(5) УСТРОЙСТВО для ПЕРЕДАЧИ ГРУЗОВ МЕЖДУ СУДАМИ В МОРЕ В УСЛОВИЯХ КАЧКИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для передачи грузов между судами в море в условиях качки | 1980 |
|
SU893700A1 |
| Система передачи грузов между судами в море в условиях качки | 1982 |
|
SU1013342A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1982 |
|
SU1057368A1 |
| Система передачи грузов между судами в море | 1988 |
|
SU1594063A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1982 |
|
SU1049342A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1981 |
|
SU969584A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1988 |
|
SU1601020A1 |
| Устройство для передачи грузов между судами в море в условиях качки | 1986 |
|
SU1357307A1 |
| Электропривод лебедок носовых канатов драги | 1986 |
|
SU1421827A1 |
| АСИНХРОННЫЙ ТЯГОВЫЙ ПРИВОД ЭЛЕКТРОПОЕЗДА | 2004 |
|
RU2299512C2 |
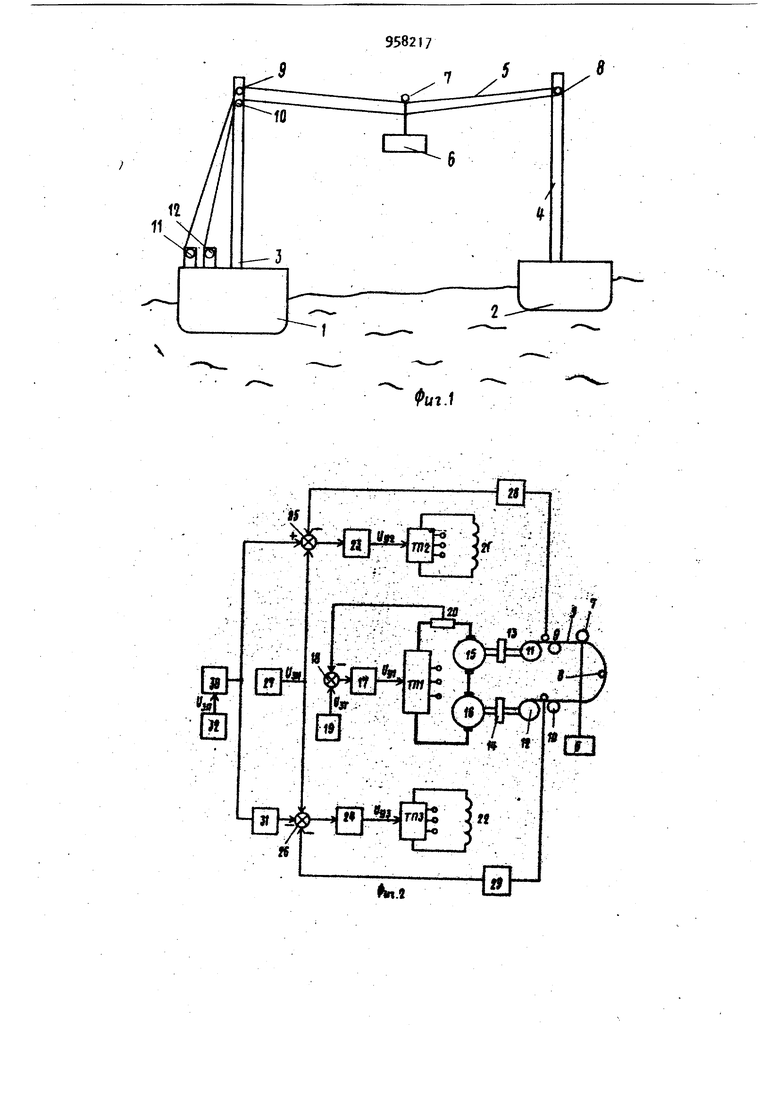
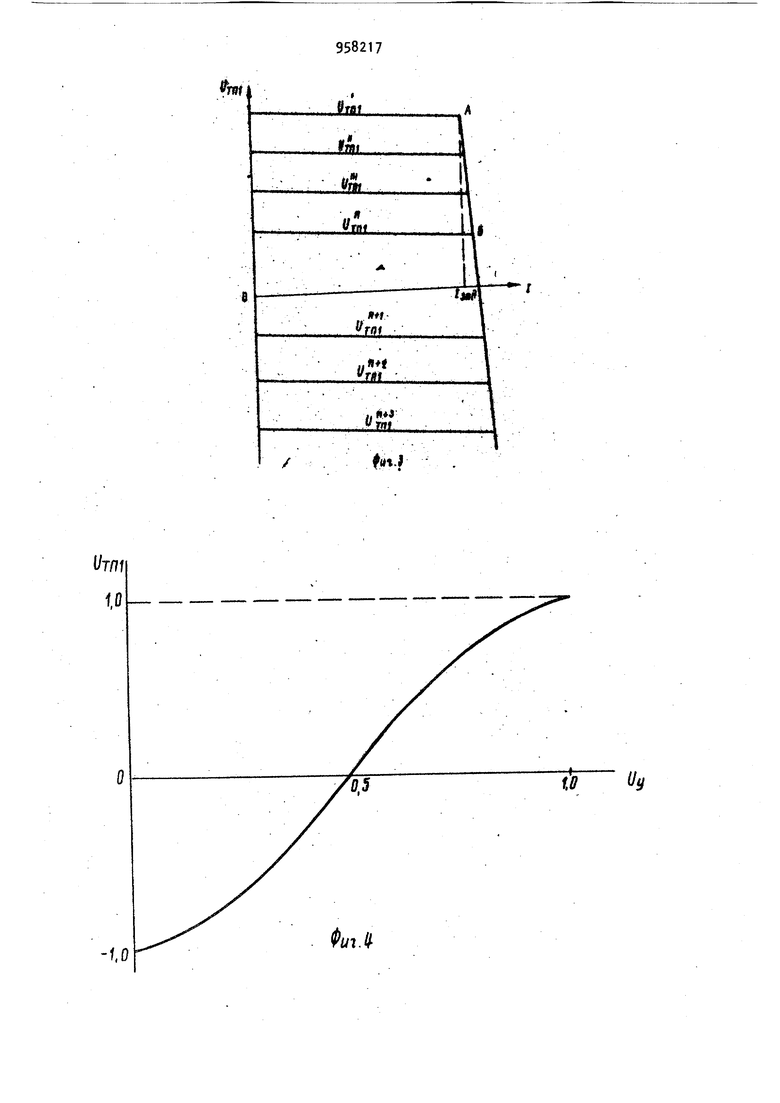
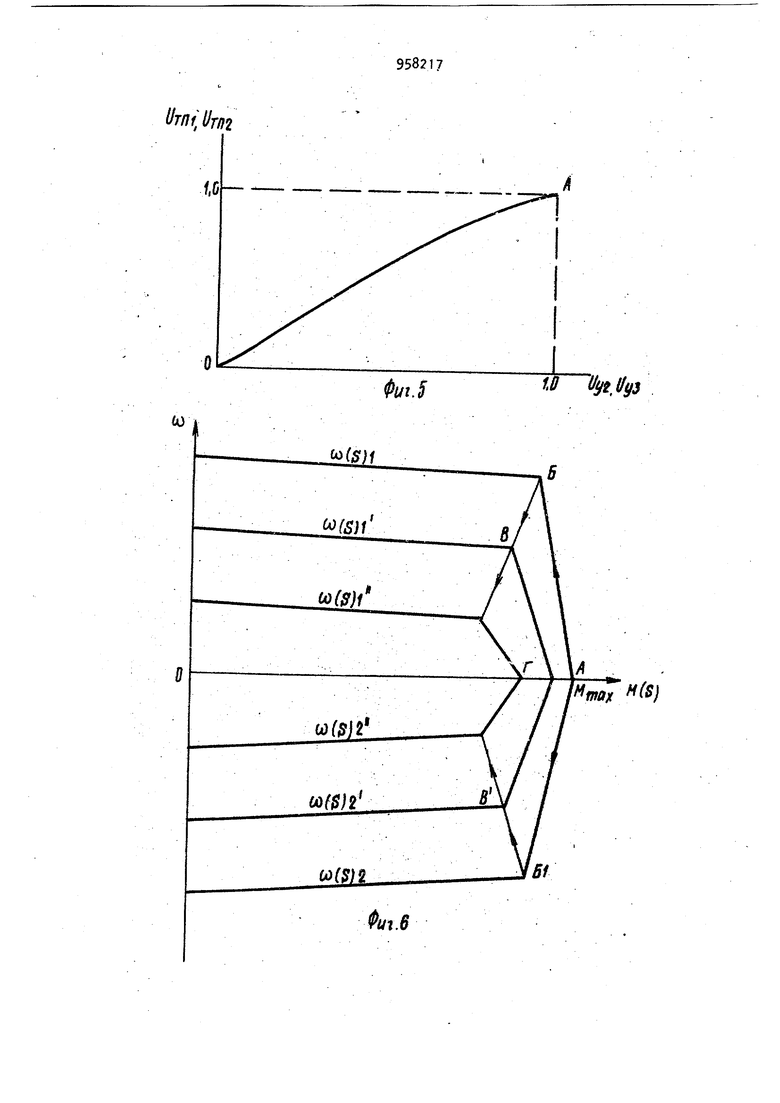
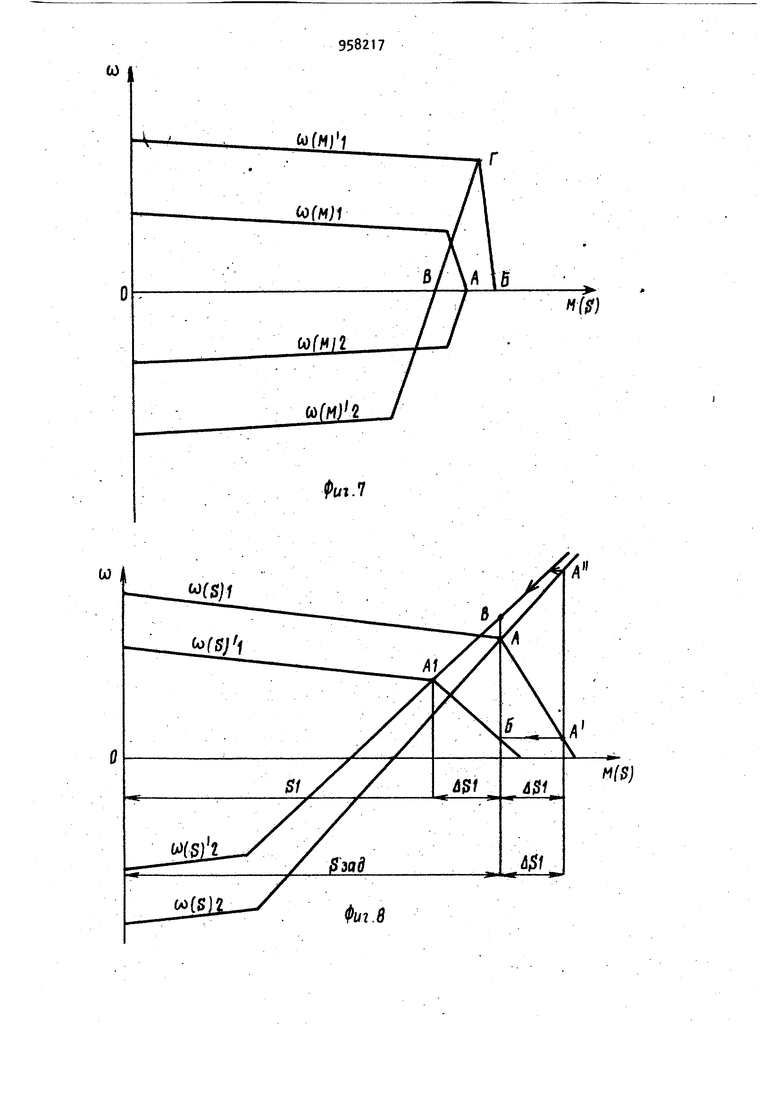
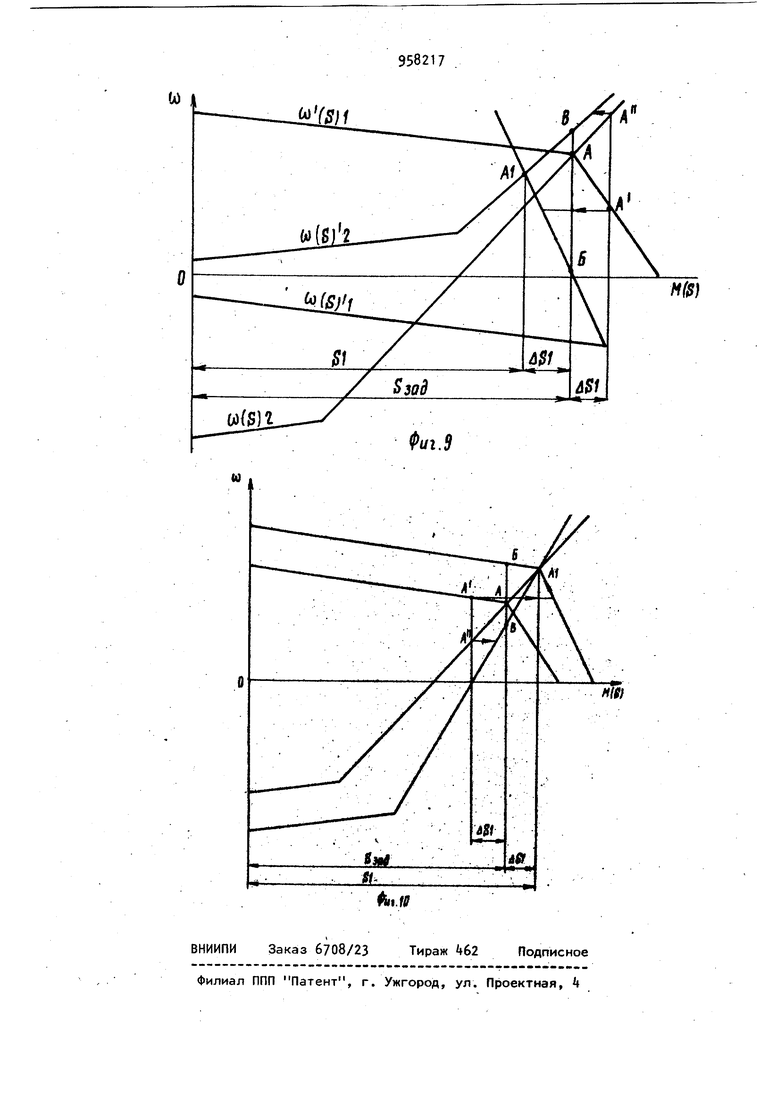
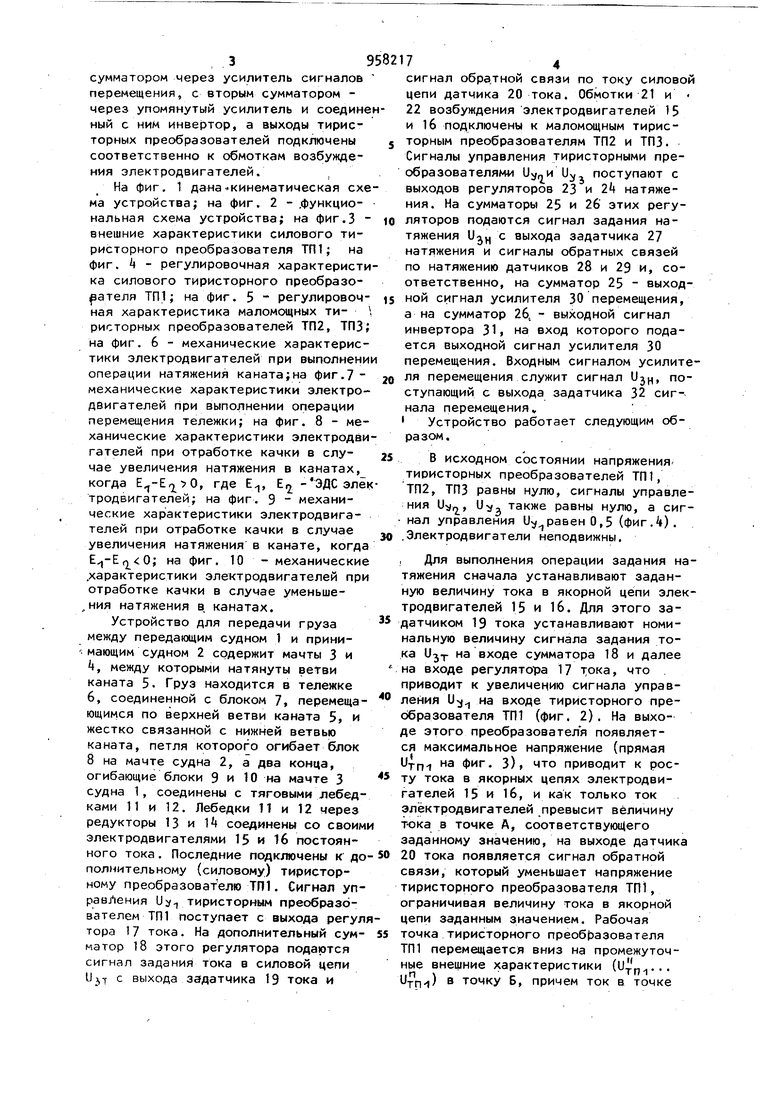
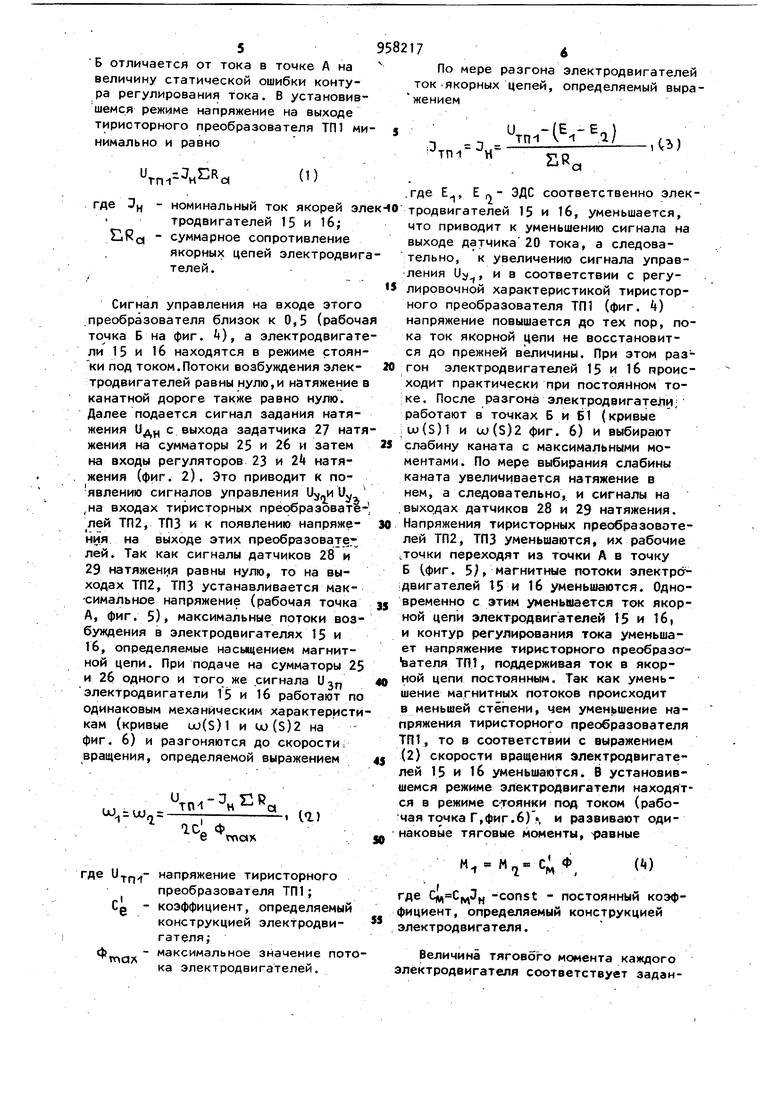
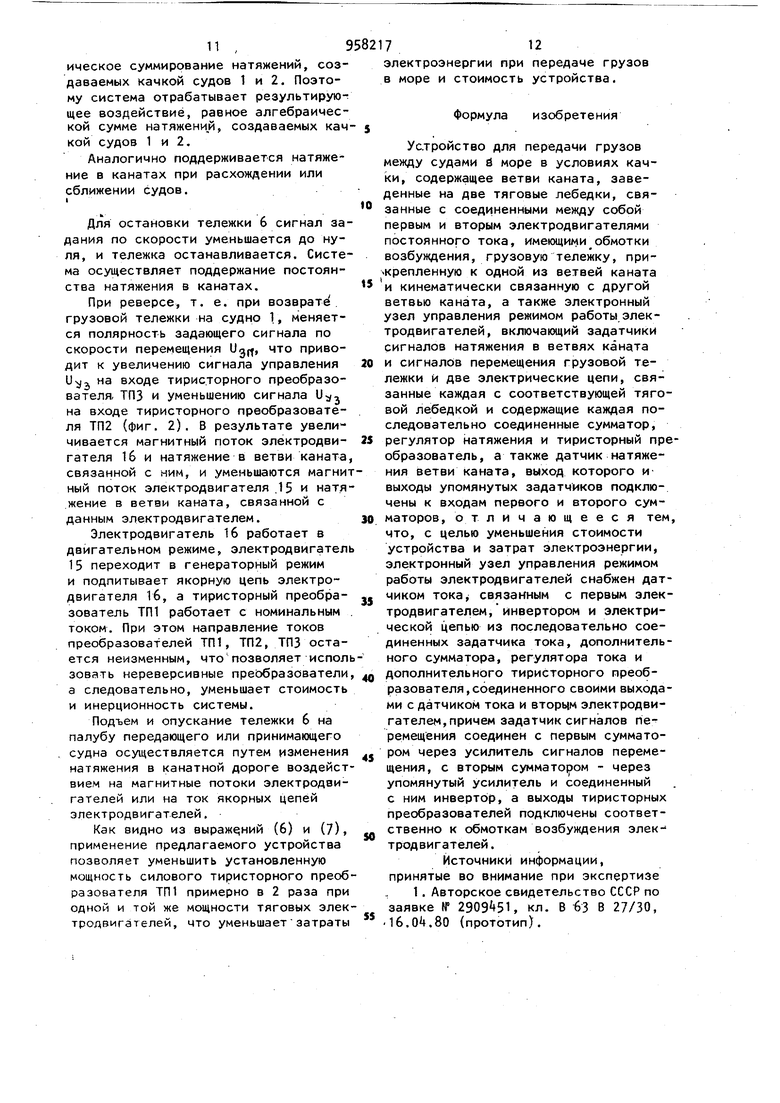
Изобретение относится к судостро ению, в частности к устройствам для передачи грузов между судами в море в условиях качки. Известно устройство для передачи грузов между судами в море в условиях качки, содержащее ветви каната, заведенные на две тяговые лебедки, связанные с соединенными между собой и вторым электродвигателями постоянгого тока, имеющими обмотки возбужде ния, грузовую тележку, прикрепленную к одной- из ветвей каната и кинем тически связанную с другой ветвью ка ната, а также электронный узел управления режимом работы электродви.