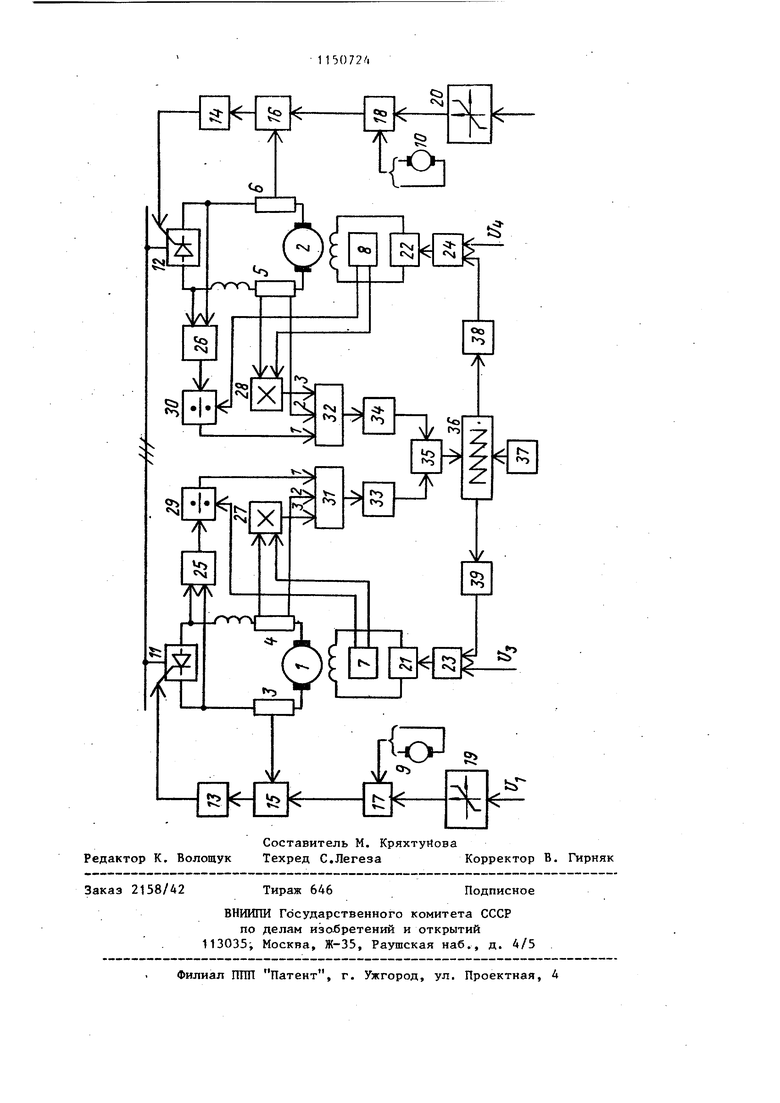
Изобретение относится к электротехнике и может быть использовано в многодвигательньк электроприводах постоянного тока горных машин, работаклцих в общей технологической цепи при питании от индивидуальных тиристорных преобразователей с естественн коммутацией. Известен многодвигательный электропривод, содержащий двигатели посто янного тока с нерегулируемой обмотко возбуждения, тиристорные преобразователи и контуры регулирования, . включающиедатчики скорости и тока якоря, регуляторы скорости и тока якоря. Известный электропривод осуществляет автоматическое регулирование технологического процесса ij , Недостатком его является невозмож ность регулирования гармоник тока .сети, что не исключает опасности возникновения в сети резонансных явлений, которые могут привести к нарушению работы тиристорных преобразователей, а следовательно, и всего электропривода. Наиболее близким к изобретению по технической сущности является двухдвигательный электропривод постоянного тока, содержащий два электродвигателя с обмотками независимого возбуждения, каждый из которых снабжен датчиками тока якоря, потока возбуждения, скорости и подключен к тиристорному преобразователю, управляющий вход которого через последовательно соединенные блок импульснофазового управления, регулятор тока другим входом связанньй с датчиком тока якоря, и регулятор скорости, другим входом связанный с датчиком скорости, подключен к блоку форми рования .задания управляющего сигнала причем . обмотка независимого возбужде ния каждого электродвигателя подклю.чена к регулируемому возбудителю,, связанному с регулятором потока возбуждения 2 . Недостатком указанного электропривода является низкая надежность вследствие возможного нарушения работы тиристорных преобразователей из-за взаимного влияния их друг на друга через сеть. Цель изобретения - повышение надежности. Поставленная цель достигается тем, что в двухдвигательный электропривод постоянного тока, содержащий два электродвигателя с обмотками независимого возбуждения, каждый из которых снабжен датчиками токе якоря, потока возбуждения, скорости и подключен к тиристорному преобразователю, управляющий вход которого через последовательно соединенные блок импульсно-фазового управления, регулятор тока, другим входом связанный с датчиком тока якоря, и регулятор скорости, другим входом связанньп с датчиком скорости, подключен к блоку формирования задания управляющего сигнала, причем обмотка независимого возбуждения каждого электродвигателя подключена к регулируемому возбудителю, связанному с регулятором потока возбуждения, дополнительно введены два датчика напряжения тиристорного преобразователя, два блока умножения, два блока деления, два сумматора, два нелинейных блдка, моделирующих обратные тригонометрические функции косинуса, блок суммирования с логическим элементом И на входе, блок квантования по уровню, задатчик порядка гармоники тока и два регулятора гармоники тока, выход каждого из которых подключен к соответствующему регулятору потока возбуждения, а вход через блок квантования по уровню связан с блоком суммирования с логическим элементом И на входе, к которому подключены выходы нелинейных блоков, моделирукнцих