1133
Изобретение относится к рыбной промьшшенности, в частности к устройствам для -загрузки рыбы в кассеты обрабатывающих мапшн.
Целью изобретения является повы- шение надежности подачи рыбы в обрабатывающие машины с сохранением ее ориентации.
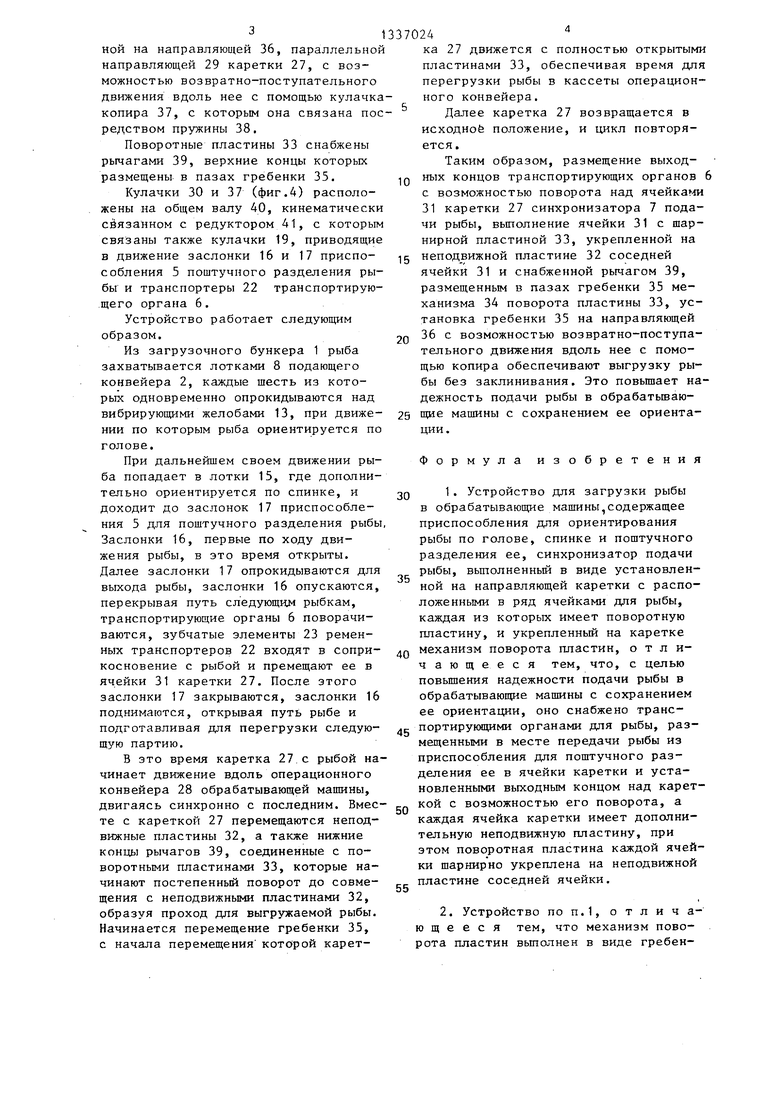
На фиг. 1 изображено устройство для загрузки рыбы в обрабатывающие машины, общий вид; на фиг.2 - разрез А-А на фиг.1; на фиг.З - разрез Б-Б на фиг.2; на фиг«4 - разрез В-В на фиг.2; на фиг.З - приспособление для поштучного разделения 1Тыбы; на фиг.6 - синхронизатор подачи рыбы; на фиг.7 - механизм поворота плас- тин; на фиг.8 - механизм ориентирования рыбы по голове; на.фиг.9 - про фильная пластина ориентатора рыбы по голове.
Устройство для загрузки рыбы в обрабатывающие машины содержит загрузочный бункер 1, подающий конвейе 2, приспособления для ориентирования рыбы по голове 3 и спинке 4s приспособление 5 для поштучного ее разделения, транспортирующие органы 6 для перемещения рыбы из приспособлений 4 для ориентирования рыбы по спинке в лотки синхронизаторов 7.
