Изобретение относится к электротехнике, а именно к устройствам автоматического фазирования синхронизированных электроприводов с фазовой автоподстройкой частоты вращения, и может быть использовано в системах передачи и воспроизведения информации, например в приводе устройств видеозаписи.
Известно устройство синхронно-синфазный электропривод (а.с. СССР №1591172 МКИ5 Н02Р 5/50, 5/06, 1990 г.), содержащий электродвигатель с импульсными датчиками частоты и положения ротора, установленными на его валу, последовательно соединенные частотно-фазовый дискриминатор, блок коррекции, статический преобразователь, выходом подключенный к якорной обмотке электродвигателя, а также блок определения фазового рассогласования, формирователь дополнительных импульсов, два блока суммирования импульсов, блок наличия частоты, частотно-задающий блок, первый выход которого подключен к первому входу блока определения фазового рассогласования и первому входу второго блока суммирования импульсов, а второй выход соединен со вторым входом блока определения фазового рассогласования, третий вход которого подключен к выходу импульсного датчика положения ротора, третий выход блока определения фазового рассогласования подключен к четвертому входу первого блока суммирования импульсов, третий вход которого подключен к первому выходу блока определения фазового рассогласования, а второй вход подключен к выходу формирователя дополнительных импульсов, первый вход которого подключен к выходу импульсного датчика положения ротора, а второй вход подключен к выходу блока наличия частоты, вход которого подключен к выходу частотно-фазового дискриминатора, второй вход которого подключен к выходу первого блока суммирования импульсов, а первый вход подключен к выходу второго блока суммирования импульсов, второй вход которого подключен к выходу формирователя дополнительных импульсов, а третий и четвертый входы подключены соответственно к первому и второму выходам блока определения фазового рассогласования.
Недостатками этого устройства является следующее.
1. Низкое быстродействие электропривода в области низких частот вращения, обусловленное увеличением периода следования дополнительных импульсов, в качестве которых используется частота Foc (зависящая от задающей частоты ƒоп), и, следовательно, увеличением продолжительности цикла фазирования.
2. В области высоких частот вращения из-за частого прохождения дополнительных импульсов происходит накопление скоростной ошибки в каждом цикле фазирования, что приводит к невозможности синхронизации электропривода при достижении Δαф=0 и, следовательно, снижению быстродействия электропривода из-за необходимости повторения процесса фазирования.
3. Низкое быстродействие блока определения фазового рассогласования (определение Δαф, осуществляется 1 раз за оборот вала электродвигателя).
Наиболее близким техническим решением к заявляемому устройству является синхронно-синфазный электропривод [Патент РФ №2422978], содержащий электродвигатель с установленным на его валу блоком импульсных датчиков, последовательно соединенные частотно-фазовый дискриминатор, блок коррекции, статический преобразователь, выходом подключенный к якорной обмотке электродвигателя, блок определения фазового рассогласования, формирователь дополнительных импульсов, смеситель, блок задания частоты, первый и второй выходы которого соединены соответственно с первым и вторым входами блока определения фазового рассогласования, первый выход блока импульсных датчиков подключен к шестому входу смесителя, первый вход которого подключен к первому выходу блока задания частоты, третий вход - к выходу формирователя дополнительных импульсов, а второй, четвертый и пятый входы - соответственно ко второму, третьему и первому выходам блока определения фазового рассогласования, третий вход которого подключен ко второму выходу блока импульсных датчиков, первый и второй выходы смесителя подключены соответственно к первому и второму входам частотно-фазового дискриминатора, при этом блок импульсных датчиков выполнен в виде импульсного датчика частоты и импульсного датчика положения ротора, объединенные входы которых являются входом блока импульсных датчиков, выход импульсного датчика частоты является первым выходом блока импульсных датчиков, а выход импульсного датчика положения ротора является вторым выходом блока импульсных датчиков, кроме того, смеситель выполнен в виде двух блоков суммирования импульсов, при этом третий и четвертый входы первого блока суммирования импульсов являются соответственно пятым и шестым входами смесителя, первый и четвертый входы второго блока суммирования импульсов являются соответственно первым и вторым входами смесителя, а первый и второй входы первого блока суммирования импульсов, объединенные соответственно со вторым и третьим входами второго блока суммирования импульсов, являются соответственно третьим и четвертым входами смесителя, выходы первого и второго блоков суммирования импульсов являются соответственно вторым и первым выходами смесителя, блок определения фазового рассогласования выполнен в виде первого счетчика импульсов, тактовый вход, объединенный с первым входом схемы разделения совпадающих импульсов, и вход сброса которого являются соответственно первым и вторым входами блока определения фазового рассогласования, а выходы подключены к информационным входам второго счетчика импульсов, при этом тактовый вход второго счетчика импульсов является третьим входом блока определения фазового рассогласования, а входы суммирования и вычитания импульсов подключены соответственно к первому и второму выходам схемы разделения совпадающих импульсов, второй вход которой является четвертым входом блока определения фазового рассогласования, выходы второго счетчика импульсов подключены к входам первого и второго блоков выделения кода, при этом первый и второй выходы первого блока выделения кода являются соответственно первым и вторым выходами блока определения фазового рассогласования, а выход второго блока выделения кода является третьим выходом блока определения фазового рассогласования, формирователь дополнительных импульсов выполнен в виде последовательно соединенных нелинейного элемента с зоной нечувствительности, вход которого является входом формирователя дополнительных импульсов, и одновибратора, выход которого является выходом формирователя дополнительных импульсов, кроме того первый выход блока импульсных датчиков подключен к четвертому входу блока определения фазового рассогласования, выход частотно-фазового дискриминатора подключен к входу формирователя дополнительных импульсов.