гателей, включающий задатчики сигналов натяжения в ветвях каната и сигналов перемещения грузовой тележки и две электрические цепи, связанные каждая с соответствующей тяговой лебедкой и содержащие каждая последовательно соединенные сумматор, регулятор натяжения и тиристорный преобразователь, а также датчик натяже ния ветви каната, выход которого и выходы упомянутых задатчиков подключены ко входам первого и второго сумматоров 11. Недостатком известного устройства является значительное потребление им электроэнергии. Цель изобретения - уменьшение стоимости устройства и затрат электроэнергии. Поставленная цель достигается тем, что электронный узел управления режимом работы электродвигателей снабжен датчиком тока, связанным с первым электродвигателем, инвертором и электрической цепью из последовательно соединенных задатчика тока, дополнительного сумматора, регулятора.тока и дополнительного тиристорного преобразователя, соединённого своими выхс дами с датчиком тока и вторым электродвигателем, причем задатчик сигналов перемещения соединен с первым сумматором через усилитель сигналов перемещения, с вторым сумматором через упомянутый усилитель и соедине ный с ним инвертор, а выходы тиристорных преобразователей подключены соответственно к обмоткам возбуждения электродвигателей. На фиг. 1 дана Кинематическая схе ма устройства; на фиг. 2 - .функциональная схема устройства; на фиг.