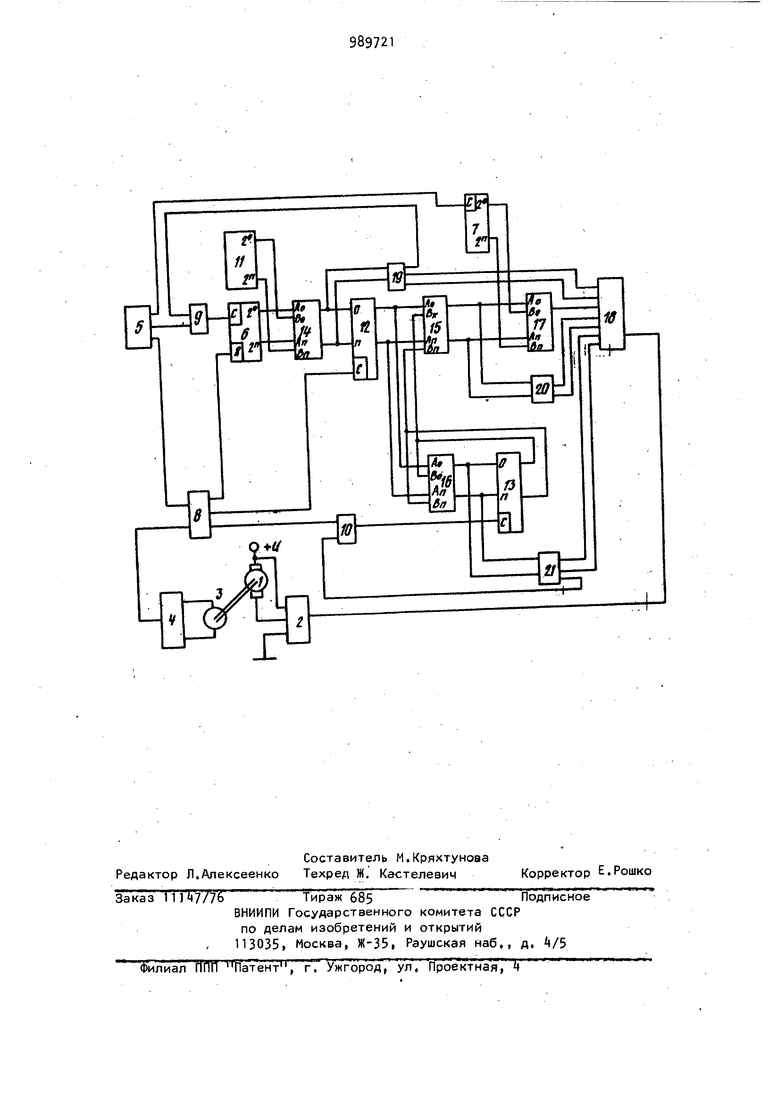
Изобретение относится к электротехнике и может быть использовано в устройствах стабилизации скорости вращения лентопротяжных механизмов. Известны регуляторы скорости вращения электродвигателей постоянного тока содержащие датчик скорюсти, усилитель-формирователь и гане ратор задающей частоты, запитывающи двигатель постоянным йапряжением, изменяющимся при различных внешних, воздействиях Cl 1. Однако при работе электропривода на низких скоростях занесенная кинетическая энергия его мала, а напряжение, приложенное к якорю двига теля, оказывается сравнимым с напря жением холостого хода, что сильно уменьшает приемистость двигателя. 8 связи с этим любое изменение момента нагрузки на валу двигателя приводит к значительно большим изменени ям скорости вращения, чем при работе на скоростях близких к номинальным. Наиболее близким к изобретению является электропривод постоянного тока, содержащий электродвигатель, якорная обмотка которого по ключена к ключевому моменту питания, частотный датчик скорости вращения, жестко связанный с валом электродвигателя, и выходом подключенный к усилителю сигнала датчика, генератор опорной частоты 23. Однако известный электропривод постоянного тока не обеспечивает широкого диапазона регулирования скорости, так как требует при низких скоростях вращения дополнительных маховых масс, что обеспечивает некоторое повышение равномерности и точности, но значительно снижает динамические характеристики, затягивает переходные процессы, создает большие нагрузки в условиях вибрации на узлы опор и, 39 как следствие, снижает срок службы изделия в целом. Цель изобретения - расширение диапазона регулирования скорости враще ния и улучшение динамических характеристик. Поставленная цель достигается тем, что в электропривод постоянного тока дополнктельно введены два счетчика, четыре сумматора, два рем гистра, задатчик кода, блок квантования и управления, первый и второй вентили, вентиль сигнала управления и три блока контроля кода, при этом выход генератора опорной частоты через первый вентиль соединен со счетным входом счетчика, вход R которого через блок квантования и управления соединен с выходом усилителя сигнала датчика, выходы разрядо первого счетчика соединены с первыми ходами первого сумматора, вторые входы которого подключены к выходам разрядов задатмика кода, выходы пер вого сумматора соединены с входами первого регистра и первого блока кон троля кода, тактирующий вход первого регистра соединен с одним из выхо дов блока квантования и управления, выходы первого регистра соединены с первыми входами второго и третьего сумматоров, выход третьего сумматора соединен с входами третьего блока контроля кода и с входами второго регистра, тактирующий вход которого через второй вентиль .соединен с третьим выходом блока квантования и управления, а выходы разрядов второго регистра соединены с .вторыми входами третьего и второго сумматоров, выходы второго сумматора соединены с первыми входами четвертого сумматора и с входами второго блока контроля кода, вторые входы четвертого сумматора соединены с выходами разрядов второго счетчика, счетный вход которого соединен с вторым выходом генератора опорной частоты, третий выход которого подключен к одному из входов блока квантования и управления, выход четвертого сумматора и выходы первого,, второго и третьего блоков контроля кода соединены с соответствующими входами вентиля си нала управления, выход которого соединен с входом ключевого элемента питания .