Изобретение относится к автоматике и вычислительной технике и может быть использовано для управления исполнительными механизмами координатных измерительных машин.
Цель изобретения повышение быстродействия и надежности устройства.
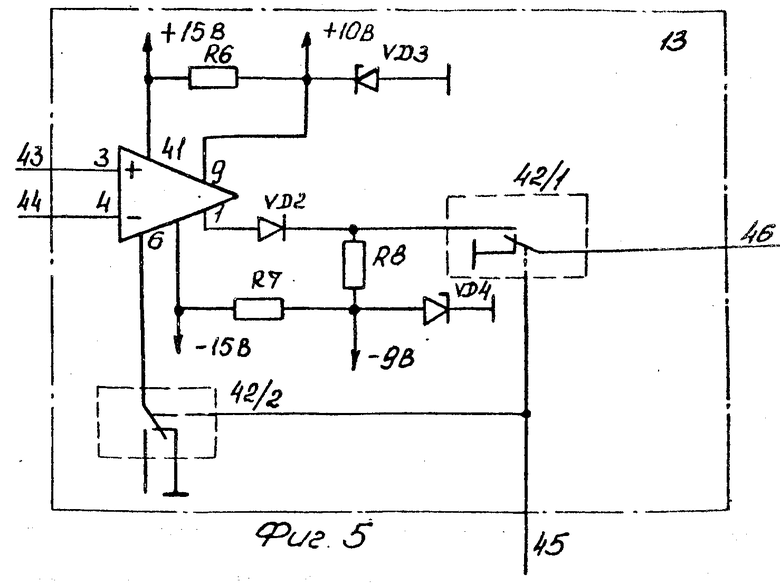
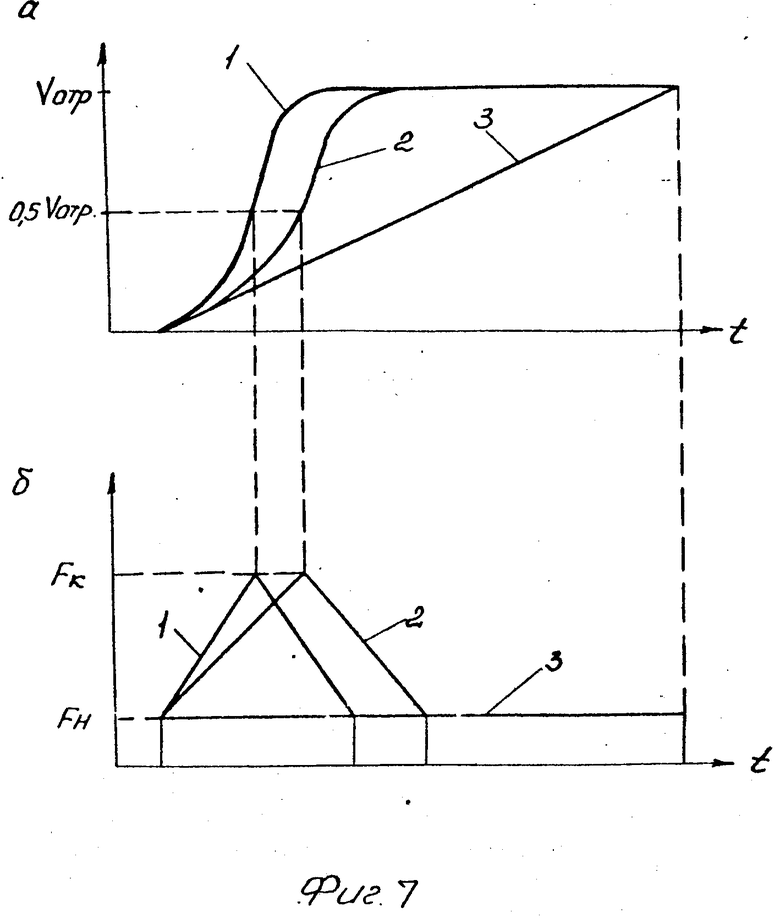
На фиг. 1 представлена блок-схема устройства; на фиг.2 блок-схема блока сравнения; на фиг.3 функциональная схема управляемого генератора импульсов; на фиг.4 функциональная схема интегратора; на фиг.5 функциональная схема компаратора напряжений; на фиг. 6 временные диаграммы работы устройства; на фиг.7 временные диаграммы на выходе первого ЦАП и на суммирующем входе реверсивного счетчика.
