Изобретение относится к области автоматизации строительно-отделочных машин и может быть использовано пр.и построении автоматизированных машин для шлифования мозаичных и дру- , гих твердых монолитнь1х полов в промьш - I ленных и общественных зданиях.
Цель изобретения - повышение намещения совершал один оборот, причем код на выходе преобразователя 9 должен соответствовать пройденному расстоянию с соответствующей деной деления младшего разряда. Этот код переписывается в первьш вычитающий счетчик 14. Сигналом ввода информации в этот счетчик служит каждьй сигнал
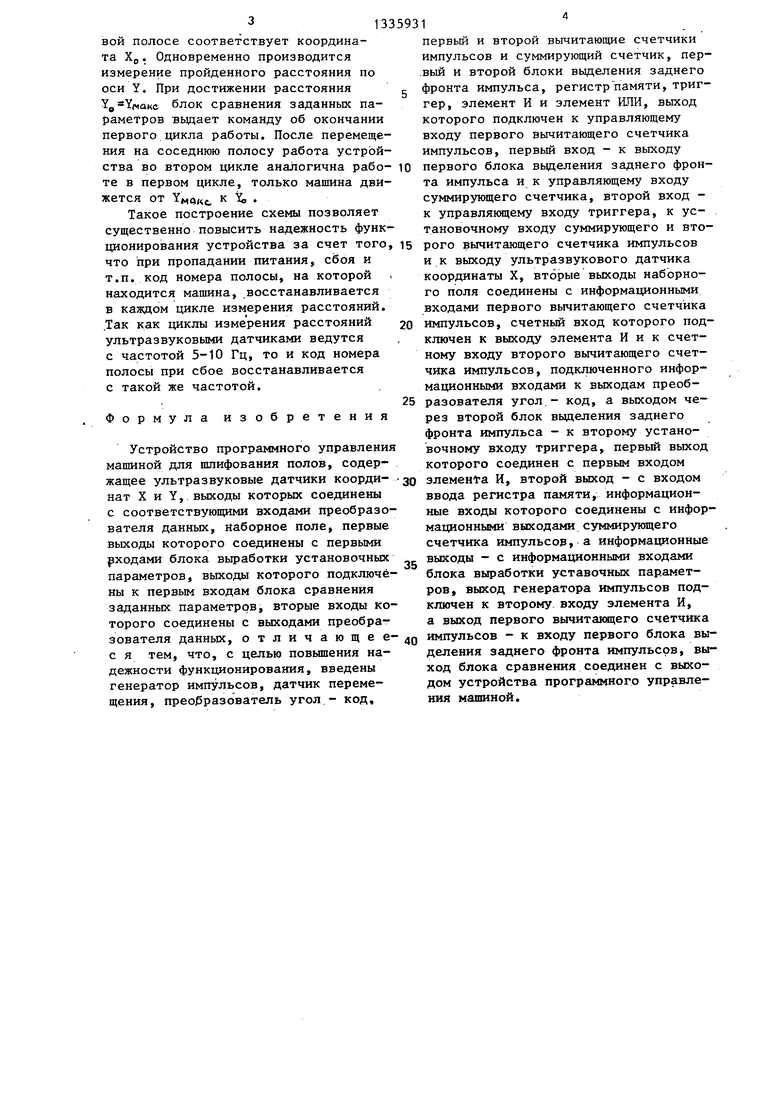
дежности функционирования устройства. Q Запуск ультразвукового датчика 1 изНа фиг. 1 представлена структурная схема устройства; на фиг. 2 - временная диаграмма работы устройства.
Устройство с одержит ультразвуковой датчик 1 координаты X, ультразву- 15 в вычитающий сче;тчик 16 импульсов. ковой датчик 2 координаты Yj преоб- Так как триггер 17 взведен, размерения координаты X, Этим же сигналом взводится триггер 17, устанавливается в нулевое состояние суммирующий счетчик 19 и записьшается код 1
разрватель 3 данных, блок 4 сравнения заданных параметров, блок 5 задания установочных параметров, наборное по- кпе 6, мерное колесо 7, редуктор 8, 20 преобразователь 9 угол - код (например растровый датчик), генератор импульсов 10 напряжения, элемент И 11, блоки 12 и. 13 выделения заднего фрон-, та импульсов (например, собранные на микросхеме К155ЛАЗ), вычитающий счет- чик 14 импульсов, элемент ШШ 15, вычитающий счетчик 16, триггер 17, регистр 18, суммирующий счетчик 19 импульсов и датчик перемещения (не показан) .