обратные тригонометрические функции косинусу, вход каждого из которых соединен с соответствукмцим сумматором, входы каждого сумматора подключены соответственно к блоку умножения, блоку деления и датчику тока якоря соответствукнцего электродвигателя, причем вход деле-: НИН каждого блока деления соединен с датчиком напряжения тиристорного преобразователя соответствукнцего электродвигателя, а вход делителя с датчиком потока возбуждения этого же электродвигателя, подключенным к первому входу блока умножения, вторым входом соединенного с датчиком тока якоря указанного электродвигателя . На чертеже изображена схема электропривода. Двухдвигательный электропривод постоянного тока содержит два электродвигателя 1 и 2 с обмотками независимбго возбуждения, каждый из которых снабжен соответственно датчиками тока якоря 3, 4 и 5, 6, потока возбуждения 7 и 8, скорости 9 и 10 и подключен к тиристорному преобразователю 11 и 12, управляющий вход которого через последовател1 но соеди ненные блоки импульсно-фазового управления 13 и 14, регуляторы тока 15 и 16, другим входом связанные соответственно с датчиками тока 3 и якоря, и регуляторы скорости 17 и 18 другим входом связанные с датчиками скорости 9 и 10, подключен к блокам формирования задания 19 и 20, причем обмотка независимого возбужде ния каждого электродвигателя 1 и 2 подключена к регулируемому возбудителю 21 и 22, связанному с регуляторами потока возбуждения 23 и 24, два датчика напряжения 25 и 26 тиристорных преобразователей 11 и 12, два блока умножения 27 и 28, два блока деления 29 и 30, два сумматора 31 и 32, два нелинейных блока 33 и 34, моделирующих обратные тригонометрические функции косинуса, блок суммирования 35 с логическим элементом И на входе, блок квантования по уровню 36, задатчик порядка гармоники тока 37и два регулятора гармоники тока 38и 39, выход каждого из которых подключен к соответствующему регулятору потока возбуждения 23 и 24, а вход через блок квантования по уровню 36 связан с блоком суммирования 35 с логическим элементом И на входе, к которому подключены выходы нелинейных блоков 33 и 34, моделирующих обратные тригонометрические функции косинуса, вход каждого из которых соединен с соответствующим сумматором 31 и 32. Входы каждого сумматора 31 и 32 подключены к соответствующему блоку умножения 27 и 28 блоку деления 29 и 30 и датчику тока якоря 4 и 5 соответствующего электро двигателя 1 и 2, причем вход деления каждого блока деления 29 и 30 соединен с датчиком напряжения 25 и 26 ти ристорного преобразователя 11 и 12 соответствующего электродвигателя 1 и 2, а вход делителя - с его датчиком потока позбуждения 7 и 8, подключенным к первому входу блоков умножения 27 и 28, вторым бходом соединенных с датчиками тока якоря 4 и 5. Двухдвигательный электропривод постоянного тока работает следующим образом. На вход регуляторов потока возбуждения 23 и 24 подается постоянное установивщееся в процессе наладки системы привода значение напряжения Ui ,и . Сигнал с выхода регуляторов потока возбуждения 23 и 24 подается на регулируемые возбудители 21 и 22, таким образом в обмотке возбуждения электродвигателя 1 и 2 наводится ток возбуждения, при наличии возбуждения на электродвигатели 1 и 2 