to
11334339
Изобретение относится к электротехнике и может быть использовано в электроприводах постоянного тока.
Цель изобретения - повьпиение точности стабилизации частоты вращения.
На чертеже приведена схема электопривода.
Электропривод постоянного тока содержит электродвигатель 1, подклюенный к блоку 2 управления, фазовый 3 и частотный 4 дискриминаторы, з ада- щий генератор 5, выход которого одключен к первым входам фазового 3 и частотного 4 дискриминаторов, мпульсный датчик 6 частоты вращения, выход которого соединен с вторыми входами фазового 3 и частотного 4 искриминаторов, выходы которых связаны -с входами блока 2 управления, лектропривод также содержит первый 7 и второй 8 сумматоры, первые входы которых соединены с выходом дискри- минатора 3, блок 9 деления, выход которого подключен к второму входу первого сумматора 7, делитель 10 чассяна не по ри вх сп ля ро сн на
15
20
чи зо ва щи го ва па вх си 25 за .пр ся на
дом импульсного датчика 6 частоты вращения, цифровую линию 11 задержки, информационный вход которой соединен с выходом второг о сумматора 8, а выход подключен к входу блока 9 деления и второму входу второго сумматора 8, логический ключ 12 с управляющим входом Пуск компенсации, включенный между входом синхронизации цифровой линии 11 задержки и выходом делителя 10 частоты, цифроаналоговый преобразователь, включенньй между выходом первого сумматора 7 и первым входом блока 2 управления, второй вход которого соединен с выходом частотного дискриминатора.
Электропривод работает сотедующим образом.
При появлении сигнала, соответствующего пуску электродвигателя 1, происходит очистка содержимого ячеек цифровой линий 11 задержки и запуск блока 2 управления, на котором фор30
Сигнал с выхода импульсного датчика 6 поступает на второй вход фазового дискриминатора 3 , где сравнивается по фазе с сигналом, поступающим на первый: вход с выхода задающего генератора 5, Сигнал рассогласования по фазе в цифровой форме поступает чере сумматор 7 (на второй его . вход через блок 9 деления поступает сигнал с выхода цифровой линии 11 25 задержки) на вход цифроаналогового .преобразователя 13, где преобразуется в напряжение, которое поступает на первый вход блока 2 управления.
Поступление сигнала рассогласования по фазе приводит к тому, что сигнал на вькоде импульсного датчика 6 синхронизируется с сигналом на выходе задающего генератора 5, Далее система управления поддерживает синхронное состояние.
Поступление сигшша на вход Пуск компенсации ключа 12 разрешает поступление импульсов с выхода импульсного датчика 6 через делитель 10 частоты с коэффициентом деления п на вход синхронизации цифровой линии 11 задержки. При этом происходит продвижение содержимого ячеек цифровой линии 11 задержки от входа к выходу с периодом квантования Т. п,Т (т - исходный период квантования).
Так как содержимое ячеек цифровой линии 11 задержки было очищено при запуске электродвигателя, то на вход цифровой линии 11 задержки поступает
35
40
13
кп мируется управляющее напряжение, пос- значение равное рассогласованию по
тупающее на электродвигатель 1« Элек-фазе в конце периода квантования Т
тродвигатель 1 вращает вал импульсно-и поступающее с выхода фазового дис кго датчика 6. На его выходе появляет-риминатора 3 через сумматор 8, Рабося импульсный сигнал, частота которо-та остальных элементов электроприво- го пропорциональная частоте вращения 55 д g течение первого оборота вала,
электродвигателя 1,начиная от поступления сигнала на
Сигнал с выхода импульсного датчи-вход Пуск компенсации ключа 12,
ка 6 поступает на второй вход частот-не изменяется.
ся по частоте с сигналом, поступающим на первый вход с выхода задающего генератора 5, Сигнал рассогласования по частоте с выхода частотного дискриминатора 4 поступает на второй вход блока 2 управления и тем самым способствует разгону электродвигателя 1 до частоты вращения, при которой частота сигнала на выходе импульсного датчика 6 близка к частоте сигнала на выходе задающего генератора 5.
Сигнал с выхода импульсного датчика 6 поступает на второй вход фазового дискриминатора 3 , где сравнивается по фазе с сигналом, поступающим на первый: вход с выхода задающего генератора 5, Сигнал рассогласования по фазе в цифровой форме поступает чере сумматор 7 (на второй его . вход через блок 9 деления поступает сигнал с выхода цифровой линии 11 задержки) на вход цифроаналогового преобразователя 13, где преобразуется в напряжение, которое поступает на первый вход блока 2 управления.