З внешние характеристики силового тиристорного преобразователя ТП1; на фиг. 4 - регулировочная характеристи ка силового тиристорного преобразорателя ТП1; на фиг. 5 регулировочная характеристика маломощных тиристорных преобразователей ТП2, ТПЗ; на фиг. 6 - механические характеристики электродвигателей при выполнени операции натяжения каната;на фиг.7 механические характеристики электродвигателей при выполнении операции перемещения тележки; на фиг. 8 - механические характеристики электродви гателей при отработке качки в случае увеличения натяжения в канатах, где Е, Е, -ЭДС эле , тродвигателей; на фиг. 9 - механические характеристики электродвигателей при отработке качки в случае увеличения натяжения в канате, когда -Е(0; на фиг. 10 - механические .характеристики электродвигателей при отработке качки в случае уменьше,ния натяжения в. канатах. Устройство для передачи груза между передающим судном 1 и принимающим судном 2 содержит мачты 3 и 4, между которыми натянуты ветви каната 5. Груз находится в тележке 6, соединенной с блоком 7, перемещающимся по верхней ветви каната 5, и жестко связанной с нижней ветвью каната, петля которого огибает блок 8 на мачте судна 2, а два конца, огибающие блоки 9 и 10 на мачте 3 судна 1, соединены с тяговыми лебедками 11 и 12. Лебедки 11 и 12 через редукторы 13 и 1 соединены со своим электродвигателями 15 и 1б постоянного тока. Последние подключены к до- 50 полнительному (силовому) тиристорному преобразователю ТП1. Сигнал управления U:/ тиристорным преобразователем ТП1 поступает с выхода регулятора 17 тока. На дополнительный сум- 55 катер 18 этого регулятора подаются сигнал задания тока в силовой цепи Uj-T с выхода задатчика 19 тока и сигнал обрадной связи по току силовой цепи датчика 20 тока. Обмотки 21 и 22 возбуждения электродвигателей 15 и 16 подключены к маломощным тиристорным преобразователям ТП2 и ТПЗ. Сигналы управления тиристорными