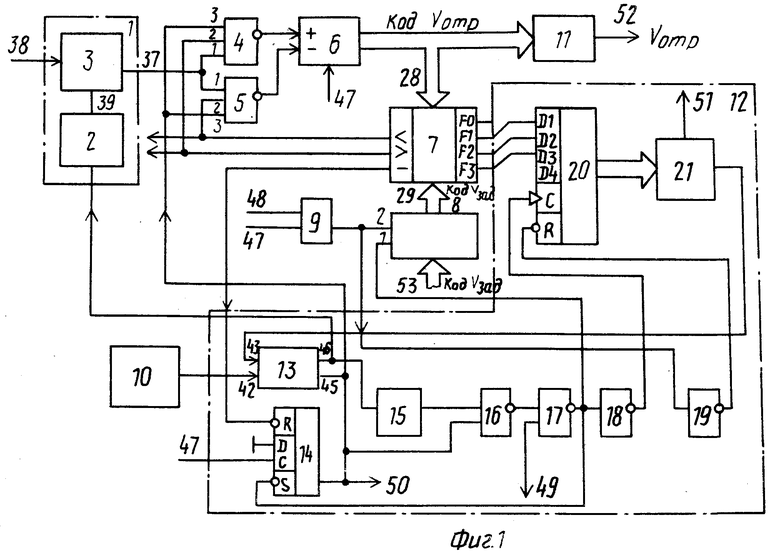
Устройство содержит управляемые генератор импульсов 1, состоящий из интегратора 2 и управляемого генератора 3, первый 4 и второй 5 элементы И-НЕ, реверсивный счетчик импульсов 6, блок 7 сравнения, регистр 8 задания скорости, элемент ИЛИ 9, тахогенератор 10, первый цифроаналоговый преобразователь 11, блок 12 управления ускорением, состоящим из компаратора 13 напряжений, D-триггера 14, преобразователя 15 уровня напряжения, третьего 16 и четвертого 17 элементов И-НЕ, первого 18 и второго 19 инверторов, регистра 20 записи полусуммы, второго цифроаналогового преобразователя 21, фиг.1.
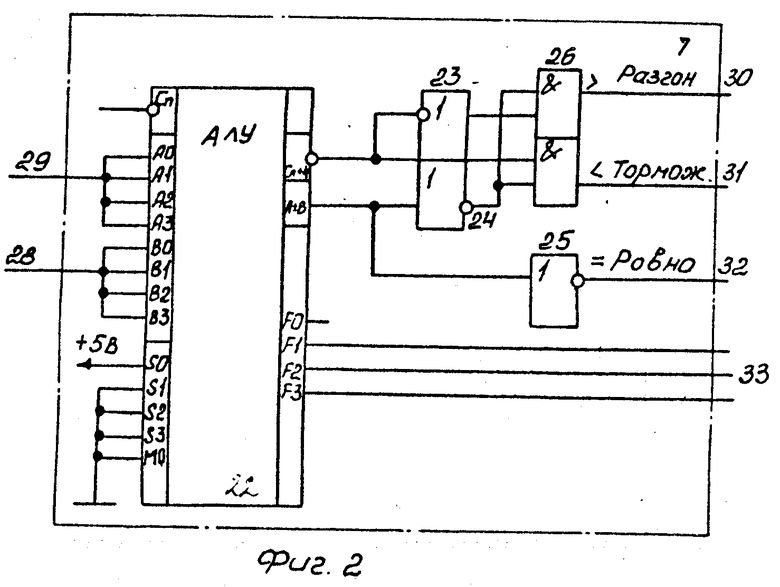
Блок 7 сравнения (фиг.2) состоит из арифметическо-логического устройства (АЛУ) 22, инверторов 23, 24, 25, элементов И 26, 27, 28, 29 входы блока сравнения, 30, 31, 32 выходы, 33 выход кода полусуммы. Код, сформированный на входах S и Мо АЛУ (Мо лог.0, So лог. 1, S1 лог.0, S2 лог.0, S3 лог.0), определяет функцию сложения двоичных чисел по входам А и В. На вход А АЛУ (вход 29 блока 7 сравнения) подается код задания скорости (код Vзад.), на вход В (вход 28 блока 7 сравнения) код отработки скорости исполнительного механизма (код Vотр.).
