1
Изобретение относится к автомати- ке и может быть использовано при управлении роботами-манипуляторами,
Цель изобретения - повышение
,- -.
быстродействия и точности, уменьшение колебательности системы.
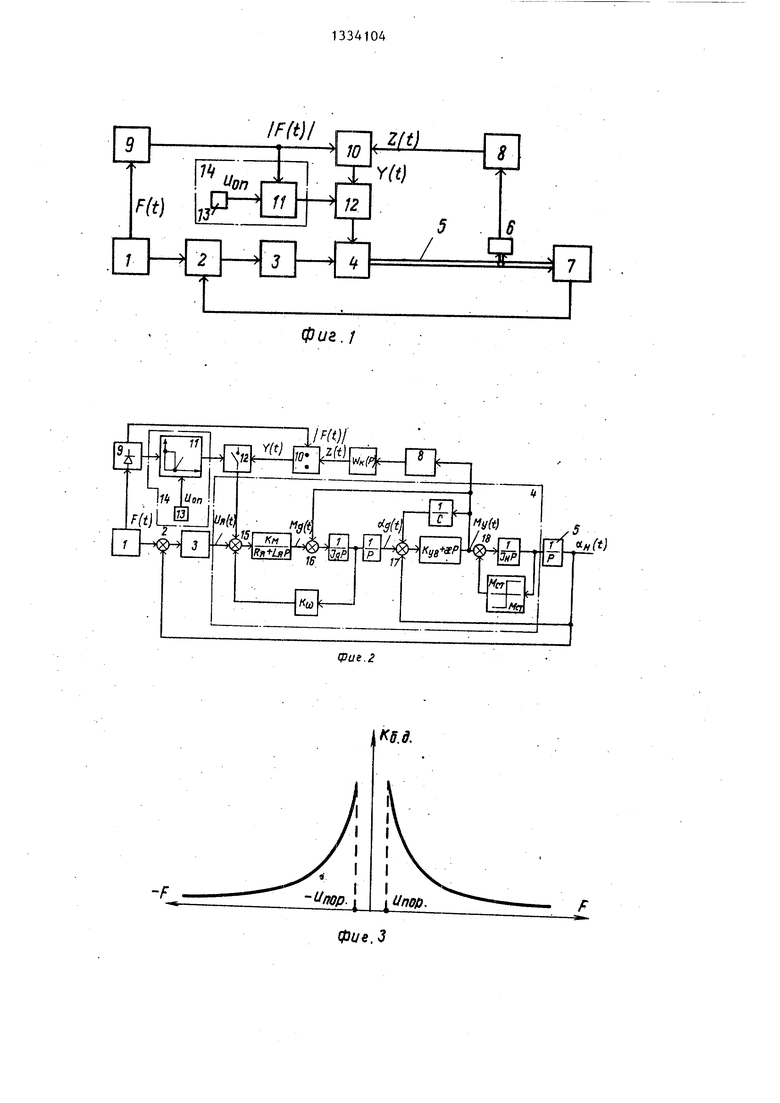
На фиг. 1 приведена функциональная схема системыj на фиг. 2 - структурная схема системы; на фиг. 3 -ил- люстрация работы блока деления, детектора, блока управления и блока обратной Ьвязи; на фиг. 4 и 5 - графики переходных процессов на валу электропривода и валу объекта регули рования без коррекции и с коррекцией по упругому моменту.
Система содержит задатчик 1, из- меритель 2 рассогласования, предварительный усилитель 3, электропри- вод 4, силовой вал 5, моментный датчик 6, объект 7 регулирования, усилитель 8, детектор 9, блок 10 деления, элемент 11 сравнения, блок 12 обратной связи, источник 13 опорного напряжения, блок 14 управления, сумматоры 15-18.
Кроме того на фиг. 1-5 приняты обозначения: W., (р) и Wo,,,,, (р) - передаточные функции предварительного
-И.
