Изобретение относится к машино- cTpoeHHid, в частности к пневматическим шаговым приводам линейного перемещения, и может найти применение для управления движением рабочих органов технологических машин, в том числе автоматических манипуляторов, прессов, металлорежущих станков и т.д
Цель изобретения - упрощение конструкции привода.
На чертеже представлена принципиальная схема предлагаемого привода
Шаговый привод содержит источник 1 питания, цилиндр 2, установленный в нем с образованием рабочих полос-: тей 3 и 4 поршень 5 со штоком 6. На наружной поверхности поршня 5 и внутренней поверхности цилиндра 2 выполнены кольцевые нарезки 7 и 8. Рабочая полость 3 подключена к источнику 1 питания и атмосфере через управляемый двухпозиционный трехлинейньй пневмораспределитель 9, дроссель 10 с обратным клапаном 11. Командоаппа- рат включает датчик 12 давления и счетчик 13 импульсов. Кроме того, привод содержит фиксирующее устройство, содержащее фрикционньй элемент, выполненный в виде колец 14 с звез- дочкообразным сечением, установленных с возможностью взаимодействия с винтовой нарезкой 8 цилиндра.
Привод работает следующим образом
От источника 1 питания сжатый воздух через пневмораспределитель 9, дроссель 10 поступает в рабочую полость 3, а полость 4 сообщена с атмосферой. Под воздействием перепада давлений s рабочих полостях 3 и 4 поршень 5 со штоком 6 перемещается вправо по чертежу. Кольца 14, взаимодействуя с кольцевыми нарезками 7 и 8, осуществляют движение .относиг тельно указанных нарезок 7 и 8 без проскальзьшания в направлении продольной оси поршня 5. В процессе такого движения колец 14 происходит вращение их меридиальных сечений против направления вращения часовой стрелки с одновременным поступательным движением относительно поршня 5 влево по чертежу, а также происходит периодическая упругая деформация материала колец .14 без изменения их формы. За каждый полный оборот мери- диальньк сечений колец 14 происходит один цикл накопления и вьщеления упругой потенциальной энергии колец 14
0
ЧТО сопровождается действием на поршень 5 со стороны каждого кольца 14 осевой знакопеременной периодической силы. В первую половину периода изменения указанная осевая сила направлена против движения поршня 5 и осуществляет торможение последнего, а во вторую половину периода направлена в. сторону движения 5 поршня и ускоряет его. В результате чередования замедленного и ускоренного движений поршня 5 происходит соответствующее увеличение и уменьшение дав5 ления воздуха в рабочей полости 3, сообщенной с датчиком 12 давления. Количество двойных ходов поршня 5. со штоком 6 датчика 12 давления и соответствующее ему количество периодов упругой деформации каждого кольца 14 подсчитьшается счетчиком 13 импульсов. При регистрировании счетчиком 13 определенного заранее установленного (запрограммированного) на нем количества импульсов от него поступает электрический сигнал управления на пневмораспределитель 9, при переключении которого рабочая полость 3 сообщается с атмосферой.
0 Поршень 5, испытывая лишь действие в осевом .направлении упругих сил со стороны колец 14, продолжает движение до тех пор, пока запас потенциальной энергии упругих сил всех колец 14 станет минимальным, Тое. меридиаль- ные сечения каждого кольца 14 окажутся повернутыми на целое число оборотов по сравнению с исходным ненапряженным положением. Поршень 5 перемещается на один шаг зА время одного полного оборота меридиально- го сечения каждого кольца 14.
5
5
0
Таким образом, обеспечиваются перемещения поршня 5 со штоком 6 на запрограммированное количество шагов, соответствующее количеству импульсов падения давления в рабочей полости 3, и последующая фиксированная остановка. Причем точность фиксированной остановки поршня 5 тем вьш1е, чем меньше силы внешнего сопротивления, приложенные к штоку 6,- по сравнению с упругими осевыми силами колец 14.
В процессе работы обеспечивается герметизация сопрягаемых поверхностей колец 14, цилиндра 2 и поршня 5 за счет эластичных свойств колец 14.
Возврат поршня 5 со штоком 6 в исходное положение производится при подаче сжатого воздуха в рабочую полость 4. Затем цикл повторяется, для этого прекращают (отключают) подачу электрического сигнала от счетчика 13 импульсов к пневмораспределителю 9, и последний приходит в исходное положение (состояние).
Эффективность предлагаемого пневмопривода достигается за счет упрощения конструкции (конструктивно сложные элементы прототипа - устройства фиксации поршня в продольном и круговом направлениях - исключены, а их функции возложены на уплотнительные элементы, а именно торообразные эластичные уплотнительные кольца).
Ф. ормула изобретения
Шаговый привод, содержащий источник питания, командоаппарат, цилиндр
Редактор М.Дыпын
Составитель В.Коваль
Техред Л.Сердюкова Корректор В.Бутяга
Заказ 3941/32 Тираж 639 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
,
333879
установленный в нем с образованием рабочих полостей поршень со штоком, фиксирующее устройство, выполненное в виде фрикционного элемента, размещенного с возможностью взаимодействия с цилиндром и поршнем, при этом рабочие полости подключены через управляемый пневмораспределитель к Q источнику питания в атмосфере, о тличающийся тем, что, с целью упрощения конструкции, внутренняя поверхность цилиндра и наружная поверхность поршня выполнены с кольцевыми
15 нареэками, а фрикционный элемент выполнен в виде колец с звездочкообраз- ным сечением, установленных с возможностью взаимодействия, с кольцевыми нарезками цилиндра и поршня, при
2Q этом командоаппарат выполнен в виде счетчика импульсов и датчика давле- . ния, подключенного к одной из рабочих полостей. 

| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления пневматическим молотом с закрепленным на станине ресивером | 1983 |
|
SU1076175A1 |
| Система включения преимущественно для кривошипных прессов | 1981 |
|
SU1085329A1 |
| Устройство для перемещения заготовок с позиции вырубки на следующую позицию штампа | 1989 |
|
SU1696065A1 |
| Устройство для перемещения вырубленных заготовок в многопозиционном прессе | 1989 |
|
SU1712037A1 |
| ПНЕВМОНАСОС | 1998 |
|
RU2143587C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПО НАРУЖНОЙ ПОВЕРХНОСТИ ТРУБОПРОВОДА | 1992 |
|
RU2061612C1 |
| Бесштоковый позиционный магнитопневматический привод | 1990 |
|
SU1732010A1 |
| Устройство для управления пневматическим уравновешивающим стреловым подъемником | 1984 |
|
SU1328279A1 |
| БЕСШТОКОВЫЙ ПРИВОД | 1991 |
|
RU2054133C1 |
| Позиционный пневматический привод | 2018 |
|
RU2689662C1 |
Изобретение м.б. использовано для управления движением рабочих органов автоматических манипуляторов, прессов и металлорежупщх станков. Цель изобретения - упрощение конст F)i рукции привода, Внутреняя поверхность (П) цилиндра 2 и наружная П поршня 5 вьтолнены с кольцевыми нарезками 7 и 8, взаимодействующими с дочкообразными кольцами 14 фрикционного злемента, К одной из рабочих полостей цилиндра подключены счетчик 13 импульсов и датчик 12 давления. Привод обеспечивает перемещение поршня 5 на запрограммированное количество шагов, соответствующее количеству импульсов падения давления в рабочей полости, и фиксированную остановку. Герметизация сопрягаемых П колец 14, цилиндра 2 и поршня 5 обеспечивается за счет зластичных свойств колец, вьшолняющих одновременно функции фиксатора. 1 ил. СО с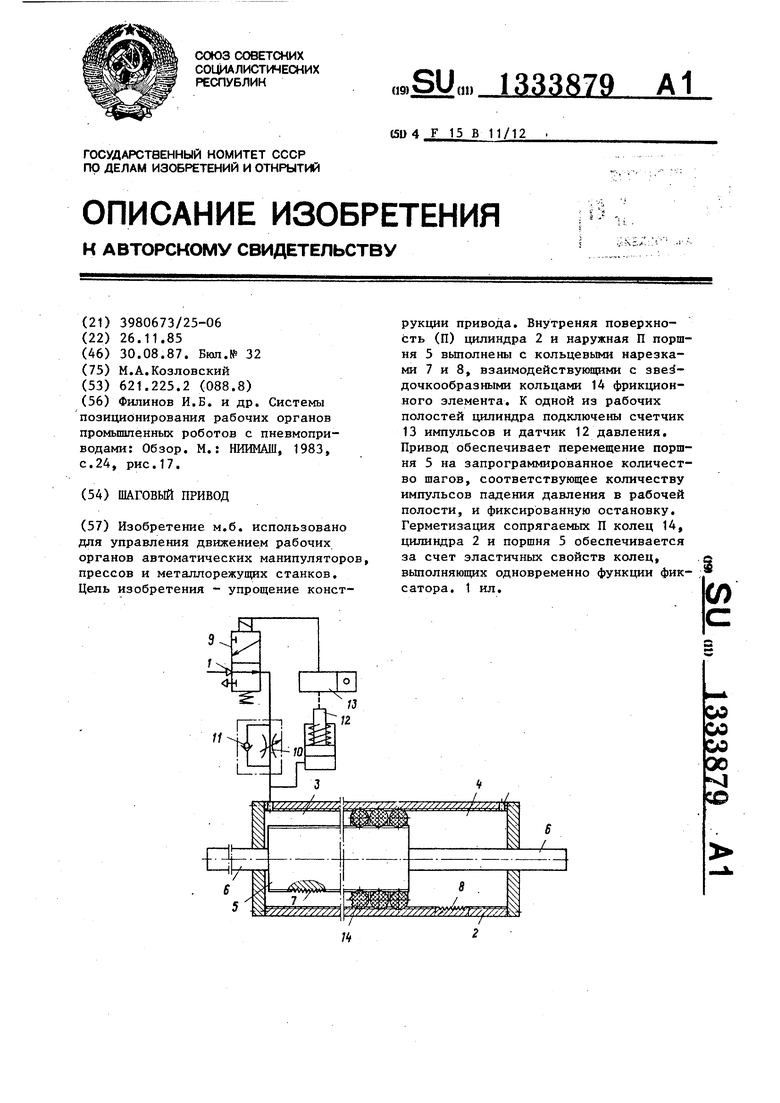
| Филинов И.Б | |||
| и др | |||
| Системы позиционирования рабочих органов промьпйпенных роботов с пневмоприводами: Обзор | |||
| М.: НИИМАШ, 1983, с.24, рис.17. |
