Изобретение относится к электротехнике, а именно к устройствам автоматического фазирования синхронизированных электроприводов с фазовой автоподстройкой частоты вращения, и может быть использовано в системах передачи и воспроизведения информации, например в приводе устройств видеозаписи.
Известно устройство для стабилизации скорости и фазы вращения ротора электродвигателя постоянного тока (а.с. СССР №921012, МКИ4 H02P 5/06, 1982 г.), содержащее электродвигатель, соединенный с питающей сетью через статический преобразователь, управляющий вход которого через корректирующее звено соединен с выходом импульсного частотно-фазового дискриминатора, первый вход которого соединен с выходом генератора опорной частоты и входом генератора низкой частоты, а второй вход подключен к выходу схемы ИЛИ, первый вход которой соединен с выходом схемы И, а второй вход объединен с первым входом блока временной привязки и через звено первой задержки соединен с выходом датчика скорости, второй вход блока временной привязки подключен к выходу датчика низкой частоты, а его выход - к входу звена второй задержки и второму входу элемента сравнения, выход звена второй задержки соединен с первым входом схемы И и синхровходом элемента памяти, выход которого подключен ко второму входу схемы И, а управляющий вход - к выходу элемента сравнения, первый вход элемента сравнения подключен к выходу генератора низкой частоты, датчики скорости и низкой частоты расположены на валу электродвигателя.
Недостатком этого устройства является низкое быстродействие, обусловленное следующими факторами:
1) Отработка фазового рассогласования ведется только в режиме торможения, вследствие чего время отработки малых фазовых рассогласований может быть велико.
2) При отработке начальной фазовой ошибки возможно накопление значительной скоростной ошибки, приводящее к повторению цикла фазирования и, следовательно, к снижению быстродействия привода.
Наиболее близким техническим решением к заявляемому устройству является синхронно-синфазный электропривод (а.с. СССР №1591172, МКИ5 H02P 5/50, 5/06, 1990 г.), содержащий электродвигатель с импульсными датчиками частоты и положения ротора, установленными на его валу, последовательно соединенные частотно-фазовый дискриминатор, блок коррекции, статический преобразователь, выходом подключенный к якорной обмотке электродвигателя, а также блок определения фазового рассогласования, формирователь дополнительных импульсов, два блока суммирования импульсов, блок наличия частоты, частотно-задающий блок, первый выход которого подключен к первому входу блока определения фазового рассогласования и первому входу второго блока суммирования импульсов, а второй выход соединен со вторым входом блока определения фазового рассогласования, третий вход которого подключен к выходу импульсного датчика положения ротора, третий выход блока определения фазового рассогласования подключен к четвертому входу первого блока суммирования импульсов, третий вход которого подключен к первому выходу блока определения фазового рассогласования, а второй вход подключен к выходу формирователя дополнительных импульсов, первый вход которого подключен к выходу импульсного датчика положения ротора, а второй вход подключен к выходу блока наличия частоты, вход которого подключен к выходу частотно-фазового дискриминатора, второй вход которого подключен к выходу первого блока суммирования импульсов, а первый вход подключен к выходу второго блока суммирования импульсов, второй вход которого подключен к выходу формирователя дополнительных импульсов, а третий и четвертый входы подключены соответственно к первому и второму выходам блока определения фазового рассогласования.
Недостатками этого устройства являются:
1) Низкое быстродействие электропривода в области низких частот вращения, обусловленное увеличением периода следования дополнительных импульсов, в качестве которых используется частота Fос (зависящая от задающей частоты fоп), и, следовательно, увеличением продолжительности цикла фазирования.
2) В области высоких частот вращения из-за частого прохождения дополнительных импульсов происходит накопление скоростной ошибки в каждом цикле фазирования, что приводит к невозможности синхронизации электропривода при достижении Δαф=0 и, следовательно, снижению быстродействия электропривода из-за необходимости повторения процесса фазирования.
3) Низкое быстродействие блока определения фазового рассогласования (определение Δαф, осуществляется 1 раз за оборот вала электродвигателя).