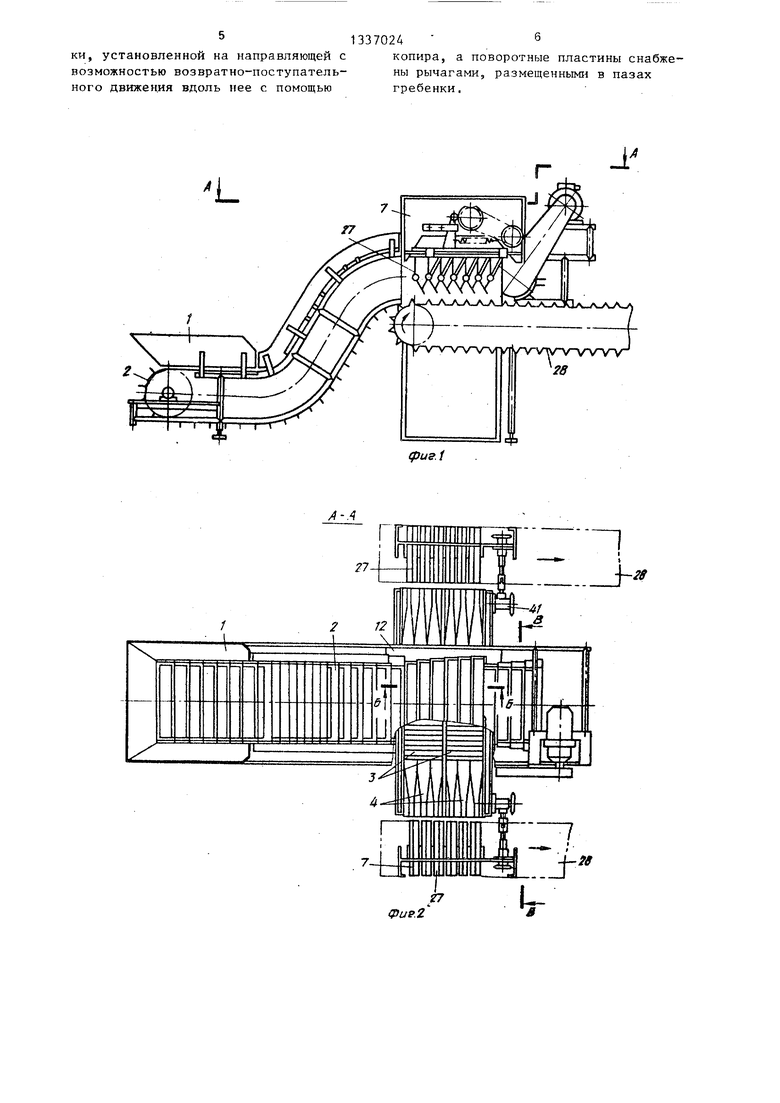
Подающий конвейер 2 (фиг.З) состоит из лотков 8, укрепленных с возможностью поворота на горизонтальных осях 9 цепного полотна 10 и переме- щаюпщхся вдоль направляющих 11, которые на участке,опрокидывания выполнены в виде копира 12.
Приспособления 3 (фиг.З, 8 и 9) для ориентирования рыбы по голове вы полне ы в виде вибрирующих желобов
13,состояш х из профильных пластин
14,которые установлены с интервалом.
При обработке средней рыбы (200- 450 мм) наапучший эффект ориентирования достигается при следующих размерах профиля пластин: радиус впадин R 45 мм, радиус выступов R. 5 мм, высота выступов Н 40 мм, расстояние между выступами Z 100 мм. При обработке рыбы полотно ориентатора 3 на- бирают из пластин, размеры которых
в соответствии с указанными уменьшаются вдвое. При обработке крупной рыбы используют пластины, соответст- вую11Ц1е размеры которых увеличены в два раза.
5 о
о
g
„
5
Приспособление 4 для ориентирования рыбы по спинке представляет собой сужающиеся лотки 15, являющиеся продолжением желобов 13.