Существенным недостатком известного устройства является низкое быстродействие синхронно-синфазного электропривода, обусловленное его переводом в режим фазирования после завершения процесса синхронизации электропривода.
Задачей изобретения является повышение быстродействия электропривода при переходе в синхронно-синфазный режим работы.
Известный синхронно-синфазный электропривод содержит электродвигатель с установленным на его валу блоком импульсных датчиков, последовательно соединенные частотно-фазовый дискриминатор, блок коррекции, статический преобразователь, выходом подключенный к якорной обмотке электродвигателя, блок определения фазового рассогласования, формирователь дополнительных импульсов, смеситель, блок задания частоты, первый и второй выходы которого соединены соответственно с первым и вторым входами блока определения фазового рассогласования, первый выход блока импульсных датчиков подключен к шестому входу смесителя, второй, четвертый и пятый входы которого подключены соответственно ко второму, третьему и первому выходам блока определения фазового рассогласования, третий вход которого подключен ко второму выходу блока импульсных датчиков, первый и второй выходы смесителя подключены соответственно к первому и второму входам частотно-фазового дискриминатора, при этом блок импульсных датчиков выполнен в виде импульсного датчика частоты и импульсного датчика положения ротора, объединенные входы которых являются входом блока импульсных датчиков, выход импульсного датчика частоты является первым выходом блока импульсных датчиков, а выход импульсного датчика положения ротора является вторым выходом блока импульсных датчиков, кроме того, смеситель выполнен в виде двух блоков суммирования импульсов, при этом третий и четвертый входы первого блока суммирования импульсов являются соответственно пятым и шестым входами смесителя, первый и четвертый входы второго блока суммирования импульсов являются соответственно первым и вторым входами смесителя, а первый и второй входы первого блока суммирования импульсов, объединенные соответственно со вторым и третьим входами второго блока суммирования импульсов, являются соответственно третьим и четвертым входами смесителя, выходы первого и второго блоков суммирования импульсов являются соответственно вторым и первым выходами смесителя, кроме того первый выход блока импульсных датчиков подключен к четвертому входу блока определения фазового рассогласования, выход частотно-фазового дискриминатора подключен к входу формирователя дополнительных импульсов.
Поставленная задача решена за счет того, что в синхронно-синфазный электропривод введены две схемы сравнения, схема И, блок определения частотного рассогласования, цифровой ключ и D-триггер. Первый вход смесителя подключен к выходу цифрового ключа, первый вход которого подключен к третьему выходу блока задания частоты, второй вход объединенный с первым входом блока определения частотного рассогласования и подключен к первому выходу блока задания частоты. Третий вход смесителя подключен к выходу схемы И, второй вход которой подключен к выходу формирователя дополнительных импульсов, а первый вход подключен к выходу первой схемы сравнения. Входы первой схемы сравнения, объединенные с входами второй схемы сравнения, подключены к выходам блока определения частотного рассогласования, второй вход которого подключен к первому выходу блока импульсных датчиков. Выход второй схемы сравнения подключен к синхровходу D-триггера, инверсный R-вход которого подключен к третьему выходу блока определения фазового рассогласования, выход которого подключен к управляющему входу цифрового ключа. Блок определения частотного рассогласования выполнен в виде высокочастотного генератора импульсов, счетчика импульсов, RS-триггера, одновибратора, D-триггера и регистра. S вход RS-триггера объединен с синхровходом D-триггера и является первым входом блока определения частотного рассогласования. R вход RS-триггера является вторым входом блока определения частотного рассогласования. Прямой выход RS-триггера подключен к D входу D-триггера, выход которого через одновибратор подключен одновременно к своему R входу, к R входу счетчика импульсов и к синхровходу регистра, выходы которого являются выходами блока определения частотного рассогласования. D входы регистра подключены к выходам счетчика импульсов, синхровход которого является выходом высокочастотного генератора импульсов.