преобразователями и поступают с выходов регуляторов 23 и 2 натяжения. На сумматоры 25 и 26 этих регуляторов подаются сигнал задания натяжения UjH с выхода задатчика 27 натяжения и сигналы обратных связей по натяжению датчиков 28 и 29 и, соответственно, на сумматор 25 - выходной сигнал усилителя 30 перемещения, а на сумматор 26, - выходной сигнал инвертора 31i на вход которого подается выходной сигнал усилителя 30 перемещения. Входным сигналом усилителя перемещения служит сигнал Uj, поступающий с выхода задатчика 32 сигнала перемещения, Устройство работает следующим образом. в ИСХОДНОМ состоянии напряжениятиристорных преобразователей ТП1, ТП2, ТПЗ равны нулю, сигналы управления Uy,, , также равны нулю, а сигнал управления Uy равен 0,5 (фиг.). .Электродвигатели неподвижны. Для выполнения операции задания натяжения сначала устанавливают заданную величину тока в якорной цепи электродвигателей 15 и 1б. Для этого задатчиком 19 тока устанавливают номинальную величину сигнала задания тока и на входе сумматора 18 и далее на входе регулятора 17 тока, что приводит к увеличению сигнала управления U. на входе тиристорного преббразоаателя ТП1 (фиг. 2), На выходе этого преобразователя появляется максимальное напряжение (прямая и|р-, на фиг. З), что приводит к росту тока в якорных цепях электродвигателей 15 и 1б, и как только ток электродвигателей превысит величину тюка в точке А, соответствующего заданному значению, на выходе датчика 20 тока появляется сигнал обратной связи, который уменьшает напряжение тиристорного преобразователя ТП1, ограничивая величину тока в якорной цепи заданным значением. Рабочая точка тиристорного преоб|зазователя ТП1 перемещается вниз на