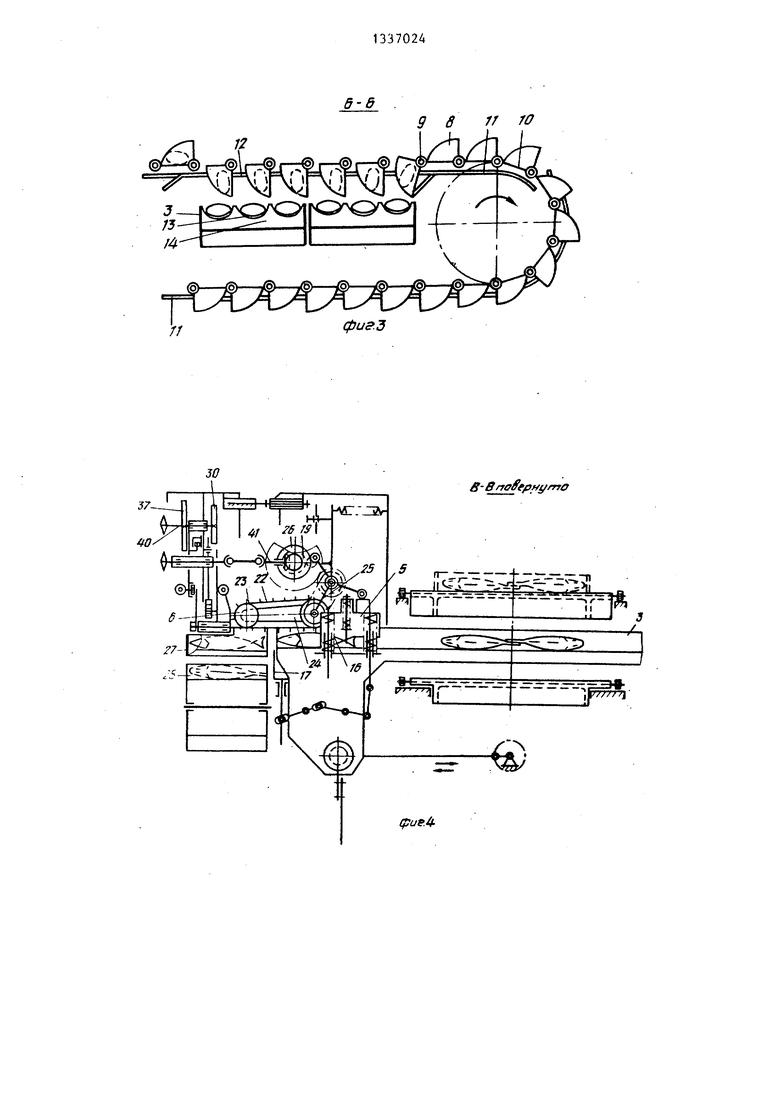
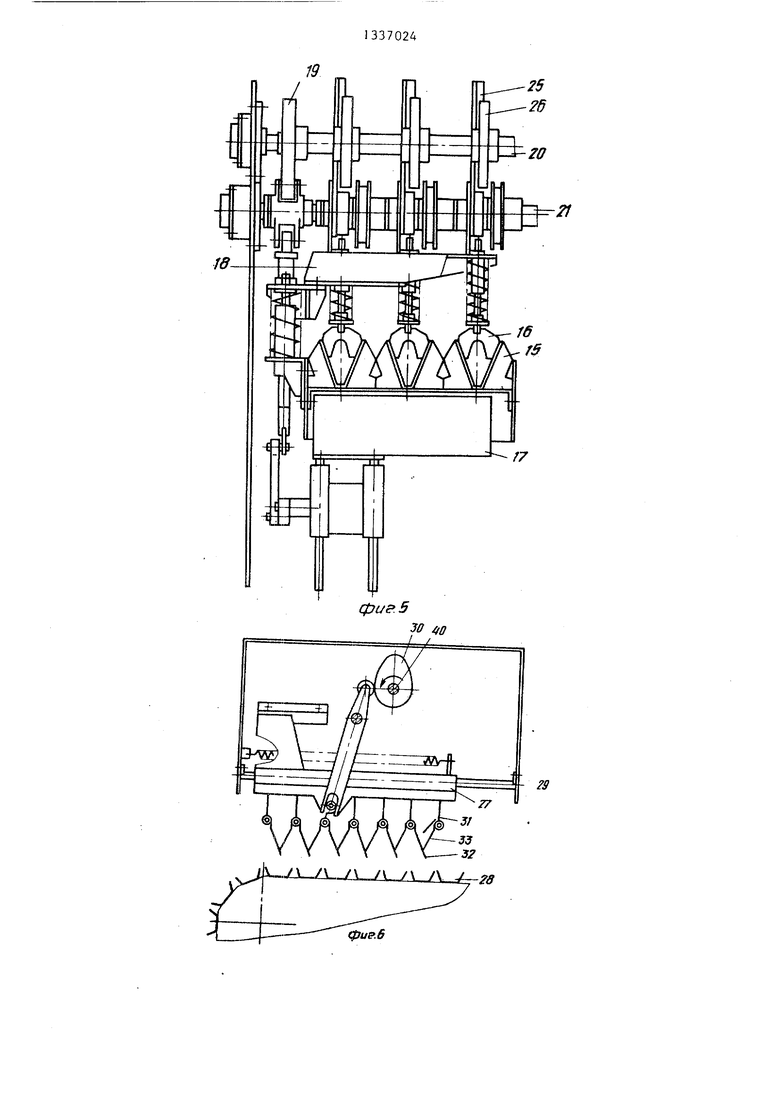
Приспособление 5 (фиг.4 и 5) для поштучного разделения рыбы представляет собой пару заслонок 16 и 17, последовательно установленных вдоль лотков 15 и приводимых в поочередное возвратно-поступательное движение по вертикали. Заслонки 16 смонтированы над лотками 15, подпружинены относительно консоли 18 и имеют фигурный вырез (не показан) по спинке рыбы. Заслонки 17 устаноэлены под лотками 15 с возможностью перемещения снизу вверх. Заслонки 16 и 17 кинематически взаимосвязаны с кулачками 19, размещенными.на кулачковом валу 20.
Транспортирующий орган 6 (фиг.4) размещен в месте подачи рыбы из приспособления 5 для поштучного ее разделения в синхронизатор 7 и представляет собой ряд укрепленных на прит водном валу 21 ременных транспортеров 22 с зубчатыми элементами 23. Каждый транспортер укреплен на рамке
24,соединенной шарнирно с ограничением возможности поворота с рамкой
25,смонтированной с возможностью поворота относительно вала 21 и кинематически связанной с кулачком 26.
Синхронизатор 7 (фиг.4 и 6) выполнен в виде каретки 27, смонтированной над операционным конвейером 28 на направляющей 29 и кинематически связанной с кулачком 30.
В нижней части каретки 27 в ряд размещены ячейки 31 для приема рыбы из приспособления 5, образованные пластинами 32 и 33, причем пластины 32 выполнены неподвижными, а пластины 33 укреплены с возможностью поворота на неподвижных пластинах 32 соседних ячеек.
Выходные концы транспортирующих органов установлены над кареткрй 27 с возможностью поворота.
В закрытом положении пластины 32 и 33 расположены под углом друг к другу и образуют лотки V-образной формы, являющиеся продолжением лотков 15.