Сущность технического решения пояснена чертежами, где
на фиг.1 приведена функциональная электрическая схема предлагаемого устройства;
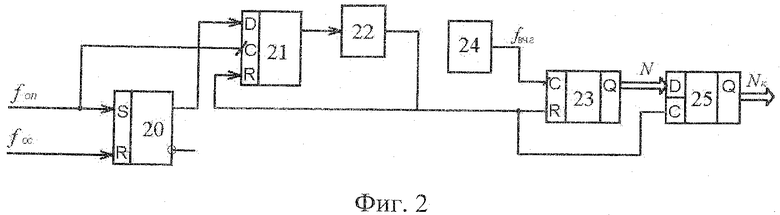
на фиг.2 приведена функциональная схема блока определения частотного рассогласования предлагаемого устройства;
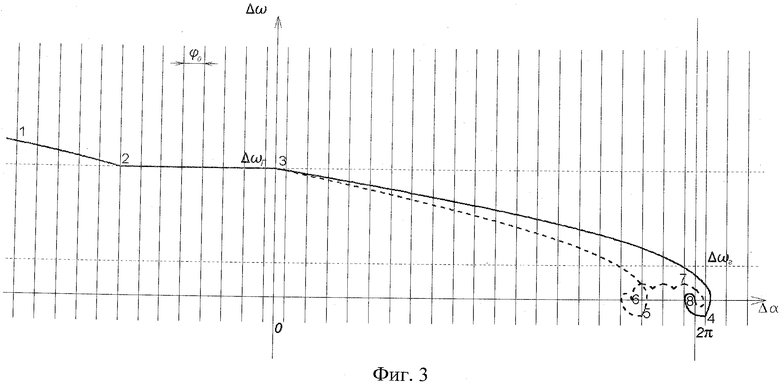
на фиг.3 приведен фазовый портрет работы предлагаемого устройства,
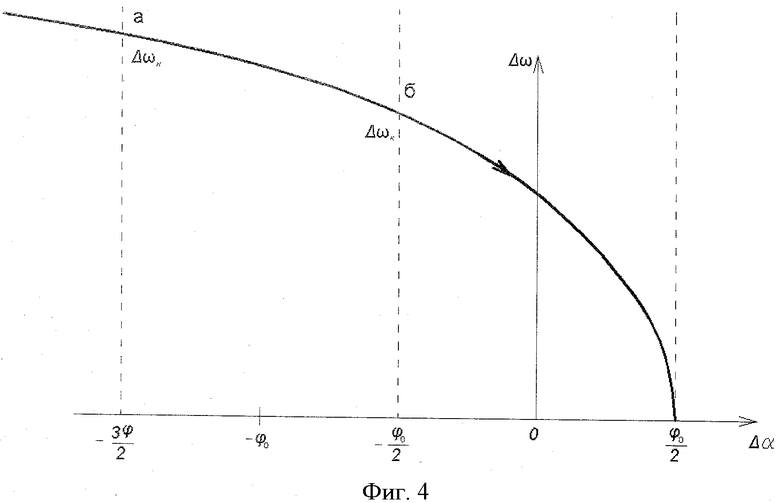
на фиг.4 приведен фазовый портрет работы электропривода в режиме разгона с максимальным ускорением;
на фиг.5 приведена временная диаграмма работы электропривода в режиме разгона с максимальным ускорением.
Синхронно-синфазный электропривод содержит электродвигатель 1, блок импульсных датчиков 2, блок задания частоты 3, смеситель 4, частотно-фразовый дискриминатор 5, блок коррекции 6, статический преобразователь 7, блок определения фазового рассогласования 8, формирователь дополнительных импульсов 9, цифровой ключ 14, схему И 15, D-триггер 16, схемы сравнения 17 и 18, блок определения частотного рассогласования 19.
На валу электродвигателя 1 установлен блок импульсных датчиков 2. Первый выход блока импульсных датчиков 2 подключен к четвертому входу блока определения фазового рассогласования 8, к второму входу блока определения частотного рассогласования 19 и к шестому входу смесителя 4, первый вход которого подключен к выходу цифрового ключа 14. Первый и второй вход цифрового ключа 14 подключены соответственно к третьему выходу блока задания частоты 3, второй вход объединен с первым входом блока определения частотного рассогласования 19 и подключен к первому выходу блока задания частоты. Второй, четвертый и пятый входы смесителя 4 подключены соответственно ко второму, третьему и первому выходам блока определения фазового рассогласования 8. Третий вход смесителя 4 подключен к выходу схемы И 15, второй вход которой подключен к выходу формирователя дополнительных импульсов 9, а первый вход подключен к выходу первой схемы сравнения 17. Входы первой схемы сравнения 17 объединены с входами второй схемы сравнения 18 и являются выходами блока определения частотного рассогласования 19. Выход второй схемы сравнения 18 подключен к синхровходу D-триггера 16, инверсный R вход которого подключен к третьему выходу блока определения фазового рассогласования 8, а выход подключен к управляющему входу цифрового ключа 14. Второй выход блока импульсных датчиков 2 подключен к третьему входу блока определения фазового рассогласования 8, первый и второй входы которого подключены соответственно к первому и второму выходам блока задания частоты 3. Первый и второй выходы смесителя 4 подключены соответственно к первому и второму входам частотно-фазового дискриминатора 5, выход которого подключен к входу формирователя дополнительных импульсов 9 и к входу блока коррекции 6. Выход блока коррекции 6 подключен к входу статического преобразователя 7, выходом подключенного к якорной обмотке электродвигателя 1.
Блок импульсных датчиков 2 выполнен в виде импульсного датчика частоты 10 и импульсного датчика положения ротора 11. Вход блока импульсных датчиков 2 является входом импульсного датчика частоты 10 и входом импульсного датчика положения ротора 11. Выходы импульсного датчика частоты 10 и импульсного датчика положения ротора 11 являются соответственно первым и вторым выходами блока импульсных датчиков 2.