Задачей изобретения является повышение быстродействия синхронно-синфазного электропривода в режиме фазирования.
Поставленная задача решена за счет того, что в известном синхронно-синфазном электроприводе, содержащем электродвигатель с установленным на его валу блоком импульсных датчиков, последовательно соединенные частотно-фазовый дискриминатор, блок коррекции, статический преобразователь, выходом подключенный к якорной обмотке электродвигателя, блок определения фазового рассогласования, формирователь дополнительных импульсов, смеситель, блок задания частоты, первый и второй выходы которого соединены соответственно с первым и вторым входами блока определения фазового рассогласования, первый выход блока импульсных датчиков подключен к шестому входу смесителя, первый вход которого подключен к первому выходу блока задания частоты, третий вход - к выходу формирователя дополнительных импульсов, а второй, четвертый и пятый входы - соответственно ко второму, третьему и первому выходам блока определения фазового рассогласования, третий вход которого подключен ко второму выходу блока импульсных датчиков, первый и второй выходы смесителя подключены соответственно к первому и второму входам частотно-фазового дискриминатора, при этом блок импульсных датчиков выполнен в виде импульсного датчика частоты и импульсного датчика положения ротора, объединенные входы которых являются входом блока импульсных датчиков, выход импульсного датчика частоты является первым выходом блока импульсных датчиков, а выход импульсного датчика положения ротора является вторым выходом блока импульсных датчиков, кроме того, смеситель выполнен в виде двух блоков суммирования импульсов, при этом третий и четвертый входы первого блока суммирования импульсов являются соответственно пятым и шестым входами смесителя, первый и четвертый входы второго блока суммирования импульсов являются соответственно первым и вторым входами смесителя, а первый и второй входы первого блока суммирования импульсов, объединенные соответственно со вторым и третьим входами второго блока суммирования импульсов, являются соответственно третьим и четвертым входами смесителя, выходы первого и второго блоков суммирования импульсов являются соответственно вторым и первым выходами смесителя, согласно заявляемому техническому решению блок определения фазового рассогласования выполнен в виде первого счетчика импульсов, тактовый вход, объединенный с первым входом схемы разделения совпадающих импульсов, и вход сброса которого являются соответственно первым и вторым входами блока определения фазового рассогласования, а выходы подключены к информационным входам второго счетчика импульсов, при этом тактовый вход второго счетчика импульсов является третьим входом блока определения фазового рассогласования, а входы суммирования и вычитания импульсов подключены соответственно к первому и второму выходам схемы разделения совпадающих импульсов, второй вход которой является четвертым входом блока определения фазового рассогласования, выходы второго счетчика импульсов подключены к входам первого и второго блоков выделения кода, при этом первый и второй выходы первого блока выделения кода являются соответственно первым и вторым выходами блока определения фазового рассогласования, а выход второго блока выделения кода является третьим выходом блока определения фазового рассогласования, формирователь дополнительных импульсов выполнен в виде последовательно соединенных нелинейного элемента с зоной нечувствительности, вход которого является входом формирователя дополнительных импульсов, и одновибратора, выход которого является выходом формирователя дополнительных импульсов, кроме того, первый выход блока импульсных датчиков подключен к четвертому входу блока определения фазового рассогласования, выход частотно-фазового дискриминатора подключен к входу формирователя дополнительных импульсов.