Каретка 27 синхронизатора 7 -снабжена укрепленным на ней механизмом 34 поворота пластин, который выполнен в виде гребе/1ки 35, установлен3
ной на направляющей 36, параллельной направляющей 29 каретки 27, с возможностью возвратно-поступательного движения вдоль нее с помощью кулачка копира 37, с которым она связана посредством пружины 38.
Поворотные пластины 33 снабжены рычагами 39, верхние концы которых размещены в пазах гребенки 35.
Кулачки 30 и 37 (фиг.4) расположены на общем валу 40, кинематически связанном с редуктором 41, с которым связаны также кулачки 19, приводящие в движение заслонки 16 и 17 приспособления 5 пощтучного разделения рыбы и транспортеры 22 транспортирующего органа 6.
Устройство работает следующим образом.
Из загрузочного бункера 1 рыба захватывается лотками 8 подающего конвейера 2, каждые шесть из которых одновременно опрокидываются над вибрирующими желобами 13, при движении по которым рыба ориентируется по голове.
При дальнейшем своем движении рыба попадает в лотки 15, где дополнительно ориентируется по спинке, и доходит до заслонок 17 приспособления 5 для поштучного разделения рыбы Заслонки 16, первые по ходу движения рыбы, в это время открыты. Далее заслонки 17 опрокидываются для выхода рыбы, заслонки 16 опускаются, перекрывая путь следующем рыбкам, транспортирующие органы 6 поворачиваются, зубчатые элементы 23 ременных транспортеров 22 входят в соприкосновение с рыбой и премещают ее в ячейки 31 каретки 27. После этого заслонки 17 закрываются, заслонки 16 поднимаются, открывая путь рыбе и подготавливая для перегрузки следующую партию.
