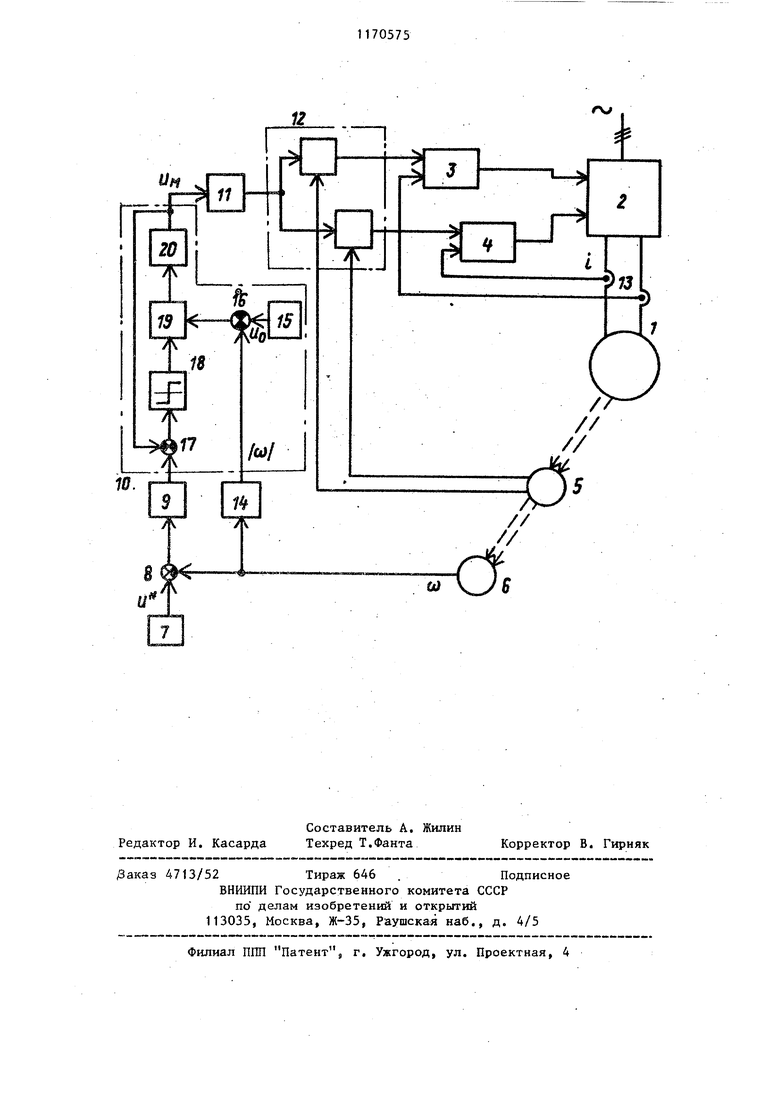
Изобретение относится к электро-. технике, а именно к частотно-управляемым электроприводам, построенным на основе синхронных двигателей, и может быть использовано в различны областях промьшшенности для регулирования скорости и положения нагрузки при высоких требованиях к точности и качеству регулирования. Цель изобретения - повышение точности управления скоростью вращения синхронного двигателя. На чертеже представлена функциональная схема электродвигателя с синхронным двигателем. Электропривод содержит синхронный двигатель 1 (на чертеже представ ленный в двухфазном исполнении), усилитель 2 мощности, выходы которог подключены к статорным обмоткам синхронного двигателя 1, а управляющие входы - к выходам регуляторов 3 и 4 фазных токов, датчик 5 углового поло жения и датчик 6 скорости, установленные на валу синхронного двигателя 1 , последовательно соединенные блок 7 задания, первый элемент 8 сравнения, .регулятор 9 скорости, формирователь 10 управляющего сигнала, элемент 11 токоограничителя и блок 12 преобразования координат, вы ходы которого подключены к управляющим входам регуляторов 3 и 4 фазных токов, а опорные входы - к выходам датчика 5 углового положения датчики 13 фазных токов статора, под ключенные выходами к входам обратных связей соответствукицих регуляторов 3 и 4 фазных токов, и выпрямитель 14, вход которого объединен с другим входом первого элемента 8 сравнения и подключен к выходу датчика 6 скорости, при этом выход выпрямите ля 14 соединен с другим входом форми рователя 10 управляющего сигнала. Формирователь 10 управляющего сиг нала составлен из источника 15 постоянного напряжения, второго элемента 16 сравнения и последовательно соединенных третьего элемента 17 сравнения, ограничителя 18 напряжения с релейной характеристикой, множителя 19 и интегратора 20, выход которого образует выход формирователя 10.управляющего сигнала 10 и подключен к одному из входов третьего элемента 17 сравнения, другой вход которого образует первый вход форми1 . 752 рователя 10 управляющего сигнала, при этом выход второго элемента 16 сравнения подключен к другому входу множителя 19, один из входов второго элемента 16 сравнения, подключен к выходу источника 15 постоян-ного напряжения, а другой его вход образует второй вход формирователя 10 управляющего сигнала. Электропривод работает следующим образом. Питание статорных обмоток синхронного двигателя 1 осуществляется от усилителя 2 мощнвсти, управляю- щи§ сигналы для которого формируются- с помощью регуляторов 3 и 4 фазньк токов по результатам сравнения сигналов задания фазных токов, поступающих с выходов блока 12 преобразования координат, и сигналов, соответствукщих действительным фазным токам, поступающим с .