Смеситель 4 выполнен в виде блоков суммирования импульсов 12 и 13. Третий и четвертый входы блока суммирования импульсов 12 являются соответственно пятым и шестым входами смесителя 4. Первый и четвертый входы блока суммирования импульсов 13 являются соответственно первым и вторым входами смесителя 4. Первый и второй входы блока суммирования импульсов 12, объединенные соответственно со вторым и третьим входами блока суммирования импульсов 13, являются соответственно третьим и четвертым входами смесителя 4. Выходы блоков суммирования импульсов 12 и 13 являются соответственно вторым и первым выходами смесителя 4.
Блок определения частотного рассогласования 19 выполнен в виде RS-триггера 20, D-триггера 21, одновибратора 22, счетчика импульсов 23, высокочастотного генератора импульсов 24 и регистра 25. S вход RS-триггера 20 объединен с синхровходом D-триггера 21 и является первым входом блока определения частотного рассогласования 19. R вход RS-триггера 20 является вторым входом блока определения частотного рассогласования 19. Прямой выход RS-триггера 20 подключен к D входу D-триггера 21, выход которого через одновибратор 22 подключен одновременно к своему R входу к R входу счетчика импульсов 23 и к синхровходу регистра 25, выходы которого являются выходами блока определения частотного рассогласования 19. D входы регистра 25 подключены к выходам счетчика импульсов 23, синхровход которого является выходом высокочастотного генератора импульсов 24.
Синхронно-синфазный электропривод работает следующим образом.
Блок задания частоты 3 служит для формирования частотного сигнала ƒоп, определяющего частоту вращения электродвигателя 1 в требуемом диапазоне частот вращения, импульсов угловой привязки Fоп, обеспечивающих синфазный режим работы электропривода и частотного сигнала

определяющего частоту вращения электродвигателя, на которой осуществляется предварительное фазирование. Значение ΔƒГ, в уравнении (1) можно получить из следующего уравнения:
 Δ,
Δ,
где  - ошибка по угловой скорости электродвигателя, при которой в случае переключения электродвигателя в режим максимального разгона, за время разгона электродвигателя до опорной частоты ƒоп, фазовая ошибка изменится на значение Δα0=2π, соответствующее довороту вала на один оборот. Уравнение
- ошибка по угловой скорости электродвигателя, при которой в случае переключения электродвигателя в режим максимального разгона, за время разгона электродвигателя до опорной частоты ƒоп, фазовая ошибка изменится на значение Δα0=2π, соответствующее довороту вала на один оборот. Уравнение  выводится аналогично уравнению
выводится аналогично уравнению  (Бубнов А.В. Вопросы теории и проектирования прецизионных синхронно-синфазных электроприводов постоянного тока: монография. - Омск: Редакция журнала «Омский научный вестник», 2005. - 190 с., 39 с., 94 с.), где
(Бубнов А.В. Вопросы теории и проектирования прецизионных синхронно-синфазных электроприводов постоянного тока: монография. - Омск: Редакция журнала «Омский научный вестник», 2005. - 190 с., 39 с., 94 с.), где
 - угловое расстояние между соседними метками ИДЧ, z - число импульсов ИДЧ за один оборот вала электродвигателя, за исключением того, что рассматривается участок фазовой траектории, на котором значение фазовой ошибки Δα изменяется на величину, равную φ0z=2π, а не на величину, равную φ0. Электродвигатель 1 является исполнительным элементом электропривода и обеспечивает вращение выходного вала с требуемой угловой скоростью.
- угловое расстояние между соседними метками ИДЧ, z - число импульсов ИДЧ за один оборот вала электродвигателя, за исключением того, что рассматривается участок фазовой траектории, на котором значение фазовой ошибки Δα изменяется на величину, равную φ0z=2π, а не на величину, равную φ0. Электродвигатель 1 является исполнительным элементом электропривода и обеспечивает вращение выходного вала с требуемой угловой скоростью.
При включении синхронно-синфазного электропривода на первый вход частотно-фазового дискриминатора 5 через смеситель 4 с выхода цифрового ключа 14 поступает сигнал ƒоп, формируемый на первом выходе блока задания частоты 3. На второй вход частотно-фазового дискриминатора 5 через смеситель 4 поступают импульсы частоты ƒос с выхода блока импульсных датчиков 2, предназначенного для получения сигнала обратной связи по частоте вращения ƒос и формирования сигнала начала отсчета углового положения ротора Fос с целью обеспечения синфазного режима работы электропривода. Частота следования импульсов ƒос пропорциональна частоте вращения электродвигателя 1. Частотно-фазовый дискриминатор 5 проводит сравнение частот импульсных последовательностей ƒоп и ƒос и выдает сигнал γ высокого уровня на разгон электродвигателя, так как ƒоп>ƒос.