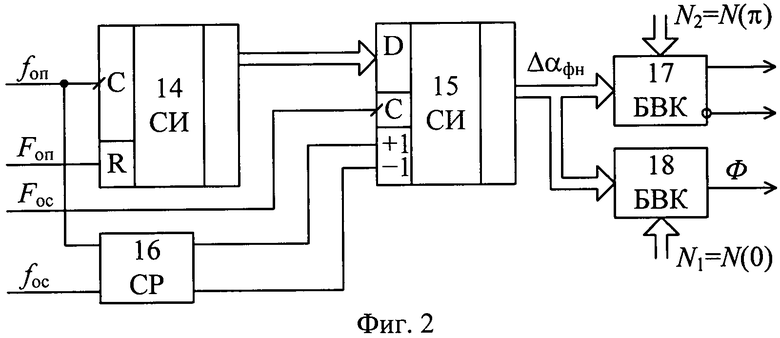
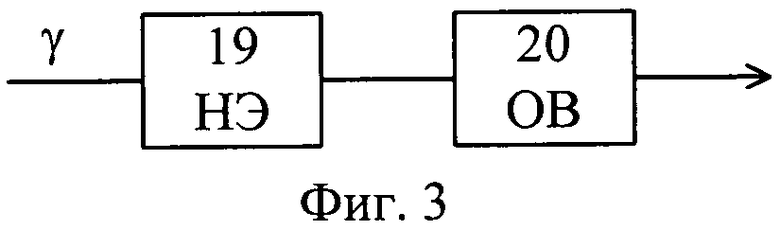
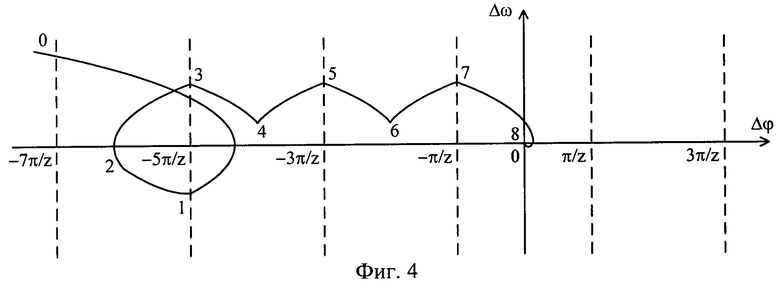
Сущность технического решения пояснена чертежами, где на фиг.1 приведена функциональная электрическая схема предлагаемого устройства; на фиг.2 приведена функциональная схема блока определения фазового рассогласования предлагаемого устройства; на фиг.3 приведена функциональная схема формирователя дополнительных импульсов предлагаемого устройства; на фиг.4 приведен фазовый портрет работы предлагаемого устройства.
Синхронно-синфазный электропривод содержит электродвигатель 1, блок импульсных датчиков 2, блок задания частоты 3, смеситель 4, частотно-фазовый дискриминатор 5, блок коррекции 6, статический преобразователь 7, блок определения фазового рассогласования 8, формирователь дополнительных импульсов 9.
На валу электродвигателя 1 установлен блок импульсных датчиков 2. Первый выход блока импульсных датчиков 2 подключен к четвертому входу блока определения фазового рассогласования 8 и к шестому входу смесителя 4, первый вход которого подключен к первому выходу блока задания частоты 3, второй, четвертый и пятый входы подключены соответственно ко второму, третьему и первому выходам блока определения фазового рассогласования 8, а третий вход подключен к выходу формирователя дополнительных импульсов 9; второй выход блока импульсных датчиков 2 подключен к третьему входу блока определения фазового рассогласования 8, первый и второй входы которого подключены соответственно к первому и второму выходам блока задания частоты 3. Первый и второй выходы смесителя 4 подключены соответственно к первому и второму входам частотно-фазового дискриминатора 5, выход которого подключен к входу формирователя дополнительных импульсов 9 и к входу блока коррекции 6. Выход блока коррекции 6 подключен к входу статического преобразователя 7, выходом подключенного к якорной обмотке электродвигателя 1.
Блок импульсных датчиков 2 выполнен в виде импульсного датчика частоты 10 и импульсного датчика положения ротора 11. Вход блока импульсных датчиков 2 является входом импульсного датчика частоты 10 и входом импульсного датчика положения ротора 11. Выходы импульсного датчика частоты 10 и импульсного датчика положения ротора 11 являются соответственно первым и вторым выходами блока импульсных датчиков 2.