выходов датчиков 13 фазных токов. На управлякщий вход блока 12 преобразования координат поступает сигнал, получаемьй с помощью регулятора 9 скорости, формирователя 10 управляющего сигнала и элемента 11 токоограничения по результатам сравнения на элементе 8 сравнения сигнала и задания скорости вращения, поступающего с выхода блока 7 задания, и сигнала действительной скорости вращения tAJ , поступающего с выхода датчика 6 скорости. Указанньй сигнал преобразуется в блоке 12 преобразования координат в сигналы задания фазных токов с помощью опорных функций, поступающих с выходов датчика 5 углового положения. Регуляторы 3 и 4 фазных токов выполнены с релейными характеристиками и обеспечивают отработку заданных фазных токов в достаточно широком диапазоне частот. Однако при ограничениях, накладываемых усилителем 2 мощности (при малых запасах по напряжению), а также в тех случаях, когда ЭДС вращения синхронного двигателя 1 сравнима с величиной напряжения в звене постоянного тока усилителя 2 мощности, резкие изменения заданий на контуры фазных токов (например, от внешних возмущений) приводят к появлению ошибок в токовьк контурах и нарушению симметрии системы токов в статорных обмотках. При этом нарушается стро3
roe соответствие между электромагнитным моментом на валу синхронног двигателя и его заданием Ь на выходе формирователя 10 управляющего сигнала возникают динамические ошибки и снижается точность системы.
Для устранения указанного недостатка необходимо, чтобы скорость изменения сигнала задания фазного тока (или скорость изменения сигнала Ujy.) не превышала максимально возможной скорости изменения тока i в статорной обмотке синхронного двигателя 1, т.е. для любой из фаз должно вьтолняться неравенство
di dt
dUM
dt
Вьтолнение указанного неравенства реализуется в электроприводе с помощью формирователя 10 управляющего сигнала.
На выходе элемента 17 сравнения получают разность между выходным сигналом регулятора 9 скорости и выходным сигналом и формирователя 10 управлякацего сигнала, определяющего электромагнитньй момент синхронного двигателя 1.
На выходе ограничителя 18 напряжения с релейной характеристикой получают постоянное напряжение с нормированной амплитудой, которое интегрируют с помощью интегратора 20, .образуя сигнал U(.
Формирователь Ю управляющего сигнала по представленной схеме, ограничивая скорость изменения сигнала U, не вносит фазового сдвига в контуры управления фазным токами в широком диапазоне частот, что обеспечивает высокую точность управления скоростью вращения синхронного двигателя 1.