Управляющий сигнал γ с выхода частотно-фазового дискриминатора 5 через блок коррекции 6, предназначенный для формирования управляющего сигнала с целью обеспечения устойчивой работы электропривода, и статический преобразователь 7, обеспечивающий усиление управляющего сигнала и его преобразование в требуемый ток в обмотках электродвигателя 1, поступает в обмотки электродвигателя 1, обеспечивая его разгон с максимальным ускорением, и электродвигатель 1 стремится разогнаться до синхронной с опорным сигналом частоты вращения (участок 1-2 фазовой траектории фиг.3). При этом частота ƒос на выходе блока импульсных датчиков 2 возрастает. Сигнал ƒос с выхода блока импульсных датчиков 2 поступает на второй вход блока определения частотного рассогласования 19, на первый вход которого поступает сигнал опорной частоты ƒоп. Блок определения частотного рассогласования 19 формирует на своих выходах двоичный код Nк, равный количеству импульсов N высокочастотного генератора импульсов 24 (фиг.2) между ситуациями прохождения двух импульсов одной частоты между двумя соседними импульсами другой частоты, что соответствует прохождению рабочей точкой значений  , (где n - целое число) на фазовом портрете (фиг.4) разгона электропривода. Время tΔ прохождения рабочей точкой участка а-б (равного φ0) на фазовом портрете разгона с максимальным ускорением εm электропривода пропорционально подсчитанному количеству импульсов N высокочастотного генератора импульсов 24:
, (где n - целое число) на фазовом портрете (фиг.4) разгона электропривода. Время tΔ прохождения рабочей точкой участка а-б (равного φ0) на фазовом портрете разгона с максимальным ускорением εm электропривода пропорционально подсчитанному количеству импульсов N высокочастотного генератора импульсов 24:

где Твчг - период импульсов высокочастотного генератора импульсов 24.
Т.к. на участке а-б угловое ускорение εm постоянно, то средняя ошибка по угловой скорости Δωср электропривода находится по уравнению:
Временная диаграмма Δω=ƒ(t) работы электропривода в режиме разгона представлена на фиг.5. Зная значение Δωср, можно определить значение ошибки по угловой скорости Δωк в точке б:
 .
.
Таким образом, зависимость значения ошибки по угловой скорости электропривода в момент прохождения рабочей точкой значений
 от количества импульсов Nк высокочастотного генератора импульсов 24 с учетом (2) и (3) может быть представлена в виде:
от количества импульсов Nк высокочастотного генератора импульсов 24 с учетом (2) и (3) может быть представлена в виде:
 .
.
Обратная зависимость N=ƒ(Δωк) находится из уравнения:
С уменьшением частотного рассогласования двоичный код Nк увеличивается. При достижении ƒос значения ƒд значение двоичного кода Nк становится равно или больше значения двоичного кода NГ, соответствующего ошибке по угловой скорости, равной ΔωГ, и на выходе схемы сравнения 18 формируется сигнал логической "1". Значение двоичного кода NГ находится путем подстановки в уравнение (4) вместо переменной Δωк требуемого значения ΔωГ:
 ,
,
а с учетом того, что  получим:
получим:
 .
.
По переднему фронту единичного сигнала с выхода схемы сравнения 18, поступающего на синхровход D-триггера 16, на вход D которого всегда подается сигнал уровня "1", происходит установка выхода D-триггера 16 в состояние "1". По этому сигналу происходит переключение цифрового ключа 14 на второй вход. С выхода цифрового ключа 14 через смеситель 4 на первый вход частотно-фазового дискриминатора начинает поступать сигнал ƒд=ƒоп-ΔƒГ. Частотно-фазовый дискриминатор 5 переходит в режим фазового сравнения импульсов частот ƒд и ƒос, и на его выходе появляются импульсы, период следования которых равен периоду следования импульсов частоты ƒд, а длительность пропорциональна величине фазового рассогласования частотных сигналов ƒд и ƒос. Сигнал γ с выхода частотно-фазового дискриминатора 5, в режиме фазового сравнения пропорциональный сигналу фазовой ошибки электропривода, поступает на вход блока коррекции 6, на выходе которого формируется сигнал управления статическим преобразователем 7, определяемый передаточной функцией блока коррекции 6. Передаточная функция блока коррекции 6 обычно выбирается так, чтобы обеспечить минимальное время переходного процесса в режиме синхронизации электропривода. Происходит синхронизация электропривода на частоте ƒд.
Блок определения фазового рассогласования 8 позволяет непрерывно определять угловое рассогласование Δαфн по мере поступления импульсов задающей частоты ƒоп и импульсов частоты обратной связи.