В это время каретка 27 с рыбой начинает движение вдоль операционного конвейера 28 обрабатывающей машины, двигаясь синхронно с последним. Вместе с кареткой 27 перемещаются неподвижные пластины 32, а также нижние концы рычагов 39, соединенные с поворотными пластинами 33, которые начинают постепенный поворот до совмещения с неподвижными пластинами 32, образуя проход для выгружаемой рыбы. Начинается перемещение гребенки 35, с начала перемещения которой карет37024
ка 27 движется с полностью открытыми пластинами 33, обеспечивая время для перегрузки рыбы в кассеты операционного конвейера.
Далее каретка 27 возвращается в исходное положение, и цикл повторяется.
Таким образом, размещение выход Q ных концов транспортирующих органов 6 с возможностью поворота над ячейка и 31 каретки 27 синхронизатора 7 подачи рыбы, выполнение ячейки 31 с шарнирной пластиной 33, укрепленной на
15 непод вижной пластине 32 соседней ячейки 31 и снабженной рычагом 39, размещенным в пазах гребенки 35 механизма 34 поворота пластины 33, установка гребенки 35 на направляющей
2Q 36 с возможностью возвратно-поступательного движения вдоль нее с помощью копира обеспечивают выгрузку рыбы без заклинивания. Это повьщ1ает надежность подачи рыбы в обрабатьшаю25 щие машины с сохранением ее ориентации.
Формула изобретения
30 1. Устройство для загрузки рыбы в обрабатывающие машины,содержащее приспособления для ориентирования рыбы по голове, спинке и пощтучного разделения ее, синхронизатор подачи рыбы, выполненный в виде установленной на направляющей каретки с расположенными в ряд ячейками для рыбы, каждая из которых имеет поворотную пластину, и укрепленный на каретке
Q механизм поворота пластин, отличающееся тем, что, с целью повьш1ения надежности подачи рыбы в обрабатывающие мащины с сохранением ее ориентации, оно снабжено транс g портирующими органами для рыбы, размещенными в месте передачи рыбы из приспособления для поштучного разделения ее в ячейки каретки и установленными выходным концом над кареткой с возможностью его поворота, а каждая ячейка каретки имеет дополнительную неподвижную пластину, при этом поворотная пластина каждой ячейки щарнирно укреплена на неподвижной пластине соседней ячейки.
35
0
5
2. Устройство по П.1, отличающееся тем, что механизм поворота пластин вьшолнен в виде гребен51337024
ки, установленной на направляющей с копира, а поворотные пластины снабже- возможностью возвратно-поступатель- ны рычагами, размещенньши в пазах ного движения вдоль нее с помощью гребенки.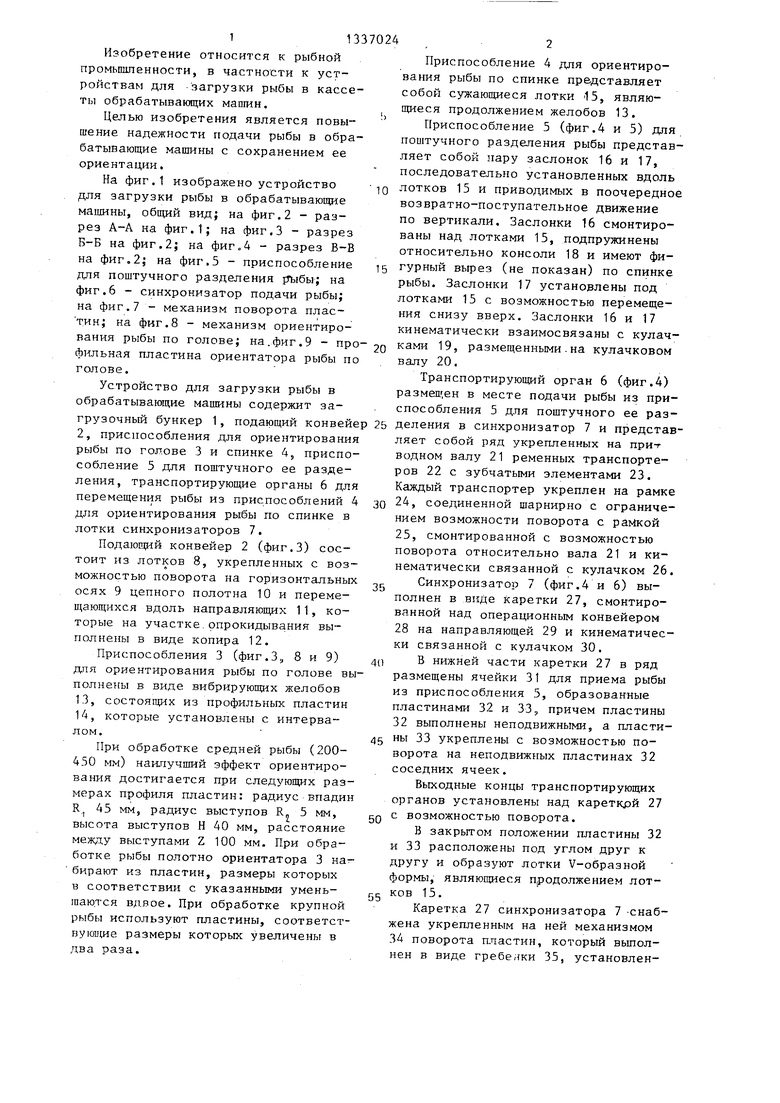