Смеситель 4 выполнен в виде блоков суммирования импульсов 12 и 13. Третий и четвертый входы блока суммирования импульсов 12 являются соответственно пятым и шестым входами смесителя 4. Первый и четвертый входы блока суммирования импульсов 13 являются соответственно первым и вторым входами смесителя 4. Первый и второй входы блока суммирования импульсов 12, объединенные соответственно со вторым и третьим входами блока суммирования импульсов 13, являются соответственно третьим и четвертым входами смесителя 4. Выходы блоков суммирования импульсов 12 и 13 являются соответственно вторым и первым выходами смесителя 4.
Блок определения фазового рассогласования 8 выполнен в виде счетчиков импульсов 14 и 15, схемы разделения совпадающих импульсов 16 и блоков выделения кода 17 и 18. Тактовый вход C, объединенный с первым входом схемы разделения совпадающих импульсов 16, и вход сброса R счетчика импульсов 14 являются соответственно первым и вторым входами блока определения фазового рассогласования 8. Выходы счетчика импульсов 14 подключены к информационным D-входам счетчика импульсов 15, тактовый вход C которого является третьим входом блока определения фазового рассогласования 8. Входы суммирования (+1) и вычитания (-1) импульсов счетчика импульсов 15 подключены соответственно к первому и второму выходам схемы разделения совпадающих импульсов 16, второй вход которой является четвертым входом блока определения фазового рассогласования 8. Выходы счетчика импульсов 15 подключены к входам блоков выделения кода 17 и 18. Первый и второй выходы блока выделения кода 17 являются соответственно первым и вторым выходами блока определения фазового рассогласования 8, третий выход которого является выходом блока выделения кода 18.
Формирователь дополнительных импульсов 9 выполнен в виде последовательно соединенных нелинейного элемента с зоной нечувствительности 19, вход которого является входом формирователя дополнительных импульсов 9, и одновибратора 20, выход которого является выходом формирователя дополнительных импульсов 9.
Синхронно-синфазный электропривод работает следующим образом. Блок задания частоты 3 служит для формирования частотного сигнала fоп, определяющего частоту вращения электродвигателя 1 в требуемом диапазоне частот вращения, и импульсов угловой привязки Fоп, обеспечивающих синфазный режим работы. Электродвигатель 1 является исполнительным элементом электропривода и обеспечивает вращение выходного вала с требуемой угловой скоростью.
При разгоне электродвигателя 1 до синхронной частоты вращения, определяемой сигналом fоп на первом выходе блока задания частоты 3, на первый вход частотно-фазового дискриминатора 5 через смеситель 4 поступает сигнал fоп с первого выхода блока задания частоты 3. На второй вход частотно-фазового дискриминатора 5 через смеситель 4 поступают импульсы частоты fос с выхода блока импульсных датчиков 2, предназначенного для получения сигнала обратной связи по частоте вращения fос и формирования сигнала начала отсчета углового положения ротора Fос с целью обеспечения синфазного режима работы электропривода. Частота следования импульсов fос пропорциональна частоте вращения электродвигателя 1. Частотно-фазовый дискриминатор 5 проводит сравнение частот импульсных последовательностей fоп и fос и выдает сигнал γ высокого уровня на разгон электродвигателя, так как fоп>fос.
Управляющий сигнал γ с выхода частотно-фазового дискриминатора 5 через блок коррекции 6, предназначенный для формирования управляющего сигнала с целью обеспечения устойчивой работы электропривода, и статический преобразователь 7, обеспечивающий усиление управляющего сигнала и его преобразование в требуемый ток в обмотках электродвигателя 1, поступает в обмотки электродвигателя 1, обеспечивая его разгон с максимальным ускорением. При этом частота fос на выходе блока импульсных датчиков 2 возрастает до тех пор, пока не сравняется с частотой fоп. В этот момент частотно-фазовый дискриминатор 5 переходит в режим фазового сравнения импульсов частот fоп и fос, и на его выходе появляются импульсы, период следования которых равен периоду следования импульсов частоты fоп, а длительность пропорциональна величине фазового рассогласования частотных сигналов fоп и fос. Сигнал γ с выхода частотно-фазового дискриминатора 5, в режиме фазового сравнения пропорциональный сигналу фазовой ошибки электропривода, поступает на вход блока коррекции 6, на выходе которого формируется сигнал управления статическим преобразователем 7, определяемый передаточной функцией блока коррекции 6. Передаточная функция блока коррекции 6 обычно выбирается так, чтобы обеспечить минимальное время переходного процесса в режиме синхронизации электропривода.