Устройство работает следующим образом.
На наборном поле 6 набирается траектория перемещения и вводятся исходные параметры: Хо, YO - координаты начальной точки; макс координаты конечной точки; ЛХ - шаг :обработки; ,o,(j+uX - длина
решающий потенциал с одного из его выходов поступает на элемент И 11 и разрешает прохождение импульсов напряжения с генератора 10 на счетные входы вычитающих счетчиков 14 и 16 импульсов. Частота генератора рассчитывается таким образом, что за время между двумя последующими
25 сигналами.Запуск в вычитающем счет чике 14 мог сформироваться сигнал Заем при максимально возможном пройденном расстоянии. В зависимости от пройденного расстояния изменяется
30 код, записываемьш в вычитаюш й счетчик 14 импульсов, и, следовательно, момент формирования сигнала Заем. По заданному фронту этого сигнала сбрасывается триггер 17 и снимается разрешение с элемента И 11. Таким образом, число импульсов на выходе элемента И 11 является последователь- чым кодом пройденного расстояния.
Импульсы с выхода элемента И 11
35
одного прохода. Машина начинает пер- 40 поступают на счетный вход вычитающевый проход. В процессе перемещения датчик 1 расстояния по оси X измеряет текушде значения посредством измерения временного интервала между
формированием сигнала Запуск и мо- 45 Дится код 1, то в счетчике 16 имментом получения отраженного сигнала и через преобразователь 3 данных передает информацию в блок 4 сравнения заданных параметров, где сравнивается со значением Х. При возникновении gQ машина. Накопление этого кода полосы
производится суммирующим счетчиком 19. Накопленньй в счетчике код переписывается в регистр 18 при каждом сбро-, се триггера 17 сигналов .с его соответствующего выхода. Код номера полосы с регистра 18 переписывается в блок 5 выработки установочных параметров, где определяется значение координаты , причем нулеотклонения вьщается соответствующий сигнал на коррекцию курса в блок управления машиной. Одновременно после начала движения начинается изменение кода на выходе преобразователя 9 .угол - код. Диаметр мерного колеса 7 и передаточное отношение редуктора 3 выбирают с учетом того, чтобы выход-., ной вал редуктора за один цикл пере55
мещения совершал один оборот, причем код на выходе преобразователя 9 должен соответствовать пройденному расстоянию с соответствующей деной деления младшего разряда. Этот код переписывается в первьш вычитающий счетчик 14. Сигналом ввода информации в этот счетчик служит каждьй сигнал
в вычитающий сче;тчик 16 импульсов. Так как триггер 17 взведен, размерения координаты X, Этим же сигналом взводится триггер 17, устанавливается в нулевое состояние суммирующий счетчик 19 и записьшается код 1
0
решающий потенциал с одного из его выходов поступает на элемент И 11 и разрешает прохождение импульсов напряжения с генератора 10 на счетные входы вычитающих счетчиков 14 и 16 импульсов. Частота генератора рассчитывается таким образом, что за время между двумя последующими
5 сигналами.Запуск в вычитающем счетчике 14 мог сформироваться сигнал Заем при максимально возможном пройденном расстоянии. В зависимости- от пройденного расстояния изменяется
0 код, записываемьш в вычитаюш й счетчик 14 импульсов, и, следовательно, момент формирования сигнала Заем. По заданному фронту этого сигнала сбрасывается триггер 17 и снимается разрешение с элемента И 11. Таким образом, число импульсов на выходе элемента И 11 является последователь- чым кодом пройденного расстояния.