705754
В электроприводе осуществляется дополнительная корректировка скорости нарастания сигнала Од. в функции скорости вращения tO . Для этого 5 введен выпрямитель 14, на выходе которого получают сигнал /uJ/, соответствующий модулю скорости.
С помощью элемента 16 сравнения производится сравнение полученного
JO сигнала /о / с уставкой U , поступающей с выхода источника 15 постоянного напряжения. По результатам сравнения указанных сигналов с помощью множителя 19, установленного
15 на входе интегратора 20, производится изменение скорости нарастания сигнала U с учетом действия противо-ЭДС (скорости вращения) синхронного двигателя. При этом обеспечивается согласование скоростей нарастания сигналов заданий и действительных фазных токов синхронного двигателя в широком диапазоне частот, а следовательно, и высокая точность
25 управления скоростью вращения.
Таким образом, введение в формирователь управляющего сигнала электропривода двух элементов сравнения, источника постоянного напряжения,
30 ограничителя напряжения, множителя и интегратора позволяет решить задачу согласования скоростей нарастаний сигналов заданий и действительных фазных токов синхронного дригателя
j, в широком диапазоне частот, без вне-: сения фазовых искажений в контуры формирования .фазных токов.
Благодаря этому устраняются погрешности формирования токов, питающих статорные обмотки синхронного двигателя от ограниченного по мощности усилителя, и повышается точность управления моментом и скоростью вращения.
12
i
1--- - - l
20
/
13
10.
r
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1983 |
|
SU1167688A1 |
| Электропривод | 1983 |
|
SU1112520A1 |
| Вентильный электропривод | 1983 |
|
SU1234940A1 |
| Электропривод | 1985 |
|
SU1277344A1 |
| Электропривод | 1987 |
|
SU1439729A1 |
| Электропривод переменного тока | 1986 |
|
SU1332506A1 |
| Электропривод переменного тока | 1984 |
|
SU1264292A1 |
| Многодвигательный электропривод | 1990 |
|
SU1734185A1 |
| Электропривод переменного тока | 1985 |
|
SU1264294A1 |
| Электропривод переменного тока | 1986 |
|
SU1427541A1 |
ЭЛЕКТРОПРИВОД,содержащий синхронный двигатель, усилитель мощности, выходы которого подключены к статорным обмоткам синхронного двигателя, а управляющие входы - к выходам регуляторов фазных токов, датчики углового положения и скорости, установленные на валу синхронного дви гателя, последовательно соединенные блок задания, первый элемент сравнения, регулятор скорости, формирователь управляющего сигнала, элемент токоограничения и блок преобразования координат, выходы которого подключены к управлянядим входам регуляторбв фазных токов, а опорные входы к выходам дагчи1ка углового положения, датчики фа;зных токов статора. подключенные выходами к входам обратмьЕХ связей соответствугодих регуляторов фазных токов, и вьтрямитель, вход которого объединен с други входом первого элемента сравнения и подключен к выходу датчика скорости, при этом выход выпрямителя соединен с другим входом формирователя управляющего сигнала, о т л и чающийсй тем, что, с целью повышения точности управления скоростью вращения, формировач ель управляквдего сигнала состоит из источника постоянного напряжения, второго элемента сравнения и последовательно соединенных третьего (Л элемента сравнения, ограничителя напряжения с релейной характеристикой, множителя и интегратора, выход которого образует выход формиро вателя управляющего сигнала и подключен к одному иэ входов третьего элемента сравнения, другой вход которого образует первый вход формирователя управляющего сигнала, при этом выход второго элемента ел сравнения подключен к другому входу « множителя, один из входов второго 01 элемента сравнения подключен к выходу источника постоянного напряжения, а другой вход образует второй вход формирователя управляющего сиг нала .
| Бродовский В.Н., Иванов E.G | |||
| Приводы с частотно-токовым управлением | |||
| М., Энергия, 1974, с.31, Авторское свидетельство СССР № 1112520, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