ное напряжение; R
усилителя 2 и усилителя 8; и - опоря
1, J, - активное и
Кцз - коиндуктивное сопротивление обмотки якоря электропривода 4, К,
Л
эффициент момента и противо-ЭДС электропривода 4, Jq, Jjj - моменты инерции электропривода 4 и объекта регулирования 7j момент сопротивления движению вала объекта регулирования 7; С и KUO, коэффициенты упругости моментного датчика и силового вала J2 - коэффициент потерь на деформацию; W(p) - передаточная функция корректирующего звена; F(t) сигнал на втором выходе задатчика 1, F(t) - сигнал на выходе детектора 9; Z(t), Y(t) - сигналы на входе Делимое и на выходе блока делителя 10; и (t) - выходной сигнал предварительного усилителя 3; oCa(t), ci(t) - углы поворота вала электропривода 4 и вала объекта регулирования 7;, MnCt), My(t) - моменты на валах электропривода 4 и объекта регулирования 7; р - оператор Лапласа, t - время; Kga - коэффициент передачи блока 10 деления.
В состав блока 14 управления входят источник 13 опорного напряжения
g
o
5
0
5
0
5
0
55
042
и элемент 11 сравнения, например, компаратор. В качестве управляемого блока обратной связи может быть использован, например, аналоговый ключ. Силовой вал 5 может представлять собой, например, гибкий силовой прово- лочньш вал. В качестве детектора 9 может быть использован, например, двухтактный детектор.
Система работает следующим образом.
С первого выхода задатчика 1 управляющего воздействия сигнал F(t), пропорциональный требуемому положению объекта регулирования 7, поступает на первый вход измерителя рассогласования. На второй вход измерителя 2 рассогласования поступает сигнал, соответствующий текущему положению объекта 7 регулирования. Измер 1тель 2 рассогласования вырабатывает управляющее напряжение, которое усиливается предварительным усилителем 3 и поступает на первый вход электропривода 4. Электропривод 4 через силовой вал 5 приводит в действие объект 7 регулирования. С второго выхода задатчика 1 управляющего воздействия сигнал F(t) поступает на вход детектора 9. С выхода детектора 9 сигнал приходит на вход делителя блока 10 деления и на первый вход элемента 11 сравнения, на второй вход которого подается некоторое опорное напряжение И с выхода источника 13 опорного напряжения. На первый вход Делимое блока 10 деления поступает сигнал с выхода моментного датчика 6, усиленный в усилителе 8, С выхода блока . 10 деления сигнал идет на информационный вход блока 12 обратной связи, а на управляющий вход которого поступает сигнал с выхода элемента 11 сравнения. С выхода блока 12 обратной связи сигнал поступает на второй вход электропривода 4.
Так как физически невозможно ввести какую-либо коррекцию в обратную связь по упругому моменту между сумматорами 16 и 18, т о была организована дополнительная отрицательная обратная связь между точками сумматоров 15 и 18. Этим объясняется появление структурного блока 26 с передаточной функцией W (р) - --й-Е,,
АА
Заводя таким образом отрицательную обратную связь по упругому моменту на вход электропривода 4 можем существенно влиять на динамику его работы, автоматически увеличивая или уменьшая степень демпфирования на участке разгона за счет переменности коэффициента обратной связи. Сигнал Y(t) определяется отношением
7(t)
Y(t) Ц . На фиг. 4
и 5 показаны
графики переходных процессов при одной и той же жесткости кинематической передачи на валу электропривода 4 , (((.„(t) и валу объекта 7 регулирования (t) без коррекции и с коррекцией по упругому моменту, при подаче rfa систему скачкообразного входного воздействия. Как видно из них амплитуда колебаний значительно уменьшилась и резко сократилось время переходного процесса. Наличие в данной системе элемента 11 сравнения и управляемого блока 12 обратг- ной связи объясняется тем, что при нулевом входном воздействии вновь организованная обратная связь по упругому моменту должна размыкаться, , при котором образуется единичный импульс и происходит срабатывание аналогового ключа (обратная связь размьжается), выбирается меньше наименьшего входного сигнала, поступающего на систему управления. Таким образом, при входных напряжениях, меньших Upn элемент 11 сравнения постоянно вьщает единичный импульс на управляющий вход блока 12 обратной связи и обратная связь по упругому моменту разомкнута. И наоборот, если на входе элемента 11 .сравнения сигнал больше U, то с его выхода на управляющий вход блока обратной связи 12 идет нулевой сигна и обратная связь по упругому моменту
10
5
0
4
замкнута. На фиг. 3 показана зависимость коэффициента передачи блока деления Kg „ от величины сигнала F. Усилитель 8 позволяет поднимать или опускать эту характеристику. Его коэффициент усиления зависит от жесткости кинематической передачи.