обмотки якоря электродвигателя, а третьи выходы первого и третьего блоков контроля кода соединены соответственно с входами первого и второго вентилей соответственно. На чертеже приведена функциональная схема электропривода постоянного тока« Электропривод постоянного тока содержит электродвигатель 1 постоянного тока, ключевой элемент 2 питания обмотки якоря электродвигателя 1, частотный датчик 3 скорости, жестко связанный с валом электродвигателя 1 усилитель k сигнала датчика, генератор 5 опорной частоты, сметчики 6 и 7 блок 8 квантования и управления, вентили 9 и 10, задатчик 11 кода, регистры 12 И 13,сумматоры , вентиль 18 сигнала управления и три блока 19 20 и 21 контроля кода. Выход частотного датчика 3 скорости подключен к входам усилителя k. Выходы генератора 5 опорной частоты связаны соответственно со счетным входом второго счетчика 7 первым входом вентиля 9 и с входом блока 8 квантования и управления. Выход первого вентиля 9 соединен со счетным входом первого счетчика 6, R-вход которого подключен к блоку 8 квантования и управления, а выходы разрядов счетчика 6 соединены с первыми входами первого сумматора 1, вторые входы которого соединены с выходами задатчика 11 кода. Выходы первого сумматора 14 соединены с входами первого регистра 1 2 и с входами блока 19 контроля кода, первые выходы которого подключены к вентилю 18 сигнала управления, а второй выход - к второму входу вентиля 9. Тактирующий вход первого регистра 12 соединен с соответствующим выходом блока 8 квантования и управления, а выходы регистра 12 соединены с первыми входами второго 15 и третьего 1б сумматоров, вторые входы которых соединены с выходами разрядов второго регистра 13, входы которого подключены к выходам третьего сумматора 1б, к которым подключены также входы третьего блока 21 контроля кода, одни выходы которого подключены к соответствующим входам вентиля 18 сигнала управления, а другой выход - к второму входу вентиля 10, первый вход которого подключен к одному из выходов блока 8 квантования и управления, а выход связан с тактирующим входом второго регистра. 13. Выходы второго сумматора 15 соединены с первыми входами четверто 5 го сумматора 17 и с входами второго блока 20 контроля кода, выходы которого подключены к входам вентиля 18, а его выход - к входу ключевого элемента 2. Вторые входы четвертого сум матора 17 -соединены с выходами разрядов второго двсжчного счетчика 7« Выход усилителя k подключен к блоку 8 квантования и управления. Электропривод постоянного тока ра ботает следующим образом. Сигнал с опорного генератора 5 поступает на счетный вход первого счетчика 6 через вентиль 9. На выходах разрядов счетчика 6 появляется нарастающий код, который суммируется с постоянным кодом с выхода задат чика 11 кода. Суммарный код поступает на входы разрядов первого регистра 12. Одновременно с выхода усилителя k сигнала датчика на вход устройства 8 квантования и управления, поступают импульсы с периодом, определяемым скоростью вращения электродам гателя 1. Блок 8 квантования и управления осуществляет квантование этих импульсов с импульсами Опорного генератора 5 и выдает сигнал, раз решающий перепись сумкарного кода в первый регистр 12, после чего блок 8 выдает сигнал на обнуление первого счетчика 6. После этого происходит новое наполнение первого счетчика 6 таким образом, что н приходу следующего импульса переписи в первый регистр 12 на выходе счетчика 6 образу ется код, пропорциональный следующему периоду частоты датчика 3 скорости вращения. В установившемся режиме работа по вторяется, С выходов первого регистра 12 код поступает на входы второго 15 и третьего 1б сумматоров. Во второй регистр 13 запись производится аналогич но записи в первый регистр 12. Код, переписанный во второй регистр 13i поступает на другие входы третьего сумматора 16, Таким образом, в момент следующей переписи во второй регистр 13 заносится код, равный сумме кодов последнего периода частоты датчика 3 скорости и кода, записанного в нем ранее. С выхода второго регистра 13 результат поступает на входы второго сумматора 15. На выходе второго сумматора 15 образуется код, содержащий информацию о пропорциональ 21 .