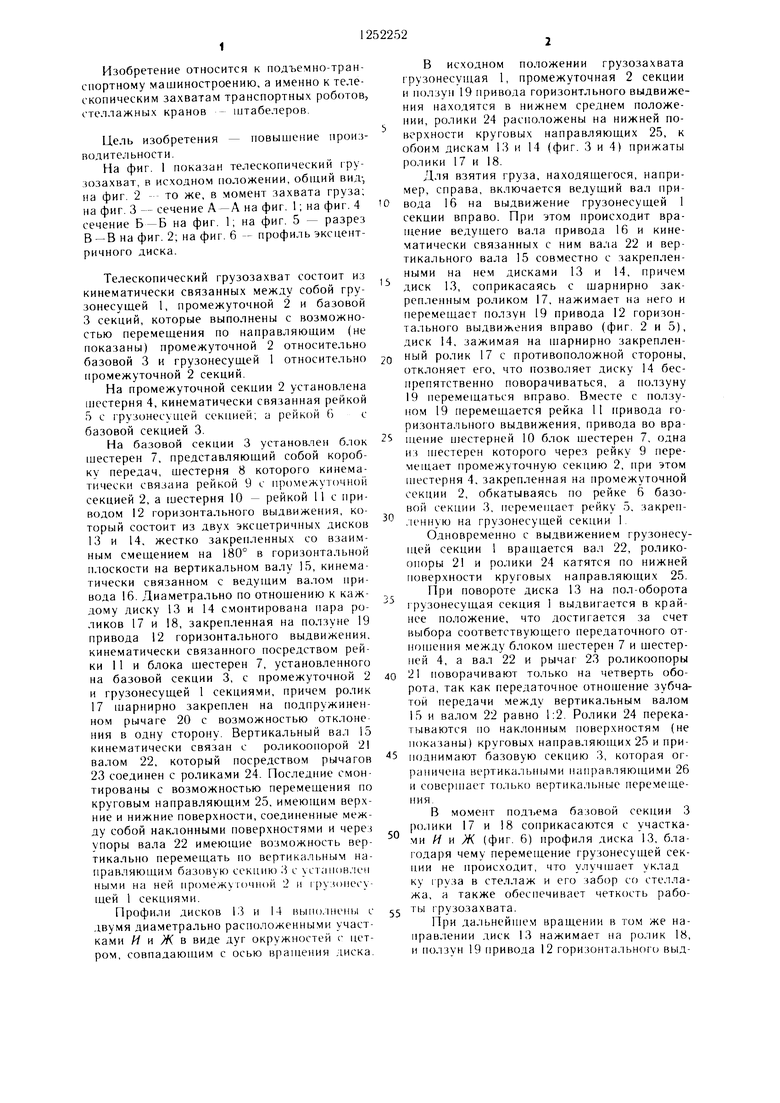
| название | год | авторы | номер документа |
|---|---|---|---|
| Телескопический захват крана-штабелера | 1985 |
|
SU1331748A1 |
| Телескопический грузозахват стеллажного крана-штабелера | 1986 |
|
SU1382768A1 |
| Грузоподъемная площадка крана-штабе-лЕРА | 1979 |
|
SU844519A1 |
| Телескопический грузозахват | 1983 |
|
SU1081081A1 |
| Грузоподъемная площадка стеллажного крана-штабелера | 1984 |
|
SU1174349A1 |
| СПОСОБ ОБМЕНА ГРУЗАМИ, УСТРОЙСТВО ОБМЕНА ГРУЗАМИ, СПОСОБ ФОРМИРОВАНИЯ ГРУЗОНЕСУЩЕЙ ПОВЕРХНОСТИ НАКОПИТЕЛЯ И ГИБКАЯ ПРОИЗВОДСТВЕННАЯ СИСТЕМА НА ИХ ОСНОВЕ | 2011 |
|
RU2486045C1 |
| Грузозахват стеллажного кранаштабелера | 1988 |
|
SU1594080A1 |
| Устройство для перегрузки пакетированных грузов | 1988 |
|
SU1643340A1 |
| Устройство для загрузки и выгрузкишТучНыХ гРузОВ из КРыТыХ жЕлЕзНОдО-РОжНыХ ВАгОНОВ | 1978 |
|
SU819021A1 |
| Грузоподъемная площадка крана-штабелера | 1982 |
|
SU1119946A1 |
/5
75
Фиг.б
Составитель В. Момот
Редактор Н. МарголинаТехред И, ВересКорректор В. Бутяга
Заказ 4582/23Тираж 833Подписное
ВНИИПИ Государствениого комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская иаб., д. 4/5
Филиал ППП «Патеит, г. Ужгород, ул. Проектная, 4
| Телескопический грузозахват | 1983 |
|
SU1081081A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Гребенчатая передача | 1916 |
|
SU1983A1 |