Если В > A, на выходе Сn+4 формируется единичный потенциал; если А > В нулевой потенциал.
В результате, если А > В, то формируется единичный потенциал на выходе элемента И 26 (выход 30 "Разгон"), если А < В на выходе элемента И 27 (выход 31 "Торможение").
Если А В на выходе формируется единичный потенциал, а на выходе 32 блока сравнения нулевой потенциал. В момент начала разгона или торможения на выходах F144F3 АЛУ (выход 33 блока 7 сравнения) формируется полусумма двоичных кодов
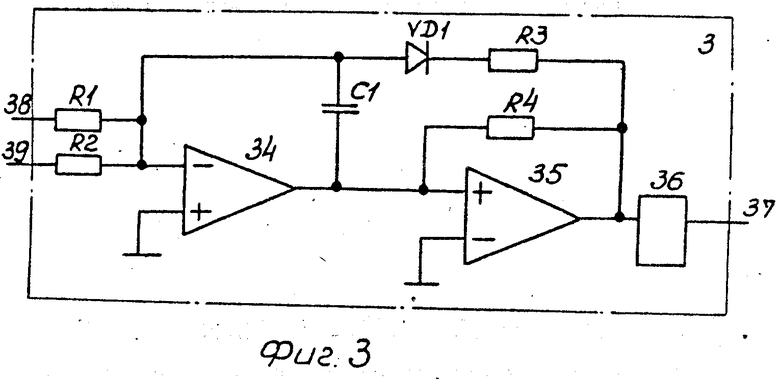
Управляемый генеpатор 3 импульсов (фиг.3), может быть выполнен на микросхемах: элемент 34, 35 У14ОУД7, элемент 36 К561ПУ4 преобразователь уровня напряжения с выхода элемента 35 до уровней логики 155 серии на выводе 37. На вход 38 подается постоянное напряжение, задающее начальную частоту Fн управляемого генератора 3.
На вход 39 подается линейно изменяющееся напряжение с выхода интегратора 2.
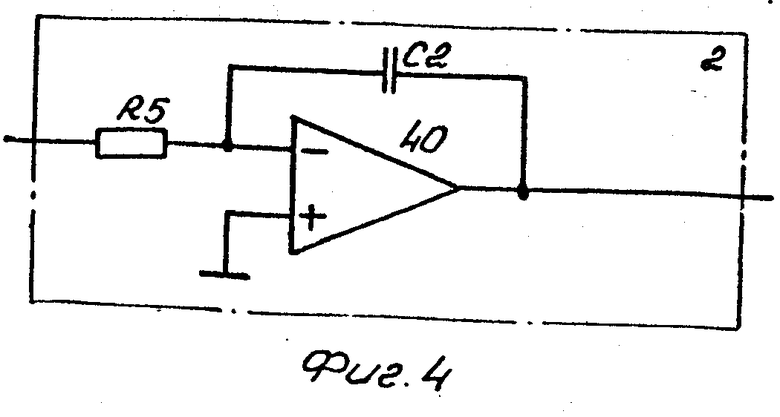
Интегратор 2 может быть выполнен по схеме (фиг.4) на элементе 40, микросхема К14ОУД7.
