Изобретение относится к системам автоматического управления и регулирования, конкретно к следящим приводам наведения корабельного артиллерийского вооружения.
Известны подобные следящие электрогидравлические приводы: стр. 25, рис. 14-55, "Следящие приводы" под редакцией д.т.н. профессора Б.К.Чемоданова, Москва, Энергия, 1976 г., а также изделия Д-122, Д-213, устанавливаемые на кораблях. Их недостатком является значительная ошибка слежения вооружения за целью, что приводит к снижению эффективности стрельбы.
Известен также следящий электрогидравлический привод Д-219-50, применяемый для наведения корабельного вооружения, наиболее близкий по технической сущности к заявляемому изобретению и принятый за прототип. С его устройством можно ознакомиться в техническом описании ПБ1.342.025 ТО.
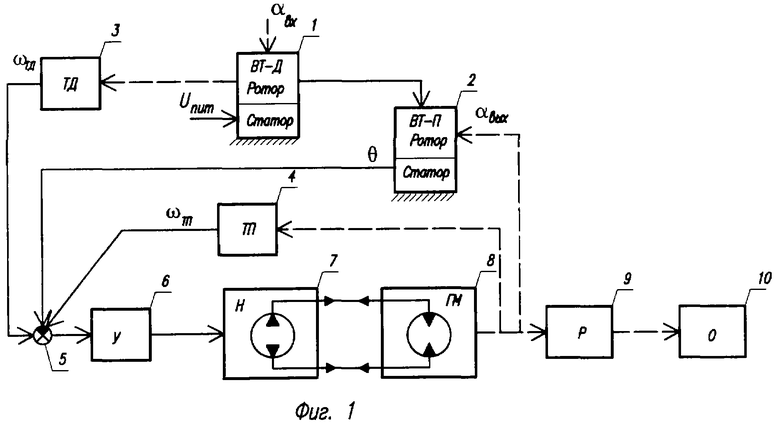
Силовая часть привода (усилитель мощности) построена на основе реверсивного гидронасоса объемного регулирования с электрогидравлическим управлением и гидромотора. Выход гидромотора через силовой редуктор соединен с объектом управления (вооружением) и через измерительный редуктор соединен с ротором ВТ - вращающимся трансформатором принимающим. Сигнал принимающего ВТ является сигналом рассогласования (ошибкой) задающего и исполнительного валов следящего привода, по которому происходит управление приводом.
После преобразования сигнал принимающего ВТ поступает на электронный усилитель, затем на сумматор, где суммируется с сигналами скоростной коррекции (сигналами тахогенераторов, роторы которых соединены с задающей и исполнительной осями привода), и далее суммарный сигнал поступает в электромеханический преобразователь гидроусилителя насоса. Гидромотор поворачивает вал объекта регулирования до тех пор, пока ошибка привода между задающим и принимающим ВТ не станет минимальной для данной структуры привода.
Недостатком прототипа, так же, как и аналогов, является значительная ошибка объекта регулирования по отношению к задатчику угла, уменьшение величины которой ограничивается колебательностью привода и вследствие этого малым коэффициентом усиления системы по углу.
Принимающий ВТ через измерительный редуктор соединен с выходным валом гидромотора, такое размещение принимающего ВТ повышает устойчивость следящего привода, но при этом не учитывается ошибка объекта регулирования, вызванная люфтами и деформацией силовой передачи (редуктора), что снижает точность наведения объекта регулирования, являясь недостатком прототипа.
Изобретение направлено на повышение точности наведения вооружения как за счет снижения колебательности привода и увеличения коэффициента усиления по углу, так и снижения ошибки слежения привода за счет охвата обратной связью силовой передачи.