Поступление сигнала рассогласования по фазе приводит к тому, что сигнал на вькоде импульсного датчика 6 синхронизируется с сигналом на выходе задающего генератора 5, Далее система управления поддерживает синхронное состояние.
Поступление сигшша на вход Пуск компенсации ключа 12 разрешает поступление импульсов с выхода импульсного датчика 6 через делитель 10 частоты с коэффициентом деления п на вход синхронизации цифровой линии 11 задержки. При этом происходит продвижение содержимого ячеек цифровой линии 11 задержки от входа к выходу с периодом квантования Т. п,Т (т - исходный период квантования).
Так как содержимое ячеек цифровой линии 11 задержки было очищено при запуске электродвигателя, то на вход цифровой линии 11 задержки поступает
значение равное рассогласованию по
13
с к
Через 1 импульсов синхронизации цифровой линии 11 задержки (это соответствует окончанию первого оборота вала, так как 1-п N, где N - число импульсов на один оборот вала импульсного датчика 6) на ее выходе появляется сигнал, равный значению рассогласования по фазе соответствующего, этому же положению вала электродвигателя 1, но на предьщущем его обороте.
Сигнал с выхода цифровой линии 11 задержки через блок 9 деления с коэффициентом деления К поступает на вто- рой вход сумматора 7, где суммируется с текущим значением рассогласования и используется для компенсации ошибки, периодически повторяющейся .при вращении вала электродвигателя 1. Сигнал с выхода цифровой линии 11 задержки поступает на второй вход сумматора 8, На вход цифровой линии 11 задержки поступает сумма сигналов рассогласования по фазе на первом и втором оборотах вала электродвигателя 1 .
На следующих оборотах вала электродвигателя 1 на вход, .цифровой линии 11 задержки поступает сумма рассогласований по фазе на текущем и всех предьщущих оборотах вала. На второй вход сумматора 7 поступает компенсационный сигнал, в К раз меньший суммы рассогласований по фазе на предыдущих оборотах вала, поступающей с выхода цифровой линии 11 задержки,
Таким образом, осуществляется итерационный процесс компенсации периодически повторяющихся составляю
Составитель В,Трофименко Редактор И,Касарда Техред М.Ходанич Корректор И,Муска
Заказ 3977/55 Тираж 659Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва Ж-35, Раушская наб,, д.4/5
.Производственно-полиграфическое предприятие, г,Ужгород, ул,Проектная, 4
0
0
g
5
0
5
щкх ошибки системы стабилизации частоты вращения.
Формула изобретения