При наличии угловой ошибки, определяемой с помощью блока определения фазового рассогласования 8, на его третьем выходе формируется сигнал логической единицы, а в зависимости от знака угловой ошибки формируется сигнал логической единицы на первом или втором выходе блока определения фазового рассогласования 8. Высокие уровни сигнала на втором и третьем выходах блока определения фазового рассогласования 8 разрешают прохождение дополнительных импульсов с выхода формирователя дополнительных импульсов 9 через блок суммирования импульсов 13 на первый вход частотно-фазового дискриминатора 5. Высокие уровни сигналов на первом и третьем выходах блока определения фазового рассогласования 8 разрешают прохождение дополнительных импульсов через блок суммирования импульсов 12 на второй вход дискриминатора 7. При этом для сокращения времени фазирования в зависимости от знака угловой ошибки осуществляется дополнительный разгон или торможение электродвигателя 1.
Дополнительные импульсы на выходе формирователя дополнительных импульсов 9 формируются после синхронизации электропривода при уменьшении значения фазовой ошибки на выходе частотно-фазового дискриминатора 5 до величины, задаваемой шириной зоны нечувствительности нелинейного элемента 19, входящего в состав формирователя дополнительных импульсов 9. При этом с выхода нелинейного элемента 19 поступает сигнал на вход одновибратора 20, который формирует дополнительный импульс, проходящий в зависимости от знака угловой ошибки в канал импульсов частоты fоп (на первый вход частотно-фазового дискриминатора 5), осуществляя дополнительный разгон электродвигателя 1, или в канал импульсов частоты fос (на второй вход частотно-фазового дискриминатора 5), осуществляя дополнительное торможение электродвигателя 1. В результате (по сравнению с прототипом) устраняется возможность накопления скоростной ошибки в режиме фазирования, что позволяет сократить время фазирования.
После отработки начальной угловой ошибки электропривода на третьем выходе блока определения фазового рассогласования 8 появляется низкий уровень напряжения, запрещающий прохождение дополнительных импульсов через блоки суммирования импульсов 12 и 13 на входы частотно-фазового дискриминатора 5. При этом электропривод переходит в режим синхронно-синфазного вращения.
В режимах разгона или торможения привода частотно-фазовый дискриминатор 5 находится в режиме насыщения, и на вход нелинейного элемента 19 поступает высокий (низкий) уровень напряжения, что запрещает формирование дополнительных импульсов. При этом на входы частотно-фазового дискриминатора 5 через блоки суммирования импульсов 12 и 13 поступают только импульсы частот fос и fоп, определяя разгон (торможение) электродвигателя 1 до синхронной скорости. Отсутствие дополнительных импульсов в каналах задания и обратной связи в режимах разгона и торможения привода приводит к исключению ложных переключений частотно-фазового дискриминатора 5 в режим фазового сравнения, снижающих быстродействие привода. При этом разгон (торможение) привода до синхронной скорости осуществляется с максимальным ускорением.
Блок определения фазового рассогласования 8 работает следующим образом. Счетчик импульсов 14 сбрасывается в ноль при приходе импульса угловой привязки Fоп на вход сброса R. Далее при приходе импульса частоты fоп на тактовый вход C значение двоичного кода на выходе счетчика импульсов 14 увеличивается на единицу. Двоичный код с выходов счетчика импульсов 14 поступает на информационные D-входы счетчика импульсов 15 и записывается в него при приходе импульса начала отсчета углового положения ротора Fос. Далее при приходе импульса частоты fоп на вход суммирования импульсов (+1) записанный в счетчик импульсов 15 двоичный код увеличивается на единицу, а при приходе импульса частоты fос на вход вычитания импульсов (-1) - уменьшается на единицу. При совпадении во времени импульсов частот fоп и fос схема разделения совпадающих импульсов 16 формирует 2 разделенных во времени импульса и подает их на входы суммирования и вычитания импульсов счетчика импульсов 15.