Это достигается тем, что в следящий электрогидравлический привод, содержащий задающий и принимающий ВТ, тахогенераторы, роторы которых соединены с задающей и исполнительной осями привода, последовательно соединенные первый сумматор, усилитель, реверсивный насос объемного регулирования с электрогидравлическим управлением и гидромотор, соединенный через редуктор с объектом управления, причем выход тахогенератора исполнительной оси соединен с инвертирующим входом первого сумматора, выход тахогенератора задающей оси соединен с неинвертирующим входом первого сумматора, а выход принимающего ВТ соединен с инвертирующим входом первого сумматора, введены первый и второй датчики давления, подсоединенные к выходным полостям насоса, второй сумматор и звено дифференцирования, причем выход первого датчика давления соединен с неинвертирующим входом второго сумматора, выход второго датчика давления соединен с инвертирующим входом второго сумматора, выход второго сумматора соединен с входом звена дифференцирования, выход звена дифференцирования соединен с инвертирующим входом первого сумматора, принимающий ВТ соединен с осью вращения объекта регулирования и измеряет угол рассогласования между заданным положением и положением объекта регулирования.
Сопоставительный анализ с прототипом показывает, что заявляемое устройство отличается наличием новых блоков: датчиков давления, второго сумматора, звена дифференцирования и их связями с остальными блоками системы, а также соединением принимающего ВТ с объектом регулирования.
Сравнение заявляемого решения с другими техническими решениями показывает, что вновь вводимые блоки известны.
Однако при их введении в указанной связи с остальными элементами следящего привода вышеуказанные блоки позволяют повысить точность наведения вооружения в сравнении с известными аналогами и прототипом.
На фиг.1 приведена функциональная схема прототипа.
На фиг.2 приведена функциональная схема заявляемого устройства.
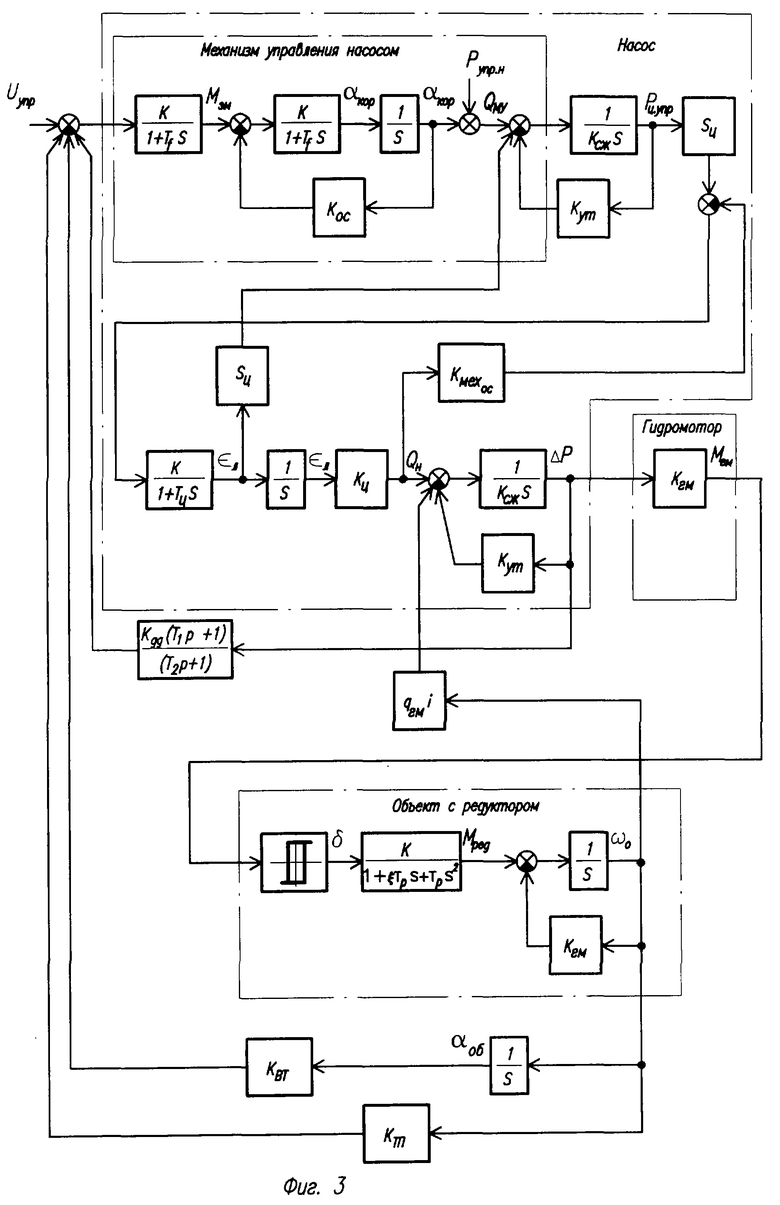
На фиг.3 приведена упрощенная структурная схема заявляемого устройства.