При наличии угловой ошибки, определяемой с помощью блока определения фазового рассогласования 8, на его третьем выходе формируется сигнал логической единицы, разрешающей процесс предварительного фазирования. Происходит фазирование электропривода (участок 2-3 фазовой траектории) с постоянной скоростью доворота вала, равной  . При устранении угловой ошибки на третьем выходе блока определения фазового рассогласования 8 формируется сигнал логического нуля, что приводит к сбросу D-триггера 16 и установке цифрового ключа 14 в начальное положение. На первый вход частотно-фазового дискриминатора 5 начинают приходить импульсы ƒоп с первого выхода блока задания частоты 3. Частотно-фазовый дискриминатор 5 производит сравнение частот импульсных последовательностей ƒоп и ƒос и выдает сигнал γ высокого уровня на разгон электродвигателя 1 с максимальным ускорением, так как ƒоп>ƒос. Частота ƒос на выходе блока импульсных датчиков 2 при этом возрастает. Блок определения частотного рассогласования 19 продолжает определять разницу частот ƒоп и ƒос в виде двоичного кода Nк. При возрастании частоты ƒос разница частот Δƒ уменьшается, а двоичный код Nк возрастает и при уменьшении ошибки по угловой скорости Δω до значения Δωг, значение Nк становиться равно или больше значения
. При устранении угловой ошибки на третьем выходе блока определения фазового рассогласования 8 формируется сигнал логического нуля, что приводит к сбросу D-триггера 16 и установке цифрового ключа 14 в начальное положение. На первый вход частотно-фазового дискриминатора 5 начинают приходить импульсы ƒоп с первого выхода блока задания частоты 3. Частотно-фазовый дискриминатор 5 производит сравнение частот импульсных последовательностей ƒоп и ƒос и выдает сигнал γ высокого уровня на разгон электродвигателя 1 с максимальным ускорением, так как ƒоп>ƒос. Частота ƒос на выходе блока импульсных датчиков 2 при этом возрастает. Блок определения частотного рассогласования 19 продолжает определять разницу частот ƒоп и ƒос в виде двоичного кода Nк. При возрастании частоты ƒос разница частот Δƒ уменьшается, а двоичный код Nк возрастает и при уменьшении ошибки по угловой скорости Δω до значения Δωг, значение Nк становиться равно или больше значения
 ,
,
что приводит к появлению на выходе схемы сравнения 17 сигнала логической "1". Сигнал с выхода схемы сравнения 17 поступает на вход схемы И 15 и разрешает прохождение импульсов с формирователя дополнительных импульсов 9 (разрешается работа части схемы, отвечающей за фазирование с пошаговым доворотом вала). В момент времени, когда частота ƒос сравнивается с частотой ƒоп, частотно-фазовый дискриминатор 5 переходит в режим фазового сравнения импульсов частот ƒоп и ƒос, и на его выходе появляются импульсы, период следования которых равен периоду следования импульсов частоты ƒоп, а длительность пропорциональна величине фазового рассогласования частотных сигналов ƒоп и ƒос. Сигнал γ с выхода частотно-фазового дискриминатора 5, в режиме фазового сравнения пропорциональный сигналу фазовой ошибки электропривода, поступает на вход блока коррекции 6, на выходе которого формируется сигнал управления статическим преобразователем 7, определяемый передаточной функцией блока коррекции 6. Передаточная функция блока коррекции 6 обычно выбирается так, чтобы обеспечить минимальное время переходного процесса в режиме синхронизации электропривода.
При наличии остаточной угловой ошибки после синхронизации на частоте ƒоп, которая может возникнуть в результате нестабильности момента нагрузки, а также других возмущающих факторов и определяется с помощью блока определения фазового рассогласования 8, на его третьем выходе формируется сигнал логической единицы, а в зависимости от знака угловой ошибки формируется сигнал логической единицы на первом или втором выходе блока определения фазового рассогласования 8. Высокие уровни сигнала на втором и третьем выходах блока определения фазового рассогласования 8 разрешают прохождение дополнительных импульсов с выхода формирователя дополнительных импульсов 9 через блок суммирования импульсов 13 на первый вход частотно-фазового дискриминатора 5. Высокие уровни сигналов на первом и третьем выходах блока определения фазового рассогласования 8 разрешают прохождение дополнительных импульсов через блок суммирования импульсов 12 на второй вход дискриминатора 7. При этом в зависимости от знака угловой ошибки осуществляется дополнительный разгон или торможение электродвигателя 1.
Дополнительные импульсы на выходе формирователя дополнительных импульсов 9 формируются после синхронизации электропривода при уменьшении значения фазовой ошибки на выходе частотно-фазового дискриминатора 5 до требуемой величины.
После отработки начальной угловой ошибки электропривода на третьем выходе блока определения фазового рассогласования 8 появляется низкий уровень напряжения, запрещающий прохождение дополнительных импульсов через блоки суммирования импульсов 12 и 13 на входы частотно-фазового дискриминатора 5. При этом электропривод переходит в режим синхронно-синфазного вращения.