промежуточные внешние характеристики (u|p... ) в точку Б, причем ток в точке Б отличается от тока в точке А на величину статической ошибки контура регулирования тока. В установившемся режиме напряжение на выходе тиристорного преобразователя ТП1 ми нимально и равно . где Зц номинальный ток якорей эл тродвигателей 15 и 16; cRa суммарное сопротивление якорных цепей электродвиг телей. Сигнал управления на входе этого преобразователя близок к 0,5 (рабоч точка Б на фиг. А), а электродвигат ли 15 и 16 находятся в режиме стоян ки под током.Потоки возбуждения электродвигателей равны нулю,и натяжение канатной дороге также равно нулю. Далее подается сигнал задания натяжения 11д с выхода задатчика 27 нат жения на сумматоры 25 и 26 и затем на входы регуляторов 23 и 2k натяжения (фиг. 2). Это приводит к появлению сигналов управления и,и U ,на входах тиристорных преобразовате лей ТП2, ТПЗ и к появлению напряжения на выходе этих преобразователей. Так как сигналы датчиков 28 и 29 натяжения равны нулю, то на выходах ТП2, ТПЗ устанавливается мак-симальное напряжение (рабочая точка А, фиг. 5), максимальные потоки возбуждения в электродвигателях 15 и 16, определяемые насыщением магнитной цепи. При подаче на сумматоры 25 и 26 одного и того же сигнала U ар электродвигатели 15 и 16 работают по одинаковым механическим характеристи кам (кривые uj(S)1 и «JO (S)2 на фиг. 6) и разгоняются до скорости; вращения, определяемой выражением п.. UJ, UJ .
напряжение тиристорного
преобразователя ТП1; коэффициент, определяемый конструкцией электродвигателя;
максимальное значение потока электродвигателей.
С
W
Ф
м
где Сц(, -const - постоянный коэффициент, определяемый конструкцией электродвигателя.