Входные сравнивающие напряжения подаются на выводы 43, 44 (фиг.5). При подаче разрешающего потенциала на выход 45 элемент 42 разблокируется и выход 46 отсоединяется от корпуса. На выходе 46 формируется отрицательный импульсный сигнал величиной до -9 В: а приблизительно при равенстве потенциалов на входах 43, 44 напряжение скачкообразно возрастает до положительного значения +9 В.
На входы 47 подается сигнал "Сброс", приводящий устройство в исходное состояние. На вход 48 подается сигнал, когда необходимо провести останов электродвигателя, т.е. происходит сброс регистров 8, 20.
Сигнал на вход 49 подается при каждом изменении скорости перемещения исполнительного механизма, записывая новый код Vзад в регистр 8. Применив в качестве регистра 8 микросхему К155ИЕ7, можно заносить код Vзад последовательной посылкой импульсов на его суммирующий вход. Это целесообразно делать для обеспечения как ручного режима задания скорости, так и от ЭВМ.
Выходные сигналы 30, 31, 50 необходимы для подачи их в электронно-вычислительную машину, как признаки при позиционировании в заданную координату.
На вход 51 подается опорное напряжение, обеспечивающее сопряжение напряжений с выходов тахогенератора 10 и цифроаналогового преробразователя 21 и правильной работы компаратора 13 напряжений.
Выходное напряжение до +10 В с выхода 52 цифроаналогового преобразователя 11 поступает на электронную схему управления электродвигателем. Код задания скорости (код Vзад подается на входную шину 53 регистра 8).
Устройство работает следующим образом.
Величина задания скорости в виде двоичного кода Vзад подается на вывод 53 входа регистра 8 задания скорости и записывается в него по сигналу вывод 49 через элемент 17 И-НЕ.
С выхода регистра 8 код Vзад подается на вход 29 блока 7 сравнения, где сравнивается с текущим значением кода скорости отработки (код Vотр.), поступающим на вход 28 с выхода реверсивного счетчика 6.
На выходе 33 блока 7 сравнения формируется полусумма кодов Vзад и Vотр. в начальный момент разгона или торможения.
Информация полусуммы кодов на выходе АЛУ 22 блока 7 сравнения, начиная с второго разряда (сдвиг кода суммы вправо) выхода 33 записывается в регистр 20 записи полусуммы импульсов на входе 49, фиг.1, а через элемент 17 И-НЕ и инвертор N 8. Сигналом с выхода элемента 17 в регистр 8 записывается код Vзад. и устанавливается в единичное состояние по S-входу триггер 14. Выходной высокий потенциал с выхода триггера 14 разблокирует работу компаратора 13 напряжений и он является разрешающим уровнем для элементов И-НЕ, 4, 5, 16.