Введение блока деления и дополнительного усилителя в обратную связь по упругому моменту и использование в качестве делителя модуля задающего сигнала позволяет значительно уменьшить колебательность системы - тем самым повысить точность позиционирования и сократить время переходного процесса.
Формула изобретения
Система управления, содержащая блок деления, блок управления, соединенный выходом с управляющим входом блока обратной связи, и задат-
5 чик, подключенный выходом к первому входу измерителя рассогласования, соединенного вторым входом с выходом объекта регулирования, а выходом через предварительный усилитель - с первым входом электропривода, силовой вал Которого,кинематически связан с объектом регулирования с моментным датчиком, отличающаяся тем, что, с целью повышения быстродействия и точности, уменьшения колебательности системы, в нее дополнительно введены усилитель и детектор, соединенный входом с вторым выходом задатчика, а выходом - с входом блока управления и С входом Делитель блока деления, подключенного входом Делимое через усилитель к выходу моментного датчика, а выходом - к информационному
5 входу блока обратной связи, соединенного выходом с вторым входом электропривода .
0
5
0
фиг. 1

| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий электропривод с компенсацией люфта | 1981 |
|
SU981929A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД РОБОТА | 1990 |
|
RU2037173C1 |
| Электропривод постоянного тока с двухзонным регулированием скорости | 1984 |
|
SU1159139A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 1992 |
|
RU2028930C1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 1992 |
|
RU2041054C1 |
| Устройство для управления приводом робота | 1990 |
|
SU1782721A1 |
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2004 |
|
RU2268480C1 |
| ЭЛЕКТРОПРИВОД ПЕРИОДИЧЕСКОГО ДВИЖЕНИЯ | 1998 |
|
RU2148293C1 |

Изобретение относится к робототехнике и может быть использовано при управлении роботаг -манипулято- рами. Целью изобретения является по- вьшение быстродействия и точности и уменьшение колебательности системы. Поставленная цель достигается за счет того, что в ней измеряется момент сопротивления на выходном валу электропривода с помощью моментного датчика. Его выходной сигнал усиливается, преобразуется и делится на модуль сигнала задания, а результирующий сигнал суммируется с усилен- HbiM и преобразованным сигналом рассогласования в те моменты времени, когда модуль сигнала задания превышает некоторое заданное пороговое значение. 5 ил. (Л CAD со
-F
Фие.З
Угол, Hi(H
т. 000 т.ооо
0,000
0.000 Угол, мин
1334104
H(t)
0.200 0.300
о.оа 0.500
ftOO.OOO
0.000
0.000
0.100
Редактор М.Товтин
Составитель Т.Нефедова Техред И.Попович
Заказ 3959/43
Тираж 863Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
0.2000.300
фиг. 5
O.ifOO
0,500
Корректор Л.Пилипенко
| Гулько Л.В | |||
| и Семагина Э.П | |||
| Нелинейные коррекции систем автоматического управления рабочим процессом: В кн | |||
| Автоматизация производственных процессов на открытых горных разработках | |||
| - М.: Недра, 1966, с | |||
| Способ изготовления звездочек для французской бороны-катка | 1922 |
|
SU46A1 |
| УСТРОЙСТВО для ПРОГРАММНОГО УПРАВЛЕНИЯ К СТЕНДУ | 0 |
|
SU241769A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Авторское свидетельство СССР | |||
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ ПРОДОЛЬНОЙ ПОДАЧЕЙ ТОКАРНОГО СТАНКА | 1971 |
|
SU419847A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