подается напряжение питания и они начинают работать. Затем на вход блоков формирования задания 19 и 20 подается задающий сигнал, пропррциональный величине напряжения U, , 2 определяемой технологией производства, откуда на вход регуляторов скорости 17 и 18 поступает сигнал, пропорциональный напряжению задания. С выхода регуляторов скорости 17 и 18 с учетом информации с датчиков скорости 9 и 10 электродвигателя через регуляторы тока 15 и 16 с учетом информации с датчиков тока 3 и 6 сигнал задающего напряжения поступает на входы блоков импульсно-фазового управления 13 и 14, которыми осуществляется управление тиристорньми преобразователями 11 и 12. Сигнал, пропорциональный напряжению, которое было бы, если бы .относительный поток был равен 1, с выхода датчиков напряжения 25 и 26 через делительные блоки 29 и 30, куда также поступает сигнал с датчиков потока возбуждения 7 и 8, подается на первый вход сумматоров 31 и 32, на второй вход которых поступает с датчиков тока А и 5 сигнал, пропорциональный току якоря электродвигателя 1 и 2, а на третий - сигнал, пропорциональный току якоря электродвигателя 1 и 2, который был бы, если бы относительный поток Возбуждения электродвигателя 1 и 2 был равен единице, с блоков У1 ожения 27 и 28, на первый вход которых поступает сигнал с датчиков тока 4 и 5, а на второй - с датчиков потока возбуждения 7 и 8 электродвигателя t и 2. Таким образом, на вход сумматоров 31 и 32 поступает сигнал, пропорциональный ЭДС электродвигателя, при которой относительный лоток электодвигателя был бы равен единице
ля определения угла управления. С вьпсодов сумматоров 31 и 32 поступаетсигнал, пропорциональный углу управения (Х( , , н,а вход нелинейных блоков 33 и 34, где определяются 5 глы управления oi и , которые мели бы место, если бы относительый поток возбуждения электродвигателя был равен единице, эти сигналы с выхода нелинейных блоков 33 и 34 10 поступают на блок суммирования 35, где сравниваются, и сигнал, пропорциональный их разности, подается на вход квантования по уровню 36, в котором определяется выходное напря- 15 жение Овых, к функции от угла управления bot ..
В зависимости от разности углов ос , и « блока квантования по уровню 36 поступает сигнал, пропор- 20
циональный управляющему напряжению на регуляторы гармоник тока 38 и 39, Причем сигналы с выхода регуляторов гармоник тока 38 и 39 имеют различную полярность, например, для регулятора 25 потока возбуждения 23-со знаком (+), для регулятора потока возбуждения 24- со знаком (-).
Регуляторы гармоник тока 38 и 39 отрабатывают управляющее воздействие зо таким образом, что углы управления (Х, иа обеспечивают фазы гармоник тока, при которых их разность равна 180 . Это приводит к тому, что гармоника тока, которая/локализуется ,, данным устройством, становитсяминимальной. Точность, с какой осуществляется взаимная фазировка гармоник, достигается выбором структуры и коэффициентов усиления регуляторов гар- Q МОНИК тока 38 и 39, а также наклона характеристики блока квантования по уровню 36.
В случае, если разность углов управления oi, и of 2 равна нулю, на 45 вход регуляторов гармоник тока 38 и 39 поступает максимальное напряжение равное выходному номинальному напряжению U gt,,;j .