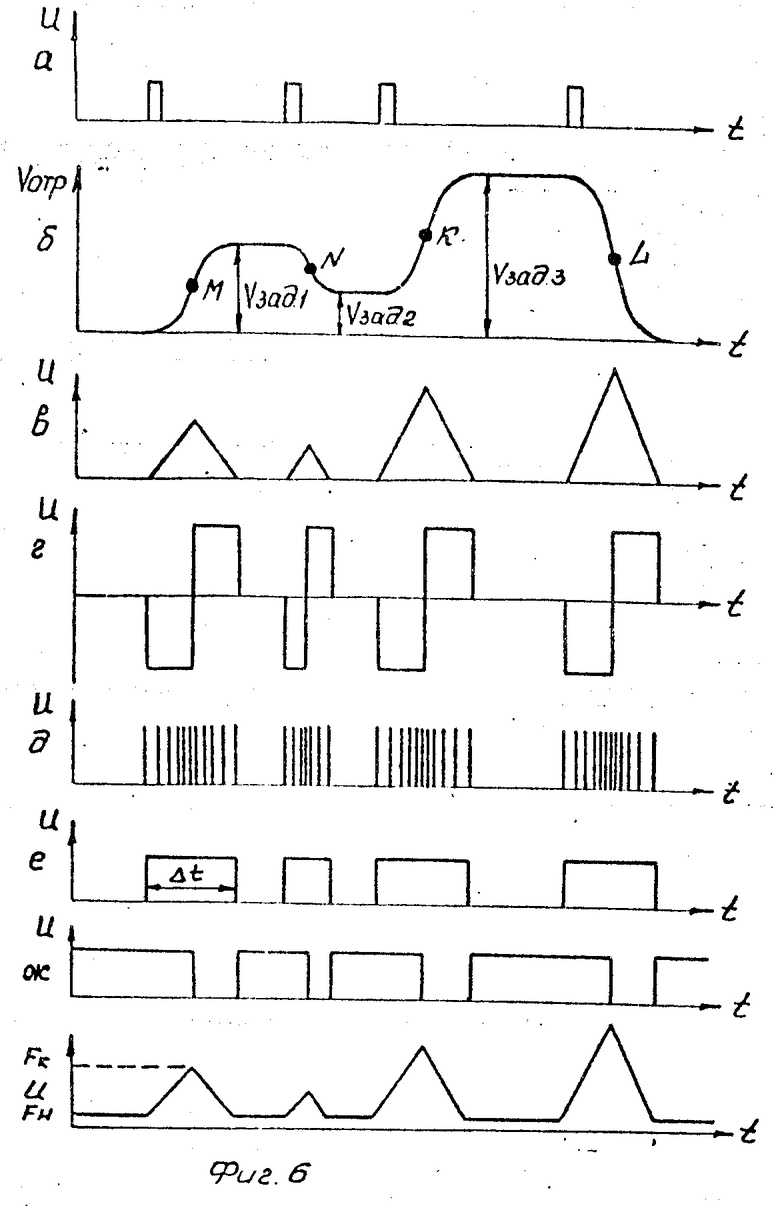
В начальный момент, когда исполнительный механизм еще не начал движение, а код Vзад уже записан в регистр 8, полусумма, записанная в регистр 20 будет равна  и соответствует величине напряжения на выходе ЦАП 21 с учетом масштабирования между напряжением на выходе ЦАП 11 и выходе тахогенератора 10. Это напряжение соответствует (фиг. 1,б) точке М и равно величине 0,5 Vотр. На выходе D-триггера 14 вывод 59 формируются сигналы (фиг.1,е), на выходе 48 компаратора 13 (фиг. 1,г) формируется отрицательное импульсное напряжение, позволяющее формировать на выходе интегратора 2 линейно возрастающее напряжение (фиг.1,в). Частота на выходе 37 управляемого генератора 3 импульсов линейно возрастает до величины Fк (фиг.1, и).
и соответствует величине напряжения на выходе ЦАП 21 с учетом масштабирования между напряжением на выходе ЦАП 11 и выходе тахогенератора 10. Это напряжение соответствует (фиг. 1,б) точке М и равно величине 0,5 Vотр. На выходе D-триггера 14 вывод 59 формируются сигналы (фиг.1,е), на выходе 48 компаратора 13 (фиг. 1,г) формируется отрицательное импульсное напряжение, позволяющее формировать на выходе интегратора 2 линейно возрастающее напряжение (фиг.1,в). Частота на выходе 37 управляемого генератора 3 импульсов линейно возрастает до величины Fк (фиг.1, и).
Так как в начале движения исполнительного механизма код Vотр 0, а на входе 29 блока 8 сравнения задан код Vзад (код Vзад > > код Vотр.), на выходе 30 блока 7 сравнения формируется сигнал "Разгон", и через элемент 4 на суммирующий вход реверсивного счетчика 6 поступают импульсы. На выходе 52 ЦАП 11 возрастает напряжение Vотр. обеспечивая увеличивающееся ускорение до точки М (фиг.1,б).
Механическая связь тахогенератора с электродвигателем позволяет возрастать напряжению, подаваемому на вход 44 компаратора и когда оно превысит напряжение на входе 43, компаратор 13 переходит в другое состояние, формируя на выходе 46 положительное напряжение (фиг.1.г). На суммирующий вход ревеpсивного счетчика 6 поступает сигнал с линейно уменьшающейся частотой от значения Fк до значения Fн, обеспечивающий уменьшающееся ускорение (фиг.1,и).