Двоичный код фазового рассогласования Δαфн с выходов счетчика импульсов 15 поступает на входы блока выделения кода 18, в котором сравнивается с кодом N1, соответствующим отсутствию ошибки по углу (синфазному режиму работы). При равенстве кодов на выходе блока выделения кода 18 формируется сигнал логического нуля, а при неравенстве кодов - сигнал логической единицы. Блок выделения кода 17 сравнивает двоичный код с выходов счетчика импульсов 15 с кодом N2, соответствующим фазовому рассогласованию, равному π. При Δαфн>π на первом выходе блока выделения кода 17 формируется сигнал логической единицы, разрешающий прохождение импульсов через блок суммирования импульсов 12 в канал импульсов частоты fос, а при Δαфн<π сигнал логической единицы формируется на втором выходе блока выделения кода 17, разрешая прохождение импульсов через блок суммирования импульсов 13 в канал импульсов частоты fоп.
Работа электропривода (при отработке отрицательного фазового рассогласования) поясняется фазовым портретом. На участке 0-1 электропривод разгоняется с максимальным (постоянным) ускорением. В момент времени 1 при прохождении двух импульсов частоты fос между двумя импульсами частоты fоп на линии переключения  (z - количество меток импульсного датчика частоты) электропривод переходит в режим синхронизации (пропорциональный режим работы). В момент времени 2, когда значение у на выходе частотно-фазового дискриминатора 5 попадает в диапазон значений, определяемых зоной нечувствительности нелинейного элемента 19, формируется дополнительный импульс, поступающий в канал обратной связи с выхода формирователя дополнительных импульсов 9, и электропривод переходит в режим торможения. На участке 3-4 электропривод работает в пропорциональном режиме. В момент времени 4 значение фазовой ошибки попадает в диапазон значений зоны нечувствительности нелинейного элемента 19, с выхода формирователя дополнительных импульсов 9 поступает дополнительный импульс в канал обратной связи и электропривод повторно переходит в режим торможения. Аналогично на участке 5-6 электропривод работает в пропорциональном режиме, на участке 6-7 - в режиме торможения, на участке 7-8 происходит полная синхронизация электропривода с переходом в синхронно-синфазный режим.
(z - количество меток импульсного датчика частоты) электропривод переходит в режим синхронизации (пропорциональный режим работы). В момент времени 2, когда значение у на выходе частотно-фазового дискриминатора 5 попадает в диапазон значений, определяемых зоной нечувствительности нелинейного элемента 19, формируется дополнительный импульс, поступающий в канал обратной связи с выхода формирователя дополнительных импульсов 9, и электропривод переходит в режим торможения. На участке 3-4 электропривод работает в пропорциональном режиме. В момент времени 4 значение фазовой ошибки попадает в диапазон значений зоны нечувствительности нелинейного элемента 19, с выхода формирователя дополнительных импульсов 9 поступает дополнительный импульс в канал обратной связи и электропривод повторно переходит в режим торможения. Аналогично на участке 5-6 электропривод работает в пропорциональном режиме, на участке 6-7 - в режиме торможения, на участке 7-8 происходит полная синхронизация электропривода с переходом в синхронно-синфазный режим.
Таким образом, после каждого дополнительного импульса, поступившего в канал обратной связи, происходит полная синхронизация электропривода, что позволяет устранить накопление скоростной ошибки в режиме фазирования. Фазирование может осуществляться как при дополнительном разгоне, так и при торможении электропривода, в результате время фазирования значительно сокращается, особенно при отработке малых угловых рассогласований. При начальном значении угловой ошибки  фазирование осуществляется за n тактов.
фазирование осуществляется за n тактов.