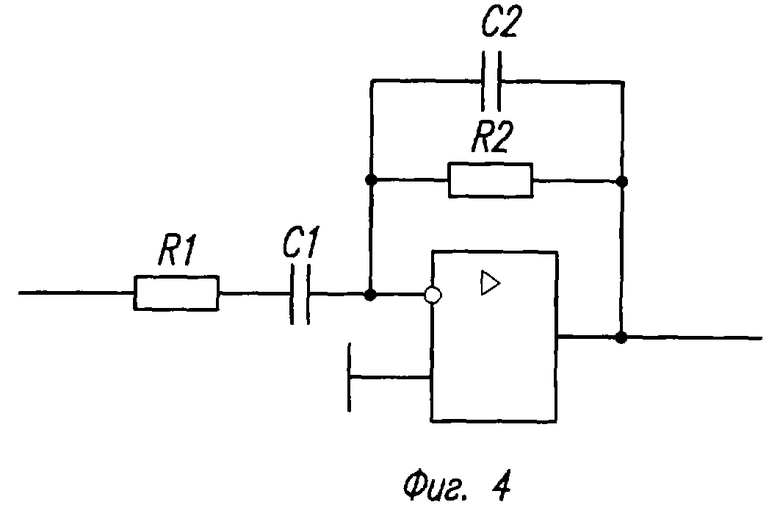
На фиг.4 приведен вариант исполнения дифференцирующего звена.
Пример осуществления изобретения приводится ниже.
Следящий электрогидравлический привод (фиг.2) содержит задающий 1 и принимающий 2 ВТ, тахогенераторы задающей 3 и исполнительной 4 осей, последовательно соединенные первый сумматор 5, усилитель 6, реверсивный насос объемного регулирования с электрогидравлическим управлением 7 и гидромотор 8, соединенный через редуктор 9 с объектом регулирования 10, а также гидромотор 8, кинематически связанный с тахогенератором 4, причем выход тахогенератора исполнительной оси 4 соединен с инвертирующим входом сумматора 5, выход тахогенератора задающей оси 3 соединен с неинвертирующим входом первого сумматора 5, а выход принимающего ВТ 2 соединен с инвертирующим входом первого сумматора 5. Кроме того, привод содержит первый 11 и второй 12 датчики давления, подсоединенные к выходным полостям насоса 7, второй сумматор 13 и звено дифференцирования 14, причем выход первого датчика давления 11 соединен с неинвертирующим входом второго сумматора 13, выход второго датчика давления 12 соединен с инвертирующим входом второго сумматора 13, выход сумматора 13 соединен с входом звена дифференцирования 14, выход звена дифференцирования 14 соединен с инвертирующим входом первого сумматора 5, принимающий ВТ 2 (ротор) кинематически связан с осью вращения объекта регулирования 10 и измеряет рассогласование между заданным угловым положением и положением объекта регулирования 10.
Устройство работает следующим образом.