ной и интегральной составляющих скорости вращения электродвигателя 1. С выхода второго сумматора 15 результирующий код поступает на входы четвер- того сумматора 17f на другие входы которого поступают сигналы с выхода второго счетчика 7. Код на выходах второго счетчика 7 циклически повторяется, что при суммировании с кодом на других входах сумматора 17 приводит к тому, что на выходе сумматора 17 периодически появляется сигнал переполнения, который при каждом переполнении второго счетчика 7 пропадает. Частота появления сигнала переполнения определяется частотой опорлого генератора 5 и емкостью второго счетчика 7 а длительность сигнала переполнения зависит от значения кода, поступающего с выхода сумматора 15. С выхода четвертого сумматора 17 сигнал поступает на вход вентиля 18. Таким образом, на входе и выходе вентиля 18 сигнала управления имеется последовательность импульсов с постоянной частотой и переменной длительностью, которая поступает на ключе- . вой элемент 2 и затем на электродвигатель 1. Для сокращения времени переходных процессов, улучшения захвата предназначены блоки контроля кода. Первый блок 19 контроля кода определяет знак и значение кода на выходе сумматора и при превышении этим КОДОМ определенного значения выдает в зависимости от знака кода сигнал на разгон или торможение в вентиль 18, а при превышении периодом частоты датчика 3 скорости определенного значения запирает вентиль 9. Второй блок 20 контроля кода определяет выход кода второго сумматора 15за допустимые границы и выдает сигнал разгона или торможения в вентиль сигнала 18 управления. Третий блок 21 контроля кода определяет границы линейной зоны работы блоков 16и 13 и при достижении одной из границ выдает сигнал на разгон или торможение в вентиль 18, а также запирает второй вентиль 10. Вентиль18 сигнала управления пропускает импульсы с четвертого сумматора 17 при отсутствии сигналов разгона и торможения. При наличии сигнала разгона или торможения вентиль 18. устанавливает ключевой элемент 2 в соответствующее состояние. 79 Так при разгоне электродвигатели 1 или при переходе на более высокую скорость вращения в первый момент времени длительность периодов частоты датчика 3 скорости значительно np вышает номинальную величину, что фик сируется прежде-всего .блоком 19 контроля кода. Он блокирует прохождение импульсов с выхода четвертого сумматора 17, на вход ключевого элемента 2 поступает сигнал, обеспечивающий подключение электродвигателя 1 к максимально возможному для него постоянному напряжению, что обеспечивает его ускоренный разгон, Блок контроля 21 кода выдает сигнал на вход вентиля 18 сигнала управ ления, подтверждающий необходимость разгона. Окончание сигнала разгона определяется по моменту, когда блоки 19, 20 и 21 контроля кода выдают сигнал, свидетельствующий о том, что коды контролируемых сумматоров находятся в допустимых пределах и электропривод развил скорость вращения, находящуюся в линейной зоне регулирования. Аналогичная работа происходит и при торможении электропривода или при переходе на более низкую скорость вращения. BfioK 19 контроля кода по значению кода на вь1ходе первого .сумматора 14 определяет, что длительность периода частоты датчика 3 скорости меньше требуемой, в связи с чем с его выхода на вход вентиля 18 сигнала управления поступает сигнал., блокирующий прохождение импульсов с выхода четвертого сумматора 17. На выходе вентиля 18 появляется сигнал, устанав lивaющий ключевой элемент 2 в положение, при котором электродвигатель 1 обесточивается, а его обмотка закорачивается, что обеспечивает динамическое торможение электропривода. Необходимость торможения подтверждается блоком 21 контроля кода. Торможение прекращается, как только скорость вращения становится близка к новому требуемому значению и система регулирования входит в линейную зону работы, что определяется по зна чению кодов. В процессе работы электропривода на неравномерный момент нагрузки, ве личина которого изменяется со значи тельной частотой, могут возникнуть 1 моменты, когда значения кодов первого 14 и третьего 16 сумматоров оказываются в допуске, однако их суммарный код имеет значение, свидетельствующее о приближении к границе линейной зоны работы электропривода. В этом случае блок 20 контроля кода на одном из :воих выходов формирует сигнал разгона или торможения, поступающий на вход вентиля 18 сигнала управления, что обеспечивает такую коррекцию скорости вращения, при которой электропривод работает на оптимальном участке зоны