Таким образом, предлагаемое техническое решение позволяет повысить быстродействие синхронно-синфазного электропривода в режиме фазирования.
Введение в формирователь дополнительных импульсов нелинейного элемента с зоной нечувствительности позволяет в режиме фазирования осуществлять перевод электропривода в пропорциональный режим работы в момент уменьшения значения фазовой ошибки на выходе частотно-фазового дискриминатора до величины, задаваемой шириной зоны нечувствительности нелинейного элемента (независимо от значения частоты Fос), что позволяет повысить быстродействие электропривода в режиме фазирования особенно в области низких частот вращения за счет уменьшения продолжительности цикла фазирования.
Введение в формирователь дополнительных импульсов нелинейного элемента с зоной нечувствительности позволяет в области высоких частот вращения избежать накопления скоростной ошибки в циклах фазирования (и следовательно, уменьшить время фазирования и повысить быстродействие электропривода), так как каждый последующий цикл фазирования начинается при практически нулевом значении ошибки по частоте вращения.
Предложенная схемная реализация блока определения фазового рассогласования позволяет определять угловое рассогласование Δαфн не 1 раз за оборот вала электродвигателя, а непрерывно по мере поступления импульсов задающей частоты fоп и импульсов частоты обратной связи fос, что позволяет повысить его быстродействие и, соответственно, быстродействие синхронно-синфазного электропривода в режиме фазирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИНХРОННО-СИНФАЗНЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2485665C1 |
| СПОСОБ ФАЗИРОВАНИЯ ВРАЩАЮЩЕГОСЯ ВАЛА ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2649307C1 |
| СПОСОБ ФАЗИРОВАНИЯ ВРАЩАЮЩЕГОСЯ ВАЛА ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2608177C2 |
| ЧАСТОТНО-ФАЗОВЫЙ ДИСКРИМИНАТОР | 2010 |
|
RU2428785C1 |
| СПОСОБ ФАЗИРОВАНИЯ ВРАЩАЮЩЕГОСЯ ВАЛА ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2475932C1 |
| СТАБИЛИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2467465C1 |
| СТАБИЛИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД | 2011 |
|
RU2462809C1 |
| Устройство для управления многодвигательным электроприводом | 1984 |
|
SU1220098A1 |
| Устройство для согласования углового положения синхронно-вращающихся валов электродвигателей постоянного тока | 1983 |
|
SU1100700A1 |
| Устройство для согласования углового положения синхронно-вращающихся валов электродвигателей постоянного тока | 1989 |
|
SU1612368A1 |
Изобретение относится к области электротехники, а именно к устройствам автоматического фазирования синхронизированных электроприводов с фазовой автоподстройкой частоты вращения, и может быть использовано в системах передачи и воспроизведения информации. Технический результат - повышение быстродействия синхронно-синфазного электропривода в режиме фазирования. В синхронно-синфазном электроприводе формирователь дополнительных импульсов снабжен нелинейным элементом с зоной нечувствительности, что позволяет в области низких частот вращения в режиме фазирования повысить быстродействие электропривода за счет уменьшения продолжительности цикла фазирования, а в области высоких частот вращения - за счет отсутствия накопления в циклах фазирования скоростной ошибки. Схемная реализация блока определения фазового рассогласования, выполненного так, как указано в материалах заявки, позволяет повысить его быстродействие и, соответственно, быстродействие электропривода в режиме фазирования за счет непрерывного определения углового рассогласования по мере поступления импульсов задающей частоты и импульсов частоты обратной связи. 4 ил.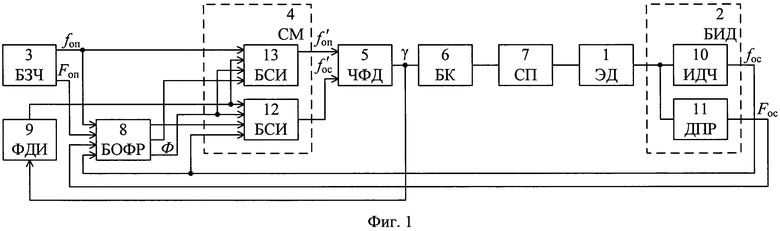