При наведении объекта специальный маломощный привод разворачивает задающее устройство (ось), с которым кинематически соединен ротор задающего ВТ 1, при этом на роторе задающего и соответственно принимающего ВТ 2 появляется напряжение. На статоре принимающего ВТ 2 возникает напряжение, пропорциональное углу рассогласования между задающей и исполнительной осями, которое является управляющим для привода.
Кроме сигнала принимающего ВТ 2 на первый сумматор 5 поступает сигнал отрицательной обратной связи с тахогенератора 4 по скорости исполнительного вала (гидромотора) и компенсационный сигнал скорости задающего устройства с тахогенератора 3. Тахогенератор 3 кинематически связан с ротором задающего ВТ 1.
Сигнал с сумматора 5 поступает на электронный усилитель 6 и далее на насос 7, который является гидравлическим усилителем мощности. Люлька насоса разворачивается на некоторый угол для создания необходимого расхода рабочей жидкости, которая поступает в гидромотор 8, при этом гидромотор 8 создает вращающий момент и через редуктор 9 приводит в движение объект регулирования 10 до положения, когда угол поворота объекта регулирования совпадает с углом поворота задающей оси. При этом остаточное и текущее напряжения принимающего ВТ 2 в статике и динамике поддерживаются минимальными.
Для снижения ошибки применена дополнительная коррекция по сигналам датчиков давления 11 и 12, сигналы которых в противофазе поступают на второй сумматор 13 и далее на вход дифференцирующего звена 14. С выхода дифференцирующего звена 14 сигнал поступает на инвертирующий вход первого сумматора 5, создавая отрицательную связь по разности давлений выходных полостей насоса. Дифференцирование сигналов датчиков давления осуществляется путем постановки дифференцирующего звена 14 с целью ослабления колебательных свойств привода и повышения жесткости привода (коэффициента усиления) на низких рабочих частотах при моментных возмущениях.
На фиг.3 приведена упрощенная структурная схема заявляемого устройства (из которой видна сложность и высокий порядок следящего привода). Из анализа схемы прослеживается целесообразность введения предлагаемой дополнительной обратной связи по давлению как для улучшения частотных характеристик насоса 7 (фиг.2), так и для повышения устойчивости привода при переносе принимающего ВТ 2 на ось вращения объекта регулирования, поскольку с учетом пересекающихся связей по моменту и скорости оказывается охваченным силовой редуктор.
На фиг.4 приведено дифференцирующее звено.
Таким образом, в заявляемом техническом решении увеличение точности слежения вооружения обеспечивается за счет изменения места установки принимающего ВТ 2 и введения дополнительной коррекции по сигналам датчиков давления 11, 12 (фиг.2) в выходных полостях насоса 7 (фиг.2), позволяющей не только обеспечить устойчивость привода при изменении места установки ВТ 2 принимающего, но и уменьшить величину ошибки самого привода.
Заявляемое техническое решение проверено испытаниями опытных образцов, которые показали увеличение точности (уменьшение ошибки) слежения примерно на 30% и повышение стрельбовой эффективности вооружения.
Литература
1. Основы проектирования следящих систем / Под ред. Н.А.Локоты - М.: Машиностроение, 1978, - 322 с.
2. Проектирование и расчет автоматизированных приводов / Под ред. В.И.Смирнова, В.И.Разинцева - М.: Машиностроение, 1990, 350 с.
3. Следящие приводы. В 2-х кн. / Под ред. Б.К.Чемоданова - М.: Энергия, 1976.
4. Справочник по средствам автоматики / Под ред. В.Э.Низэ, И.В.Антика - М.: Энергоатомиздат, 1983, - 504 с.