Импульсы с выхода элемента И 11
5
го счетчика 16. Так как в этот счетчик по каждому сигналу Запуск с ультразвукового датчика 1 и по каждому заднему фронту сигнала Заем ввопульсов осуществляется деление пройденного расстояния L на длину прохода L/1. Это отношение определяет код номера полосы, на которой находится
313
вой полосе соответствует координата Хд. Одновременно производится измерение пройденного расстояния по оси Y. При достижении расстояния . блок сравнения заданных параметров вьщает команду об окончании первого цикла работы. После перемещения на соседнюю полосу работа устройства во втором цикле аналогична рабо- те в первом цикле, только машина движется от Уцоне, к %, .
Такое построение схемы позволяет существенно повысить надежность функционирования устройства за счет того, что при пропадании питания, сбоя и т.п. код номера полосы, на которой находится машина, восстанавливается в каждом цикле измерения расстояний. Так как циклы измерения расстояний ультразвуковыми датчиками ведутся с частотой 5-10 Гц, то и код номера полосы при сбое восстанавливается с такой же частотой.
Формула изобретения
Устройство программного управления машиной для шлифования полов, содержащее ультразвуковые датчики коорди- нат X и Y, выходы которых соединены с соответствующими входами преобразователя данных, наборное поле, первые выходы которого соединены с первыми уходами блока вьфаботки установочных параметров, выходы которого подключены к первым входам блока сравнения заданных параметров, вторые входы которого соединены с выходами преобразователя данных, отличающеес я тем, что, с целью повышения надежности функционирования, введены генератор импульсов, датчик перемещения, преобразователь угол - код.
1
первьпй и второй вычитающие счетчики импульсов и суммирующий счетчик, пер- .вый и второй блоки выделения заднего фронта импульса, регистр памяти, триггер, элемент И и элемент ИЛИ, выход которого подключен к управляющему входу первого вычитающего счетчика импульсов, первый вход - к выходу первого блока вьщеления заднего фронта импульса и к управляющему входу суммирующего счетчика, второй вход - к управляющему входу триггера, к установочному входу суммирующего и второго вычитающего счетчика импульсов и к выходу ультразвукового датчика координаты X, вторые выходы наборного поля соединены с информационными входами первого вычитающего счетчика импульсов, счетный вход которого подключен к выходу элемента Ник счетному входу второго вычитающего счетчика импульсов, подключенного информационными входами к выходам преобразователя угол - код, а вькодом через второй блок вьщеления заднего фронта импульса - к второму установочному входу триггера, первый выход которого соединен с первым входом элемента И, второй выход - с входом ввода регистра памяти, информационные входы которого соединены с информационными выходами суммирующего счетчика импульсов, а информационные выходы - с информационными входами блока выработки уставочных параметров, выход генератора импульсов подключен к второму входу элемента И, а выход первого вычитаищего счетчика импульсов - к входу первого блока выделения заднего фронта импульсов, выход блока сравнения соединен с выходом устройства программного управления машиной.