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для загрузки рыбы | 1977 |
|
SU626749A1 |
| Устройство для загрузки рыбы в рыбообра-бАТыВАющиЕ МАшиНы | 1979 |
|
SU835388A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ РЫБЫ В РЫБООБРАБАТЫВАЮЩИЕ МАШИНЫ | 2017 |
|
RU2649340C1 |
| Устройство для загрузки рыбы в рыбообрабатывающие машины | 1988 |
|
SU1637736A1 |
| Устройство для разделки и укладки мелкой рыбы в банки | 1989 |
|
SU1717061A1 |
| МАШИНА ДЛЯ РАЗДЕЛКИ РЫБЫ | 1970 |
|
SU285761A1 |
| УСТРОЙСТВО для ЗАГРУЗКИ МЕЛКОЙ РЫБЫ в РЫБООБРАБАТЫВАЮЩИЕ МАШИНЫ | 1969 |
|
SU251790A1 |
| Устройство для разделки и укладки рыбы в банки | 1973 |
|
SU477712A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОГО РАЗДЕЛЕНИЯ И ОРИЕНТИРОВАНИЯ РЫБЫ | 2016 |
|
RU2645977C2 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТИРОВАНИЯ РЫБЫ ГОЛОВОЙ В ОДНУ СТОРОНУ | 2016 |
|
RU2645974C2 |

Изобретение относится к рыбной промьгашенности и направлено на повышение надежности подачи рыбы в обрабатывающие машины с сохранением ее ориентации. Выходные концы транспортирующих органов установлены с возможностью пов орота над ячейками каретки синхронизатора подачи рыбы. Шарнирная пластина 33 каждой ячейки укреплена на неподвижной пластине, 32 соседней ячейки. Рычаг 39 пластины 33 размещен в пазу гребенки 35 механизма поворота пластины 33. Возвратно- поступательное перемещение гребенки 35 по направляющей 36 обеспечивает копир. Рыба беспрепятственно поступает из приспособления для поштучного разделения ее в ячейки. Ориентация рыбы по голове и спинке исключает заклинивание сихронизатора при выгрузке рыбы. 1 з.п. ф-лы. 9 ил. 2 $ (Л 1)0 я л Jf. А А /Ч /Ч /Ч /V / W.U1Z. W -} (риг.7 (риг.7
L
..J-
f7
Фие.2
5-6
9 8 // Л7
фигЗ
S 8 rroffp f/frrO
.
f
(puf.
/7
фиг. 5
30 ло
29
J- J / /L / /V JL
фие.б
-28
фигЗ
Редактор Н.Швьщкая
Составитель А.Горбачева
Техред М.ДидыкКорректор С.Шекмар
Заказ 4065/4-Тираж 382Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Бриль С.И | |||
| Загрузочные устройства рыбообрабатывающих машин | |||
| М.: Пи- ще:вая промышленность, 1980, с | |||
| Прибор для получения стереоскопических впечатлений от двух изображений различного масштаба | 1917 |
|
SU26A1 |
| Устройство для укладки мелкой рыбы для ее копчения | 1979 |
|
SU874014A1 |
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