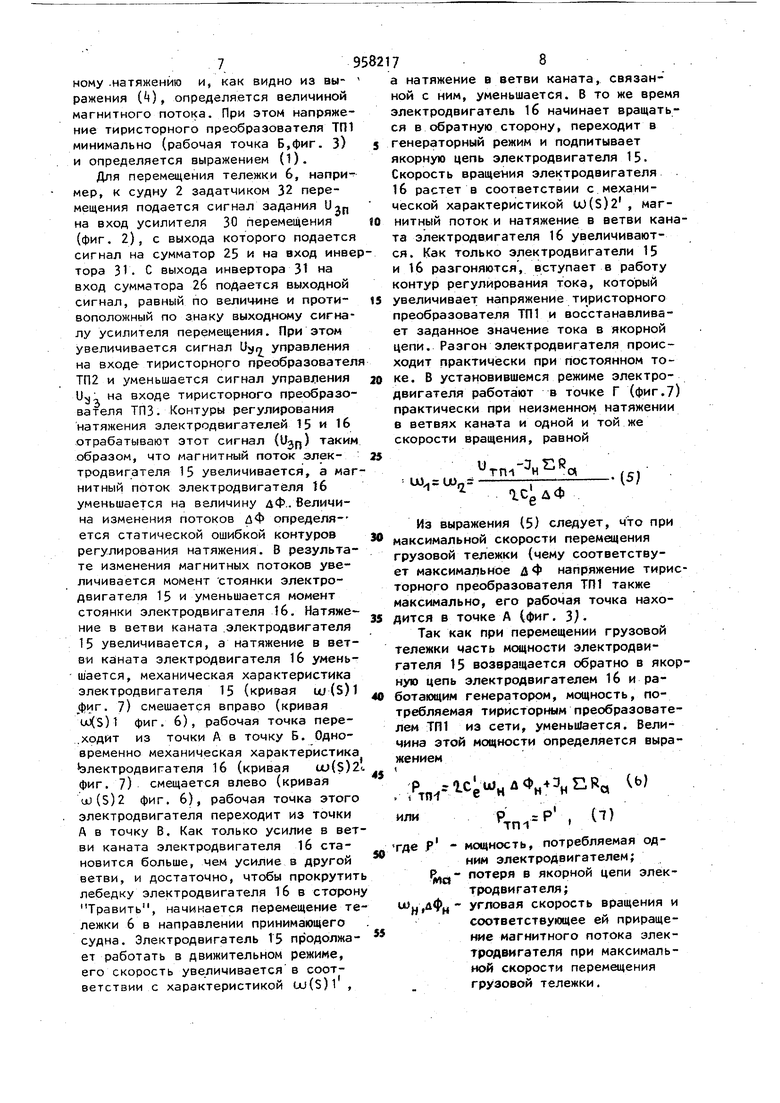
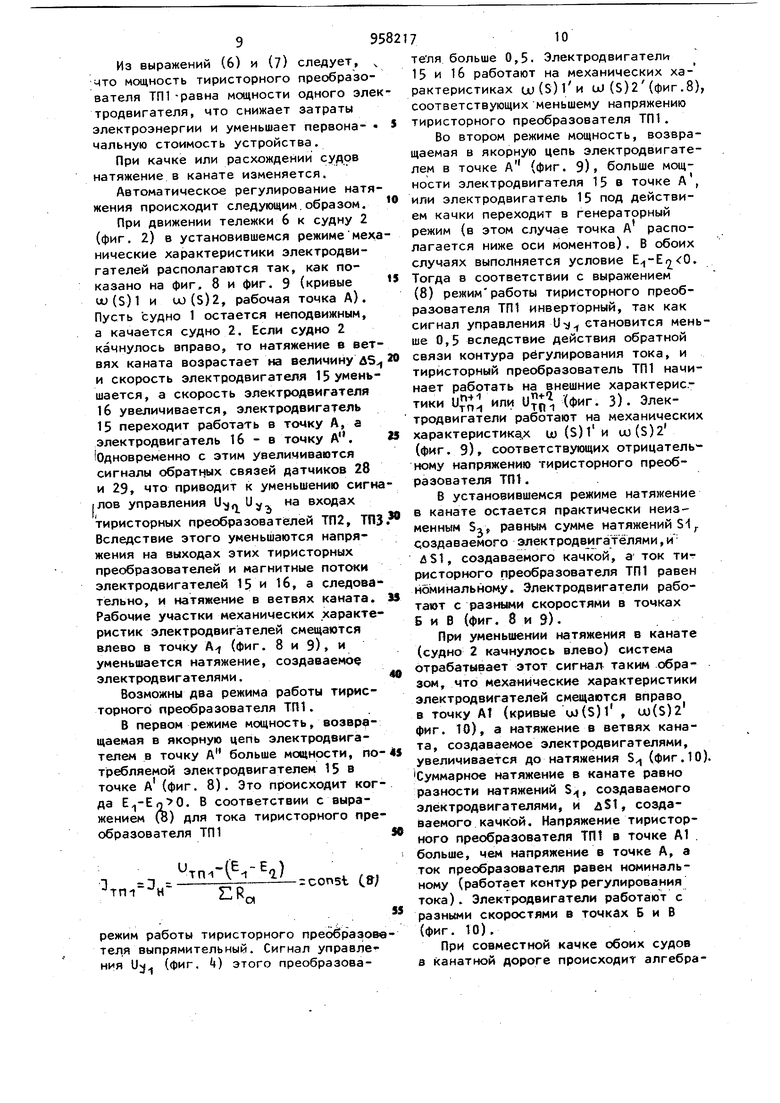
Величина тягового момента каждого Электродвигателя соответствует заданПо мере разгона электродвигателей ток .якорных цепей, определяемый выражением4VS) .где Е, Е rt- ЭДС соответственно электродвигателей 15 и 16, уменьшается, что приводит к уменьшению сигнала на выходе датчика20 тока, а следовательно, к увеличению сигнала управления Uj/, и в соответствии с регулировочной характеристикой тиристорного преобразователя ТП1 (фиг. k) напряжение повышается до тех пор, пока ток якорной цепи не восстановится до прежней величины. При этом разгон электродвигателей 15 и 16 происходит практически при постоянном токе. После разгона электродвигатели; работают в точках Б и Б1 (кривые iu(S)1 и u(S)2 фиг. 6) и выбирают слабину каната с максимальными моментами. По мере выбирания слабины каната увеличивается натяжение в нем, а следовательно, и сигналы на выходах датчиков 28 и 2Э натяжения. Напряжения тирист&рных преобразователей ТП2, ТПЗ уменьшаются, их рабочие .точки переходят из точки А в точку Б (фиг. 5, магнитные потоки электрсгдвигателей t5 и 16 уменьшаются. Одновременно с этим еньшается ток якорной цепи электродвигателей tS и 16, и контур регулирования тока уменьшает напряжение тиристорного преобраза ателя ТП1, поддерживая ток в якорной цепи постоянным. Так как уменьшение магнитных потоков происходит в меньшей степени, чем умен шение напряжения тиристорного преобразователя ТП1, то в соответствии с выражением (2) скорости вращения электродвигателей 15 и 16 уменьшаются. В установившемся режиме электродвигатели находятся в режиме стоянки под током (рабочая точка Г,фиг.6)«, и развивают одинаковые тяговые моменты, равные ному .натяжению и, как видно из выражения (k), определяется величиной магнитного потока. При этом напряжение тиристорного преобразователя ТП1 минимально (рабочая точка Б,фиг. З) и определяется выражением (1). Для перемещения тележки 6, например, к судну 2 задатмиком 32 перемещения подается сигнал задания Ujj, на вход усилителя 30 перемещения (фиг. 2), с выхода которого подается сигнал на сумматор 25 и на вход инве тора 31. С выхода инвертора 3t на вход сумматора 26 подается выходной сигнал, равный по величине и противоположный по знаку выходн(жу сигналу усилителя перемещения. При этом увеличивается сигнал Uyn управления на входе тиристорного преобразовател ТП2 и уменьшается сигнал управления на входе тиристорного преобразователя ТПЗ. Контуры регулирования натяжения электродвигателей 15 и 16 отрабатывают этот сигнал () таким образом, что магнитный поток электродвигателя 15 увеличивается, а маг нитный поток электродвигателя 16 уменьшается на величину дф.. Величина изменения потоков лФ определяется статической ошибкой контуров регулирования натяжения. В результате изменения магнитных потоков увеличивается момент стоянки электродвигателя 15 и уменьшается момент стоянки электродвигателя 16. Натяжение в ветви каната .электродвигателя 15 увеличивается, а натяжение в ветви каната электродвигателя 16 уменьшается, механическая характеристика электродвигателя 15 (кривая ш(5)1 иг. 7) смешается вправо (кривая члХ5)1 фиг. 6), рабочая точка пере.ходит из точки А в точку Б. Одновременно механическая характеристика электродвигателя 16 (кривая io(S)2 фиг. 7) смещается влево (кривая ijj(S)2 фиг. 6), рабочая точка этого электродвигателя переходит из точки А в точку В, Как только усилие в вет ви каната электродвигателя 1б становится больше, чем усилие в другой ветви, и достаточно, чтобы прокрутит лебедку электродвигателя 16 в сторон Травить, начинается перемещение те лежки 6 в направлении принимающего судна. Электродвигатель 15 продолжает работать в движительном режиме, его скорость увеличивается в соответствии с характеристикой Uj(S)1 , а натяжение в ветви каната, связанной с ним, уменьшается. В то же время электродвигатель 16 начинает вращаться в обратную сторону, переходит в генераторный режим и подпитывает якорную цепь электродвигателя 15. Скорость вращения электродвигателя 16 растет в соответствии с механической характеристикой (л)(5)2 , Магнитный поток и натяжение в ветви каната электродвигателя 16 увеличиваются. Как только электродвигатели 15 и 16 разгоняются, вступает в работу контур регулирования тока, который увеличивает напряжение тиристорного преобразователя