t L t 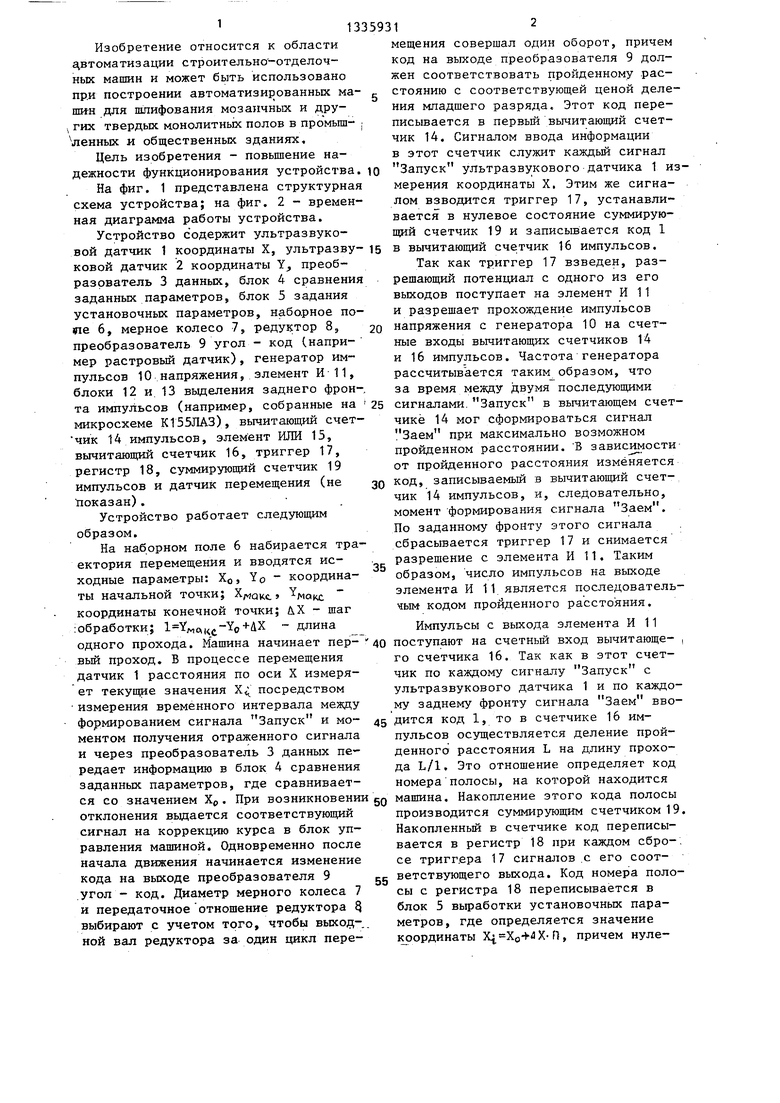
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для считывания графической информации | 1977 |
|
SU1339603A1 |
| Устройство для считывания графической информации | 1977 |
|
SU1208570A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РАЗГОНА И ТОРМОЖЕНИЯ | 1991 |
|
SU1817583A1 |
| АВТОНОМНЫЙ НАВИГАЦИОННЫЙ ПРИБОР | 1994 |
|
RU2098767C1 |
| ДИСКРЕТНОЕ УСТРОЙСТВО ИДЕНТИФИКАЦИИ ЧЕЛОВЕКА-ОПЕРАТОРА | 2002 |
|
RU2227319C2 |
| Устройство для регистрации движения глаз | 1981 |
|
SU1009418A1 |
| АВТОНОМНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2125237C1 |
| ДИСКРЕТНОЕ УСТРОЙСТВО ИДЕНТИФИКАЦИИ ЧЕЛОВЕКА-ОПЕРАТОРА | 2006 |
|
RU2317581C1 |
| Регулятор угла опережения зажигания | 1990 |
|
SU1723349A1 |
| ДИСКРЕТНОЕ УСТРОЙСТВО ИДЕНТИФИКАЦИИ ЧЕЛОВЕКА-ОПЕРАТОРА | 2008 |
|
RU2384880C2 |
Изобретение относится к средствам автоматизации строительно-отделочных машин и мбжет быть использовано при построении автоматизированных машин для шлифования мозаичных и дру-, гих твердых мойолитных полов в промышленных и общественных зданиях. Устройство содержит ультразвуковой датчик координат X и Y, преобразователь данных, блок сравнения заданных параметров, блок выработки уста- ковочных параметров,, датчик перемещения, содержащий мерное колесо и редуктор,, преобразователь угол - код, генератор импульсов напряжения, элементы И, ИЛИ, блоки выделения заднего фронта импульса, вычитающие и суммирующие счетчики импульсов, регистр. Данное устройство позволяет существенно повысить надежность функционирования , так как циклы измерения расстояний ультразвуковыми датчиками ведутся с той же частотой, что и восстановление кода номера полосы. 2 ил. (Л со 00 СП СО 00
| 1971 |
|
SU410923A1 | |
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
| Машина для шлифования мозаичныхпОлОВ | 1979 |
|
SU841921A1 |
| Пишущая машина для тюркско-арабского шрифта | 1922 |
|
SU24A1 |