Электропривод постоянного тока, содержащий электродвигатель,подключенный к блоку управления, фазовьй и частотньй дискриминаторы, задающий генератор, выход которого подключен к первым входам фазового и частотного дискриминаторов, импульсный датчик частоты вращения, выход которого соединен с вторыми входами фазового и частотного дискриминаторов, отличающийся тем, что, с целью повьшения точности стабилизации, в него введены первый и второй сумматоры, первые входы которых соединены с выходом фазового дискриминатора, блок деления, выход которого подключен к второму входу первого сумматора, делитель частоты, вход которого соединен с выходом импульсного датчика частоты вращения, цифровая линия задержки, информационный вход которой соединен с выходом второго сумматора, а выход подключен к входу блока деления и второму входу второго сумматора, логический ключ с управляющим входом Пуск компенсации, включенньй между входом синхронизации цифровой линии задержки и выходом делителя частоты, цифроана- логовый преобразователь, включенный между выходом первого сумматора и перрым входом блока управления , второй вход которого соединен с выходом частотного дискриминатора.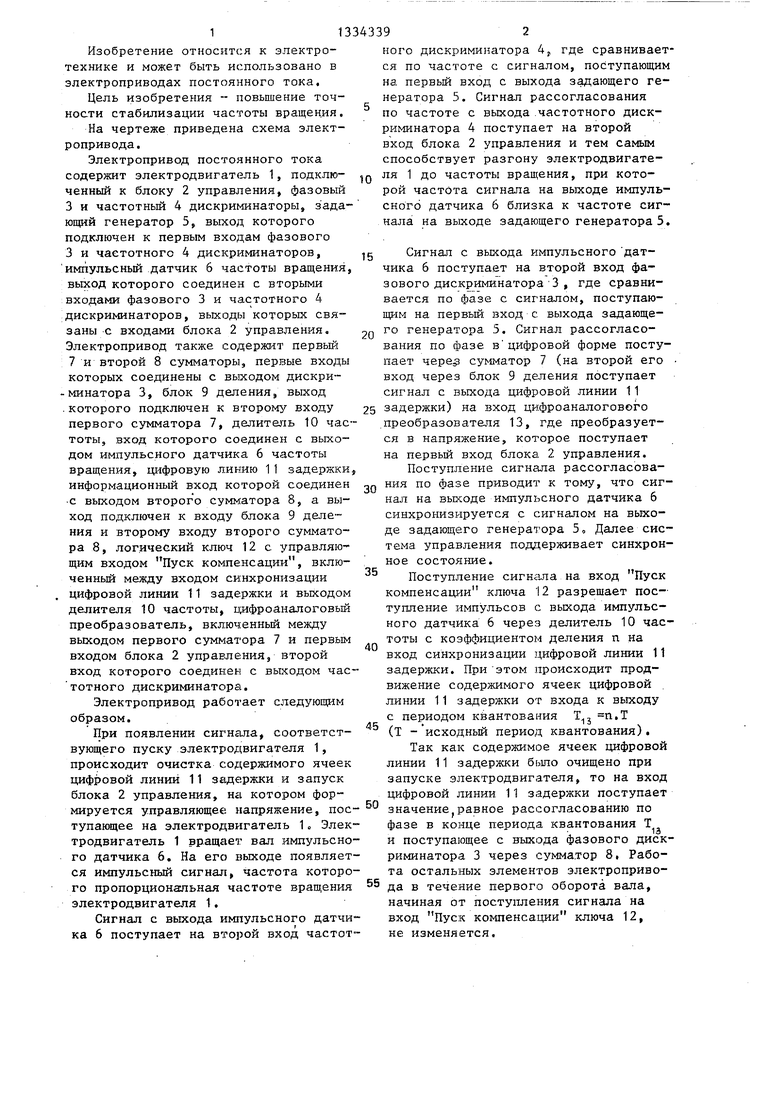
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАБИЛИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД | 2015 |
|
RU2585241C1 |
| СТАБИЛИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД | 2016 |
|
RU2621288C1 |
| Стабилизированный электропривод постоянного тока | 1986 |
|
SU1359879A1 |
| Устройство для стабилизации частоты вращения электродвигателя | 1982 |
|
SU1051678A1 |
| Электропривод | 1987 |
|
SU1453569A1 |
| Устройство для регулирования скорости электропривода | 1988 |
|
SU1539725A1 |
| ЦИФРОВАЯ СИСТЕМА СТАБИЛИЗАЦИИ СКОРОСТИ | 1990 |
|
RU2047890C1 |
| Цифровой демодулятор сигналов фазоразностной модуляции второго порядка | 1989 |
|
SU1716616A1 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2010 |
|
RU2422978C1 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2485665C1 |
Изобретение относится к электротехнике и предназначено для стабилизации скорости вращения электродвигателя с высокой динамической точрос- тью. Целью изобретения является повышение точности стабилизации. В им- пульсно-фазовую систему стабилизации скорости вращения вводится цифровая линия 11 задержки, на вход которой поступает сигнал, равный сумме сигнала рассогласования и сигнала, снимаемого с выхода цифровой линии 11 задержки. Задержанный в цифровой линии 1 задержки на время одного оборота вала электродвигателя 1 сигнал складывается с сигналом рассогласования и служит для формирования регулирующего воздействия. Данное устройство обеспечивает итерационный процесс накопления в цифровой линии 11 задержки сигнала, компенсирующего возмущения, синхронные с частотой вращения электродвигателя 1. 1 ил. S (Л ffycK дби ателя СХ) со со со Пуек компенсации
| .Менский Б.Н | |||
| Принципы инвариантности в автоматическом регулирова- - НИИ и управлении, 1972, ст | |||
| Плуг с фрезерным барабаном для рыхления пласта | 1922 |
|
SU125A1 |
| Батарин А.В | |||
| и др | |||
| Управление электроприводами | |||
| Л.: Энергоиздат, 1982, ст.181. | |||