Блок определения частотного рассогласования 19 работает следующим образом. При разгоне электропривода с максимальным ускорением при пересечении изображающей точкой значений  на фазовом портрете разгона электропривода возникает состояние, при котором в промежутке между поступлением на вход двух импульсов частоты обратной связи на вход подаются два импульса опорной частоты. Первый импульс устанавливает прямой выход фазового RS-триггера 20 в состояние «1» (высокий уровень напряжения), подготовив D-триггера 21 к включению при прохождении второго импульса. Второй импульс устанавливает прямой выход D-триггера 21 в состояние «1». Импульс с прямого выхода D-триггера 21 поступает на вход одновибратора 22, который формирует на выходе импульс требуемой длительности, обеспечивающей надежную работу частотно-фазового компаратора. Импульс с выхода одновибратора 22 одновременно поступает на R вход D-триггера 21 (отключая его), на R вход счетчика импульсов 23 (сбрасывая его) и на синхровход регистра 25, который запоминает двоичный код N с выходов счетчика импульсов 23. Счетчик импульсов 23 считает количество импульсов, следующих с частотой ƒвчг, высокочастотного генератора 24 за время Δt между импульсами с выхода одновибратора 22, которое соответствует изменению фазовой ошибки на величину Δα=φ0. Таким образом, значение двоичного кода Nк на выходе блока определения частотного рассогласования 19 пропорционально времени Δt изменения фазовой ошибки на величину Δα=φ0 и равно:
на фазовом портрете разгона электропривода возникает состояние, при котором в промежутке между поступлением на вход двух импульсов частоты обратной связи на вход подаются два импульса опорной частоты. Первый импульс устанавливает прямой выход фазового RS-триггера 20 в состояние «1» (высокий уровень напряжения), подготовив D-триггера 21 к включению при прохождении второго импульса. Второй импульс устанавливает прямой выход D-триггера 21 в состояние «1». Импульс с прямого выхода D-триггера 21 поступает на вход одновибратора 22, который формирует на выходе импульс требуемой длительности, обеспечивающей надежную работу частотно-фазового компаратора. Импульс с выхода одновибратора 22 одновременно поступает на R вход D-триггера 21 (отключая его), на R вход счетчика импульсов 23 (сбрасывая его) и на синхровход регистра 25, который запоминает двоичный код N с выходов счетчика импульсов 23. Счетчик импульсов 23 считает количество импульсов, следующих с частотой ƒвчг, высокочастотного генератора 24 за время Δt между импульсами с выхода одновибратора 22, которое соответствует изменению фазовой ошибки на величину Δα=φ0. Таким образом, значение двоичного кода Nк на выходе блока определения частотного рассогласования 19 пропорционально времени Δt изменения фазовой ошибки на величину Δα=φ0 и равно:
 .
.
Работа электропривода (при отработке отрицательного фазового рассогласования) поясняется фазовым портретом (фиг.3). На участке 1-2 электропривод разгоняется с максимальным (постоянным) ускорением. В момент времени б, когда значение двоичного кода Nк на выходе блока определения частотного рассогласования 19 становится больше расчетного значения NГ, электропривод переходит в режим синхронизации на угловой скорости, пропорциональной дополнительной частоте ƒд (пропорциональный режим работы). Далее на участке 2-3 происходит процесс фазирования с постоянной скоростью доворота вала. В момент времени 3, когда значение фазовой ошибки Δα становится равно нулю, начинается дальнейший разгон электропривода. В случае отсутствия колебаний момента нагрузки и других возмущающих факторов в момент времени 4 при прохождении двух импульсов частоты ƒос между двумя импульсами частоты ƒоп происходит полная синхронизация электропривода с переходом в синхронно-синфазный режим. В случае присутствия колебаний момента нагрузки и других возмущающих факторов происходит отклонение от расчетной траектории и синхронизация электропривода происходит на участке 5-6, после чего на участке 6-7 происходит отработка небольшой фазовой ошибки пошаговым способом, реализованным в прототипе, с последующей полной синхронизацией электропривода на участке 7-8 с переходом в синхронно-синфазный режим.
Введение в синхронно-синфазный электропривод двух схем сравнения, схемы И, блока определения частотного рассогласования, цифрового ключа и D-триггера позволяет значительно повысить быстродействие электропривода при переходе в синхронно-синфазный режим работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2010 |
|
RU2422978C1 |
| СТАБИЛИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД | 2016 |
|
RU2621288C1 |
| СПОСОБ ФАЗИРОВАНИЯ ВРАЩАЮЩЕГОСЯ ВАЛА ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2649307C1 |
| СТАБИЛИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2462809C1 |
| СТАБИЛИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2467465C1 |
| ЧАСТОТНО-ФАЗОВЫЙ ДИСКРИМИНАТОР | 2010 |
|
RU2428785C1 |
| Частотно-фазовый дискриминатор | 2018 |
|
RU2695986C1 |
| Электропривод | 1987 |
|
SU1434532A1 |
| Стабилизированный электропривод | 1989 |
|
SU1624649A1 |
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2310971C1 |

Изобретение относится к электротехнике и может быть использовано в системах передачи и воспроизведения информации, например в приводе устройств видеозаписи. Технический результат заключается в повышении быстродействия электропривода при переходе в синхронно-синфазный режим работы. Для этого заявленное устройство содержит электродвигатель с установленным на его валу блоком импульсных датчиков, частотно-фазовый дискриминатор, блок коррекции, статический преобразователь, блок определения фазового рассогласования, формирователь дополнительных импульсов, смеситель, блок задания частоты, новое - две схемы сравнения, схема И, цифровой ключ, блок определения частотного рассогласования и D-триггер, введенный в устройство блок определения частотного рассогласования выполнен в виде высокочастотного генератора импульсов, счетчика импульсов, одновибратора, D-триггера, регистра и RS-триггера, S вход которого объединен с синхровходом D-триггера, R вход является вторым входом блока определения частотного рассогласования, прямой выход подключен к D входу D-триггера, выход которого через одновибратор подключен одновременно к своему R входу, к R входу счетчика импульсов и к синхровходу регистра, выходы которого являются выходами блока определения частотного рассогласования, а D входы подключены к выходам счетчика импульсов, синхровход которого является выходом высокочастотного генератора, что позволяет, согласно изобретению, проводить фазирование до момента достижения заданной частоты вращения на дополнительной угловой скорости  , что в свою очередь приводит к уменьшению максимального времени фазирования электропривода в два раза. 5 ил.