линейной работы. Данный электропривод не содержит устройств с большими постоянными времени, отсутствие таких устройств благоприятно сказывается на работе электропривода в области низких скоростей и позволяет осуществлять регулирование скорости вращения в более широком диапазоне частот, в том числе и на частотах много ниже номинальной скорости вращения электродвигателя. Введение устройств контроля кода позволяет свести к минимуму длительность переходных процессов при разгоне, торможении и переходе с одной скорости вращения на другую, что, в свою очередь, облегчает захват на новом режиме работы электропривода, устраняет возможные автоколебания, свойственные системам с регулированием по интегральной составляющей скорости, обеспечивает апериодические переходные процессы, что уменьшает время регулирования и делает электропривод более быстродействующим. Формула изобретения Электропривод постоянного тока, содержащий электродвигатель, якорная обмотка которого подключена к ключевому элементу питания, частотный датчик скорости вращения, жестко связанный с валом электродвигателя и выходом подключенный к усилителю сигнала датчика, генератор опорной частоты, отличающийся тем, что, с целью расширения диапазона регулирования скорости вращения и улучшения динамических характеристик, в него введены два счетчика, четыре сумматора, два регистра, задатчик кода, блок квантования и управления,первый и второй вент или, вент иль сигнала управления и три блока контроля кода, при этом
выход генератора опорной частоты через первый вентиль соединен1:со счетн входом первого счетчика, вход/RtKOTOрого через блок квантования и управления соединен с выходом усилителя сигнала датчика, выходы разрядов первого счетчика соединены с первыми входами первого сумматора, вторые входы которого подключены к выходам разрядов задатчика кода, выходы первого сумматора соединены с входами первого регистра и первого блока контроля кода, тактирующий вход первого регистра соединен с одним из выходов блока квантования и управления, выходы первого регистра соединены с первыми входами второго и третьего сумматоров, выход третьего сумматора соединен с входами третьего блока контроля кода и с входами второго регистра, тактирующий вход которого через второй вентиль соединен с третьим выходом блока квантования и управления, а выходы разрядов второго регисра соединены с вторыми входами второго и третьего сумматоров, выходы второго сумматора соединены с первыми входами четвертого сумматора и с входами второго блока контроля кода, вторые входы четвертого сумматор соединены с выходами разрядов второго счетчика, счетный вход которого соединен с вторым выходом генератора опорной частоты, третий выход которого подключен к одному из входов блока квантования и управления, выход четвертого сумматора и выходы . первого, второго и третьего блоков контроля кода соединены с соответ- ствующими входами вентиля сигнала управления, выход которого соединен с входом ключевого элемента питания обмотки якоря электродвигателя, а третьи выходы первого и третьего блоков контроля кода соединены cdответственно с входами первого и второго вентилей соответственно. Источники информации, принятые во внимание при экспертизе
1.Зимин Е.Н., Яковлев В.И. Автоматическое управление электроприводами. М., Высшая школа, 1979.
2.Авторское свидетельство СССР W , кл. Н 02 Р 5/06, 1978.
7
rl
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления электроприводом печатной машины | 1988 |
|
SU1558837A1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| Устройство для разгона и торможения электропривода | 1986 |
|
SU1341620A1 |
| ЦИФРОВАЯ СЛЕДЯЩАЯ СИСТЕМА | 1965 |
|
SU171171A1 |
| Вентильный электропривод | 1991 |
|
SU1829101A1 |
| Электропривод | 1987 |
|
SU1476584A1 |
| Устройство для стабилизации частоты вращения электродвигателя | 1990 |
|
SU1707723A1 |
| Устройство для программного управления шаговым двигателем | 2021 |
|
RU2784828C1 |
| Позиционный электропривод | 1990 |
|
SU1778904A1 |
| Цифровой электропривод постоянного тока | 1982 |
|
SU1117809A1 |