Синхронно-синфазный электропривод, содержащий электродвигатель с установленным на его валу блоком импульсных датчиков, последовательно соединенные частотно-фазовый дискриминатор, блок коррекции, статический преобразователь, выходом подключенный к якорной обмотке электродвигателя, блок определения фазового рассогласования, формирователь дополнительных импульсов, смеситель, блок задания частоты, первый и второй выходы которого соединены соответственно с первым и вторым входами блока определения фазового рассогласования, первый выход блока импульсных датчиков подключен к шестому входу смесителя, первый вход которого подключен к первому выходу блока задания частоты, третий вход - к выходу формирователя дополнительных импульсов, а второй, четвертый и пятый входы - соответственно ко второму, третьему и первому выходам блока определения фазового рассогласования, третий вход которого подключен ко второму выходу блока импульсных датчиков, первый и второй выходы смесителя подключены соответственно к первому и второму входам частотно-фазового дискриминатора, при этом блок импульсных датчиков выполнен в виде импульсного датчика частоты и импульсного датчика положения ротора, объединенные входы которых являются входом блока импульсных датчиков, выход импульсного датчика частоты является первым выходом блока импульсных датчиков, а выход импульсного датчика положения ротора является вторым выходом блока импульсных датчиков, кроме того, смеситель выполнен в виде двух блоков суммирования импульсов, при этом третий и четвертый входы первого блока суммирования импульсов являются соответственно пятым и шестым входами смесителя, первый и четвертый входы второго блока суммирования импульсов являются соответственно первым и вторым входами смесителя, а первый и второй входы первого блока суммирования импульсов, объединенные соответственно со вторым и третьим входами второго блока суммирования импульсов, являются соответственно третьим и четвертым входами смесителя, выходы первого и второго блоков суммирования импульсов являются соответственно вторым и первым выходами смесителя, отличающийся тем, что блок определения фазового рассогласования выполнен в виде первого счетчика импульсов, тактовый вход, объединенный с первым входом схемы разделения совпадающих импульсов, и вход сброса которого являются соответственно первым и вторым входами блока определения фазового рассогласования, а выходы подключены к информационным входам второго счетчика импульсов, при этом тактовый вход второго счетчика импульсов является третьим входом блока определения фазового рассогласования, а входы суммирования и вычитания импульсов подключены соответственно к первому и второму выходам схемы разделения совпадающих импульсов, второй вход которой является четвертым входом блока определения фазового рассогласования, информационные выходы второго счетчика импульсов подключены к входам первого и второго блоков выделения кода, при этом первый и второй выходы первого блока выделения кода являются соответственно первым и вторым выходами блока определения фазового рассогласования, а выход второго блока выделения кода является третьим выходом блока определения фазового рассогласования, формирователь дополнительных импульсов выполнен в виде последовательно соединенных нелинейного элемента с зоной нечувствительности, вход которого является входом формирователя дополнительных импульсов, и одновибратора, выход которого является выходом формирователя дополнительных импульсов, кроме того, первый выход блока импульсных датчиков подключен к четвертому входу блока определения фазового рассогласования, выход частотно-фазового дискриминатора подключен к входу формирователя дополнительных импульсов.
| ЭЛЕКТРОПРИВОД | 1999 |
|
RU2161365C1 |
| RU 2003128573 A, 27.03.2005 | |||
| ЭЛЕКТРОПРИВОД | 1997 |
|
RU2130688C1 |
| SU 1591172 A1, 07.09.1990 | |||
| Световое перо | 1982 |
|
SU1084840A1 |
| US 4638225 A, 20.01.1987 | |||
| DE 3210134 A1, 29.09.1983 | |||
| JP 2010011701 A, 14.01.2010 | |||
| Устройство для транспортировки и закладки породы в выработанное пространство | 1974 |
|
SU578475A1 |
| WO 8600995 A1, 13.02.1986. | |||