По кривой разгона (фиг.1,б) после точки М получаем плавное достижение скорости отработки электродвигателя исполнительного механизма до Vзад. При записи в регистр 8 кода Vзад2 < кода Vзад1. на выходе 31 блока 7 сравнения формируется сигнал "Торможение" и на вычитающий вход реверсивного счетчика 6 поступает сигнал с линейно возрастающей и линейно убывающей частотой, обеспечивая плавное торможение электродвигателя.
На фиг. 1, б точка N соответствует полусумме кодов  , точка К полусумме кодов
, точка К полусумме кодов  , точка L полусумме кодов
, точка L полусумме кодов  .
.
При достижении кода Vзад код Vотр. на выходе 32 блока 7 сравнения формируется низкий потенциал, опрокидывающий по R-вход D-триггер 14.
На выходе элемента 16 формируется сигнал низкого уровня (фиг.1,ж), запрещающий изменений скорости электропривода на это время по импульсам вход 49 (фиг.1,а).
Если на фиг.7, а кривая 1о отражает изменение скорости при максимально возможном ускорении, то при увеличении инерционности исполнительного механизма и прежнего ускорения увеличивается усилие на исполнительный механизм, что может привести к его поломке. Изменение частоты на суммирующем входе реверсивного счетчика 6 при максимальном ускорении показано на фиг.7,б, кривая 1.
Механическая связь электродвигателя и тахогенератора позволяет автоматически изменять величину ускорения в зависимости от инерционного исполнительного механизма.
При увеличении инерционности исполнительного механизма (фиг.7,а, кривая 2) частота на суммирующем входе реверсивного счетчика 6 нарастает и спадает более медленно и ускорение имеет меньшую величину. При отсутствии сигнала с тахогенератора скорость исполнительного механизма будет меняться по линейно возрастающему закону (фиг.7,а, кривая 3), а частота на суммирующем входе реверсивного счетчика 6 имеет постоянную величину F4 (фиг.7, 6, кривая 3).
Устройство позволяет осуществлять позиционирование в заданную координату.
Задав координату позиционирования, допустим, I, с устройства в ЭВМ подаются признаки: длительность времени Δ t разгона, фиг.6,е, выход 50, вывод 30 "Разгон", вывод 31 "Торможение" с блока 7 сравнения. В ЭВМ учитывается пройденное расстояние за время разгона.
Импульсы переменной частоты на суммирующем и вычитающем входах реверсивного счетчика 6 показаны на фиг.6,д.
Введение в предлагаемое устройство тахогенератора, механически связанного с электродвигателем, и используемого для осуществления положительной обратной связи, позволяет регулировать величину ускорения в зависимости от инерционности исполнительного механизма, сохраняя при этом усилие на него. За счет этого увеличивается надежность и долговечность работы устройства.
Величина ускорения в устройстве не задается программно, поэтому исключается возможность ошибочного задания слишком большого ускорения, вызывающего поломку устройства.
В данном устройстве в отличие от прототипа отсутствует средняя зона, где частота генератора и ускорение во время разгона и торможения постоянны, что повышает его быстродействие.