, что в свою очередь приводит к уменьшению максимального времени фазирования электропривода в два раза. 5 ил.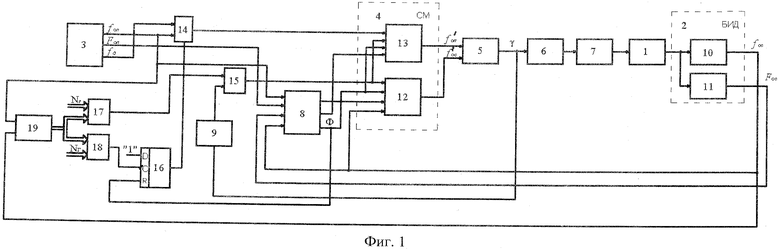
Синхронно-синфазный электропривод, содержащий электродвигатель с установленным на его валу блоком импульсных датчиков, последовательно соединенные частотно-фазовый дискриминатор, блок коррекции, статический преобразователь, выходом подключенный к якорной обмотке электродвигателя, блок определения фазового рассогласования, формирователь дополнительных импульсов, смеситель, блок задания частоты, первый и второй выходы которого соединены соответственно с первым и вторым входами блока определения фазового рассогласования, первый выход блока импульсных датчиков подключен к четвертому входу блока определения фазового рассогласования и к шестому входу смесителя, второй, четвертый и пятый входы которого подключены соответственно ко второму, третьему и первому выходам блока определения фазового рассогласования, третий вход которого подключен ко второму выходу блока импульсных датчиков, первый и второй выходы смесителя подключены соответственно к первому и второму входам частотно-фазового дискриминатора, выход которого подключен к входу формирователя дополнительных импульсов, при этом блок импульсных датчиков выполнен в виде импульсного датчика частоты и импульсного датчика положения ротора, объединенные входы которых являются входом блока импульсных датчиков, выход импульсного датчика частоты является первым выходом блока импульсных датчиков, а выход импульсного датчика положения ротора является вторым выходом блока импульсных датчиков, кроме того, смеситель выполнен в виде двух блоков суммирования импульсов, при этом третий и четвертый входы первого блока суммирования импульсов являются соответственно пятым и шестым входами смесителя, первый и четвертый входы второго блока суммирования импульсов являются соответственно первым и вторым входами смесителя, а первый и второй входы первого блока суммирования импульсов, объединенные соответственно со вторым и третьим входами второго блока суммирования импульсов, являются соответственно третьим и четвертым входами смесителя, выходы первого и второго блоков суммирования импульсов являются соответственно вторым и первым выходами смесителя, отличающийся тем, что в устройство введены две схемы сравнения, схема И, цифровой ключ, блок определения частотного рассогласования и D-триггер, R-вход которого подключен к третьему выходу блока определения фазового рассогласования, синхровход подключен к выходу второй схемы сравнения, а выход подключен к управляющему входу цифрового ключа, первый вход которого подключен к третьему выходу блока задания частоты, второй вход, объединенный с первым входом блока определения частотного рассогласования, подключен к первому выходу блока задания частоты, а выход подключен к первому входу смесителя, третий вход которого подключен к выходу схемы И, второй вход которой подключен к выходу формирователя дополнительных импульсов, а первый вход подключен к выходу первой схемы сравнения, входы которой объединенные с входами второй схемы сравнения, подключены к выходам блока определения частотного рассогласования, второй вход которого подключен к первому выходу блока импульсных датчиков, блок определения частотного рассогласования выполнен в виде высокочастотного генератора импульсов, счетчика импульсов, одновибратора, D-триггера, регистра и RS-триггера, S-вход которого объединен с синхровходом D-триггера и является первым входом блока определения частотного рассогласования, R-вход является вторым входом блока определения частотного рассогласования, а прямой выход подключен к D-входу D-триггера, выход которого через одновибратор подключен одновременно к своему R-входу к R-входу счетчика импульсов и к синхровходу регистра, выходы которого являются выходами блока определения частотного рассогласования, а D-входы подключены к выходам счетчика импульсов, синхровход которого является выходом высокочастотного генератора импульсов.
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2010 |
|
RU2422978C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2004 |
|
RU2291552C2 |
| ИМПУЛЬСНАЯ ЧАСТОТНО-ФАЗОВАЯ СИСТЕМА РЕГУЛИРОВАНИЯ СКОРОСТИ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2007 |
|
RU2342762C1 |
| Электропривод с частотно-токовым управлением | 1988 |
|
SU1515325A1 |
| JP 3655277 B2, 02.06.2005. | |||