ТП1 и восстанавливает заданное значение тока в якорной цепи. Разгон электродвигателя происходит практически при постоянном токе. В установившемся режиме электродвигателя работают в точке Г (фиг.7) практически при неизменном натяжении в ветвях каната и одной и той же скорости вращения, равной тп-1- и о U)U)S Из выражения (5) следует, что при максимальной скорости перемещения грузовой тележки (чему соответствует максимальное & Ф напряжение тиристорного преобразователя ТП1 также максимально, его рабочая точка находится в точке А (фиг. 3). Так как при перемещении грузовой тележки часть мощности электродвигателя 15 возвращается обратно в якорную цепь электродвигателем 16 и работающим генератором, мощность, потребляемая тиристорным преобразователем ТП1 из сети, уменьшается. Величина этой мощности определяется выражением . р р де .р - мощность, потребляемая одним электродвигателем; pj- потеря в якорной цепи электродвигателя;Ши,дфц - угловая скорость вращения и соответствующее ей приращение магнитного потока электродвигателя при максимальной скорости перемещения грузовой тележки. Из выражений (6) и (7) следует, что мощность тиристорного преобразо вателя ТП1-равна мощности одного эл тродвигателя, что снижает затраты электроэнергии и уменьшает первоначальную стоимость устройства. При качке или расхождении судов натяжение в канате изменяется. Автоматическое регулирование натя жения происходит следующим,образом. При движении тележки 6 к судну 2 (фиг. 2) в установившемся режимемех нические характеристики электродвигателей располагаются так, как показано на фиг. 8 и фиг. 9 (кривые uj(S)l и uj(S)2, рабочая точка А). Пусть судно 1 остается неподвижным, а качается судно 2. Если судно 2 качнулось вправо, то натяжение в вет вях каната возрастает на величину Л5 и скорость электродвигателя 15 умень шается, а скорость электродвигателя 16 увеличивается, электродвигатель 15 переходит работать в точку А, а электродвигатель 16 - в точку А. (Одновременно с этим увеличиваются сигналы обратных связей датчиков 28 и 29, что приводит к уменьшению сигн Лов управления Uy на входах тиристорных преобразователей ТП2, ТП Вследствие этого уменьшаются напряжения на выходах этих тиристорных преобразователей и магнитные потоки электродвигателей 15 и 16, а следова тельно, и натяжение в ветвях каната. Рабочие участки механических характе ристик электродвигателей смещаются влево в точку A-j (фиг. 8 и 9), и уменьшается натяжение, создаваемое электродвигателями. Возможны два режима работы тиристорного преобразователя ТП1. В первом режиме мощность, возвращаемая в якорную цепь электродвигателем в точку А больше мощности, по требляемой электродвигателем 15 в точке А (фиг. 8). Это происходит ког да Е -ЕпО. В соответствии с выражением (о) для тока тиристорного пре образователя ТП1 ,...3,., ТП1 Н режим работы тиристориого преовразове теля выпрямительный. Сигнал управления (фиг. ) этого преобразователя больше 0,5. Электродвигател 15 и 16 работают на механических характеристиках и)(5)1и Ы (S)2(фиг.8), соответствующих меньшему напряжению тиристорного преобразователя ТП1. Во втором режиме мощность, возвращаемая в якорную цепь электродвигателем в точке А (фиг. 9) больше мощности электродвигателя 15 в точке А , или электродвигатель 15 под действием качки переходит в генераторный режим (в этом случае точка А располагается ниже оси моментов). В обоих случаях выполняется условие . Тогда в соответствии с выражением (8) режимработы тиристорного преобразователя ТП1 инверторный, так как сигнал управления U-j становится меньше 0,5 вследствие действия обратной связи контура регулирования тока, и тиристорный преобразователь ТП1 начинает работать на внешние характерис,тики или UTJ,, (фиг. 3). Электродвигатели работают на механических характеристика.