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровое устройство для управления позиционным приводом | 1970 |
|
SU911459A1 |
| Устройство для управления следящим приводом | 1987 |
|
SU1442975A1 |
| Устройство управления перемещением сматываемого с рулона длинномерного материала | 1987 |
|
SU1462252A1 |
| Устройство для программного управления | 1977 |
|
SU734620A1 |
| Устройство для управления режимами работы перемоточных станков | 1984 |
|
SU1227584A1 |
| Устройство для управления скоростными режимами перемоточного станка | 1984 |
|
SU1236037A1 |
| Устройство для программного управления шаговым двигателем | 1983 |
|
SU1141378A1 |
| Система позиционного управления | 1985 |
|
SU1247832A1 |
| Устройство для стабилизации частоты вращения электродвигателя | 1990 |
|
SU1707723A1 |
| Устройство для управления перемоточным станком | 1982 |
|
SU1087594A1 |
Использование: в автоматике, вычислительной технике и для управления разгоном-торможением исполнительных механизмов. Цель изобретения - повышение быстродействия и надежности устройства. В устройство, содержащее управляемый генератор импульсов, два элемента И-НЕ, реверсивный счетчик, блок сравнения, блок управления ускорением, введены элемент ИЛИ, первый ЦАП, регистр задания скорости, тахогенератор, причем блок управления ускорением содержит по два элемента И-НЕ и инвертора, компаратор. D-триггер, преобразователь уровня напряжений, регистр записи полусуммы и второй ЦАП. Исходя из механической прочности, в устройстве получено оптимальное ускорение исполнительного механизма за счет положительной обратной связи с тахогенератора и связей между элементами. В результате чего устройство имеет оптимальное быстродействие, высокую надежность и долговечность работы. 7 ил.
УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РАЗГОНА И ТОРМОЖЕНИЯ, содержащее блок управления ускорением, управляемый генератор импульсов, выход которого соединен с первыми входами первого и второго элементов И-НЕ, выходы которых соединены с суммирующим и вычитающим входами реверсивного счетчика импульсов, группа выходов которого подключена к первой группе входов блока сравнения, первый и второй выходы которого соединены соответственно с вторыми входами первого и второго элементов И-НЕ, а группа выходов соединена с группой информационных входов блока управления ускорением, отличающееся тем, что, с целью повышения надежности устройства, в него введены элемент ИЛИ, регистр задания скорости, первый цифроаналоговый преобразователь и тахогенератор, механически связанный с электродвигателем, управляемый генератор импульсов содержит генератор импульсов, вход которого соединен с выходом интегратора, вход которого соединен с входом запуска управляемого генератора импульсов, выход которого соединен с выходом генератора импульсов, блок управления ускорением содержит компаратор напряжений D-триггер, преобразователь уровня напряжений, третий и четвертый элементы И-НЕ, первый и второй инверторы, второй цифроаналоговый преобразователь и регистр записи полусуммы кода задания скорости и начального кода отработки скорости, информационные входы которого соединены с группой информационных входов блока, вход записи регистра записи полусуммы кода задания скорости и начального кода отработки скорости через первый инвертор соединен с выходом третьего элемента И-НЕ, с выходом управления записью блока управления ускорением и S-входом D-триггера, а R-вход через второй инвертор соединен с входом управления установкой блока управления ускорением, группа выходов регистра записи полусуммы кода задания скорости и начального кода отработки скорости соединена с группой входов второго цифроаналогового преобразователя, первый выход которого соединен с первым входом компаратора напряжений, выход которого соединен с выходом разрешения блока управления ускорением и через преобразователь уровня напряжения с первым входом четвертого элемента И-НЕ, второй вход которого соединен с выходом D-триггера, с выходом блока управления ускорением и с вторым входом компаратора напряжений, третий вход которого соединен с первым информационным входом блока управления ускорением, второй информационный вход которого соединен с R-входом D-триггера, выход четвертого элемента И-НЕ соединен с первым входом третьего элемента И-НЕ, группа информационных выходов регистра задания скорости соединена с второй группой входов блока сравнения, четвертый выход которого соединен с первым информационным входом блока управления ускорением, группа выходов реверсивного счетчика импульсов соединена с группой входов первого цифроаналогового преобразователя, а выход тахогенератора соединен с вторым информационным входом блока управления ускорением, третий информационный вход которого соединен с входом записи устройства, вход сброса с входом сброса устройства, выход управления записью блока управления ускорением соединен с входом управления записью регистра задания скорости, первый и второй входы элемента ИЛИ являются входами сброса и останова устройства, а выход элемента ИЛИ соединен с входами сброса регистра задания скорости, выход первого цифроаналогового преобразователя является выходом отработанного кода устройства.
| Устройство для автоматического разгона и замедления двигателя станка с программным управлением | 1983 |
|
SU1120287A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