Наклон характеристики блока кван- 50
тования по уровню 36 выбирается в соответствии с формулой
ивык .
4
бых - Bbfx.H
Если разность углов управления
f
ot, и oi равна -, то выходное напряжение с блока квантования по уровню 36 равно нулю. При этом потоки возбуждения электродвигателя равны расчетным, т.е. номинальным, и углы
(1, fc-, , «г «2
В результате технологического
процесса скорости электродвигателей 1 и 2 должны измениться таким образо что изменится знак oi г пРи это соответствукяцим образом изменятся знаки управляющих напряжений на регуляторах гармоник тока 38 и 39, а схема управления токами возбуждени функционирует без изменений.
Задатчик порядка гармоник 37 служит для изменений наклона характеристики блока квантования по уровню 36 в зависимости от того, какая гармоника компенсируется устройством, и следовательно, той допустимой разности в углах управления р(, и ot , при которой векторы гармоники направлены навстречу друг другу.
Если сигнал управления (/, или Ug изменится мгновенно (например, электродвигатель переводится в генераторный режим), то разность в углах уп-. равления щ и « может достичь такой величины, при которой рабочая точка блока квантования по уровню 36 будет находится на нелинейной характеристике после ее нескольких циклов изменения, и в дальнейшем процесс регулирования осуществляется аналогично описанному.
Таким образом, применение предлагаемого электропривода позволяет повысить надежность работы, поскольку исключается влияние электроприводов друг на друга.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многодвигательный электропривод | 1984 |
|
SU1334349A1 |
| Электропривод постоянного тока с подчиненным регулированием параметров | 1980 |
|
SU985914A1 |
| Электропривод | 1985 |
|
SU1277346A1 |
| Электропривод постоянного тока | 1978 |
|
SU817953A1 |
| Устройство форсирования возбуждения синхронного двигателя | 1980 |
|
SU877772A2 |
| Электропривод постоянного тока | 1980 |
|
SU1023600A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011287C1 |
| Вентильный электропривод | 1988 |
|
SU1713072A1 |
| Многодвигательный электропривод агрегата непрерывной обработки полосы материала | 1986 |
|
SU1374394A1 |
| Электропривод | 1984 |
|
SU1228207A1 |
ДВУХДВНГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА, содержащий два электродвигателя с обмотками независимого возбуждения, каждьй из которых снабжен датчиками .тока якоря, потока возбуждения, скорости и подключен к тиристорному преобразователю, управляющий вход которого через последовательно соединенные блок импульсно-фазового управления, регулятор тока, другим входом связанный с датчиком тока якоря, и регулятор скорости, другим входом связанный с датчиком скорости, подключен к блоку формирования задания управляющего сигнала, причем обмотка независимого возбуждения каждого электродвигателя подключена к регулируемому возбудителю, связанному с регулятором п fvt потока возбуждения, о т л и ч а ющ и и с я тем, что, с целью повышения надежности, в него введены два датчика напряжения тиристорного преобразователя, два блока умножения, два блока деления, два сумматора , два нелинейных блока, моделирующих обратные тригонометрические функций косинуса, блок суммирования с логическим элементом И на входе, блок квантования по уровню, задатчик порядка гармоники тока и два регулятора гармоники тока, выход каждого из которых подключен к соответствующему регулятору потока возбуждения, а вход чере.з блок квантования по уровню связан с блоком суммирования с (Л логическим элементом И на входе, к с ;которому подключены выходы нелинейных блоков, моделирующих обратные тригонометрические функции косинуса, вход каждого из которых соединен с соответствукнцим сумматором, входы каждого сумматора подключены соответственно к блоку умнол ения, блоку деления и :л датчику тока якоря соответствующего о электродвигателя, причем вход деления каждого блока деления соединен с датю чиком напряжения тиристорного преобразователя соответствующего электродвигателя, а вход делителя - с датчиком потока возбуждения этого же электродвигателя, подключенным к первому входу блока умножения, вторым входом соединенного с датчиком тока якоря указанного электродвигателя.