5. Техническая кибернетика. В 3-х кн. / Под ред. В.В.Солодовникова - М.: Машиностроение, 1967.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлический следящий привод | 1986 |
|
SU1399521A2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1985 |
|
RU2099765C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СТАБИЛИЗАТОР ТАНКОВОГО ВООРУЖЕНИЯ | 2001 |
|
RU2207489C2 |
| Электрогидравлический следящий привод | 1987 |
|
SU1530823A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2014 |
|
RU2554152C1 |
| АРТИЛЛЕРИЙСКАЯ УСТАНОВКА | 2002 |
|
RU2233415C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ | 2006 |
|
RU2311568C2 |
| Следящая система | 1981 |
|
SU993202A1 |
| Электрогидравлический следящий привод | 1986 |
|
SU1346858A1 |
Изобретение относится к системам автоматического управления и регулирования. Технический результат заключается в повышении точности. Следящий электрогидравлический привод, содержит задающий и принимающий вращающийся трансформатор (ВТ), задающий и принимающий тахогенераторы, реверсивный насос объемного регулирования и гидромотор, а принимающий тахогенератор соединен через приборный редуктор с валом гидромотора, устройство дополнительно содержит датчики давления, подсоединенные к выходным полостям насоса, второй сумматор и звено дифференцирования, а принимающий ВТ кинематически связан с осью вращения объекта регулирования. 4 ил.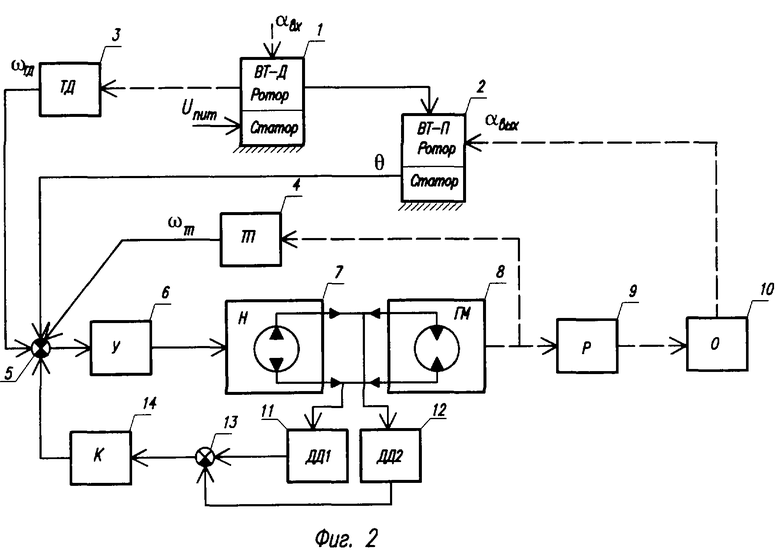
Следящий электрогидравлический привод, содержащий задающий и принимающий вращающиеся трансформаторы, тахогенераторы задающей и исполнительной осей, последовательно соединенные первый сумматор, усилитель, реверсивный насос объемного регулирования с электрогидравлическим управлением и гидромотор, соединенный через редуктор с объектом регулирования, причем выход тахогенератора исполнительной оси соединен с инвертирующим входом первого сумматора, выход тахогенератора задающей оси соединен с неинвертирующим входом первого сумматора, а выход принимающего вращающегося трансформатора соединен с инвертирующим входом первого сумматора, отличающийся тем, что в него введены первый и второй датчики давления, подсоединенные к выходным полостям насоса, второй сумматор и звено дифференцирования, причем выход первого датчика давления соединен с неинвертирующим входом второго сумматора, выход второго датчика давления соединен с инвертирующим входом второго сумматора, выход второго сумматора соединен со входом звена дифференцирования, выход звена дифференцирования соединен с инвертирующим входом первого сумматора, принимающий вращающийся трансформатор кинематически связан с осью вращения объекта регулирования.
| Силовой электрогидравлический следящий привод | 1975 |
|
SU589590A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА | 1996 |
|
RU2111521C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2001 |
|
RU2220431C2 |
| Система управления электрогидравлическим манипулятором | 1977 |
|
SU714348A1 |
| Копировальный агрегат к универсальным станкам | 1949 |
|
SU93348A1 |