х U) (S)l и uj(S)2 (фиг. 9), соответствующих отрицательному напряжению тиристорного преобразователя ТП1. . В установившемся режиме натяжение в канате остается практически неизменным So, равным сумме натяжений SI создаваемого электродвигателями, иЛ51, создаваемого качкой, а ток ти ристорного преобразователя ТП1 равен номинальному. Электродвигатели работают с разными скоростями в точках Б и В (фиг. 8 и 9). При уменьшении натяжения в канате (судно 2 качнулось влево) система отрабатывает этот сигнап таким образом, что механические характеристики электродвигателей смещаются вправо в точку At (кривые ы(5)1 , u)(S)2 фиг. 10), а натяжение а ветвях каната, создаваемое электродвигателями, увеличивается до натяжения S (фиг. 10). Суммарное натяжение в канате равно разности натяжений S, создаваемого электродвигателями, и л51, создаваемого качкой. Напряжение тиристорного преобразователя ТП1 в точке А1 . больше, чем напряжение в точке А, а ток преобразователя равен номинальному (работает контур регулирования тока). Электродвигатели работают с разными скоростями в точках Б и В (фиг. 10). При совместной качке обоих судов в канатной дороге происходит алгебраическое суммирование натяжении, создаваемых качкой судов 1 и 2. Поэтому система отрабатывает результирующее воздействие, равное алгебраической сумме натяжени,й, создаваемых кач кой судов 1 и 2. Аналогично поддерживается натяжение в канатах при расхождении или сближении судов. Для остановки тележки 6 сигнал за дания по скорости уменьшается до нуля, и тележка останавливается. Систе ма осуществляет поддержание постоянства натяжения в канатах. При реверсе, т. е. при возврат грузовой тележки на судно 1, меняется полярность задающего сигнала по скорости перемещения Ugrff что приводит к увеличению сигнала управления на входе тиристорного преобразователя ТПЗ и уменьшению сигнала Uy, на входе тиристорного преобразователя ТП2 (фиг. 2). В результате увеличивается магнитный поток электродвигателя 16 и натяжение в ветви каната связанной с ним, и уменьшаются магни ный поток электродвигателя .15 и натя .жение в ветви каната, связанной с данным электродвигателем. Электродвигатель 16 работает в двигательном режиме, электродвигател 15 переходит в генераторный режим и подпитывает якорную цепь электродвигателя 16, а тиристорный преобразователь ТП1 работает с номинальным током. При этом направление токов преобразователей ТП1, ТП2, ТПЗ остается неизменным, что позволяет испол зовать нереверсивные преобразователи,
а следовательно, уменьшает стоимость и инерционность системы.
Подъем и опускание тележки 6 на палубу передающего или принимающего судна осуществляется путем изменения натяжения в канатной дороге воздействием на магнитные потоки электродвигателей или на ток якорных цепей электродвигателей.
Как видно из выражений (6) и (7), применение предлагаемого устройства позволяет уменьшить установленную мощность силового тиристорного преобразователя ТП1 примерно в 2 раза при одной и той же мощности тяговых электродвигателей, что уменьшаетзатраты
разователя,соединенного своими выходами с датчиком тока и вторым электродвигателем, причем задатчик сигналов Перемещения соединен с первым сумматором через усилитель сигналов перемещения, с вторым сумматором - через упомянутый усилитель и соединенный с ним инвертор, а выходы тиристорных прес разователей подключены соответственно к обмоткам возбуждения электродвигателей.
Источники информации,
принятые во внимание при экспертизе
. 1. Авторское свидетельство СССР по
заявке № 2909 51, кл, В 63 В 27/30,
. Тб.О+.вО (прототип). 712 электроэнергии при передаче грузов в море и стоимость устройства. Формула изобретения Устройство для передачи грузов между судами и море в условиях качки, содержащее ветви каната, заведенные на две тяговые лебедки, связанные с соединенными между собой первым и вторым электродвигателями постоянного тока, имеющими обмотки возбуждения, грузовую тележку, при«крепленную к одной из ветвей каната и кинематически связанную с другой ветвью каната, а также электронный узел управления режимом работы.электродвигателей, включающий задатчики сигналов натяжения в ветвях каната и сигналов перемещения грузовой тележки и две электрические цепи, связанные каждая с соответствующей тяговой лебедкой и содержащие каждая последовательно соединенные сумматор, регулятор натяжения и тиристорный преобразователь, а также датчик натяжения ветви каната, выход которого и выходы упомянутых задатчиков подключены к входам первого и второго сумматоров, отличающееся тем, что, с целью уменьшения стоимости устройства и затрат электроэнергии, электронный узел управления режимом работы электродвигателей снабжен датчиком тока связанным с первым электродвигателем, инвертором и электрической цепью из последовательно соединенных задатчика тока, дополнительного сумматора, регулятора тока и дополнительного тиристорного преобUy
