Изобретение относится к машиностроению, в частности к пневмогидроприводам, и может быть использовано в качестве привода исполнительных устройств роботизированных технологических комилексов, а также в системах унравления, сигнализации и контроля.
Целью изобретения является расншрение области ирименения нутем использования Н1танг различного нрофиля и исключения новорота последних относительно корнуса.
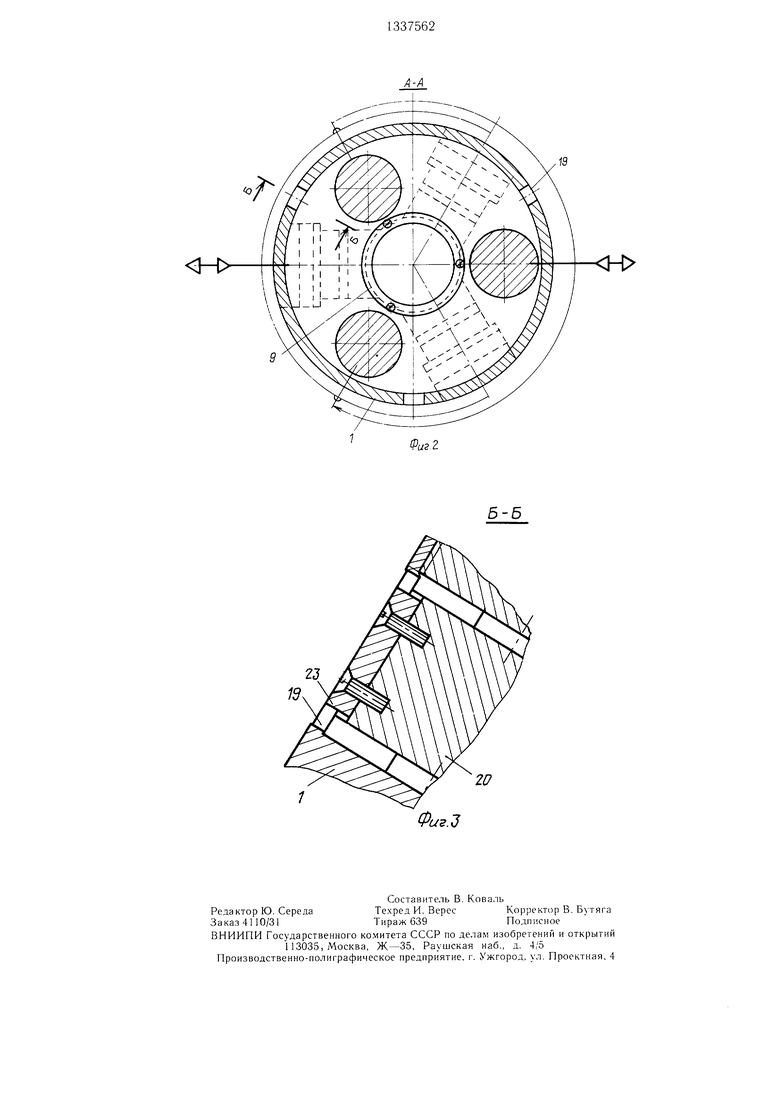
На фиг. 1 схематически представлен привод, разрез; на фиг. 2 - сечение А--Л па фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 2.
Пневматический илаговый привод (фиг. 1) содержит кориус 1 с размеш,енными в нем силовыми цилиндрами 2-4 с поршнями 5-8, управляемые цанговые захваты 9--11, взаимодействующие с подвижной п тангой 12. Привод управления цанговых захватов 9--11 выполнен в виде доиолните;ц ных цилиндров 13-15 с иоришями 16-18. Кроме того, привод снабжен механизмом предот- вращешит новорота штащ и 12 относительно корпуса 1, выиолпенным в виде продольпых пазов 19 па корпусе 1 и втулок 20-22 со шпонками 23 (фиг. 3), расположенными в иазах 19, при этом втулки 20---22 установлены меЖлТу корпусом 1 и штангой 12 с воз- можпостью взаимо.аействия с поршнями 5-8 силовых цилипдров 2--4, а захват 9-11 и до толнительнь е цилиндры 13-1о разменхены во вту.тках 20-22. Втулка 21 жестко связана с корпусом 1.
Пневматический и аговый привод работает следуюшим образом.
При подаче от блока унравления (не показан) рабочей среды в доиолгштельные цилиндры 13--15 их 16-18 воздействуют па цанговые захваты 9-11, фикси- руюшие нтангу 12.
Подачей рабочей среды в силовые цилиндры 2--4 достигается нродольное воз- вратно-ноступательное перемещепие гитан- гн 12 относительно корпуса 1. Шаговая подача Н1танги 12 осуществляется но одной из программ в результате поочередной фикса- нии штанги 12 н,анговыми захватами 9-11 и последовательного перемещения порн11-1я- ми 5-8 в ту или ииую сторону относительно корпуса 1.
Например, рабочая среда подается в полнительный пилнндр 14 и поршень взаимодействуя с цанговым захватом и фиксирует данное положение игганги Пан1ч:)вые захваты 9 и 11 во втулках 20 н 22 в это время свободны и под воздействием порн1ней 5 и 7 перемешаются впиз по чер-
10
15
20
25
30
35
40
45
50
тежу. Затем штангу 10 фиксируют цанговые захваты 9 и 11 во втулках 20 и 22, цанговый же захват 10 во втулке 2 освобождается, да.тее рабочая среда подается под поршни 6 и 8 и штанга 12 перемещается на один Hjar за счет подъема втулок 20 и 22 вверх но чертежу.
Таким образом осуществотяется подача н)танги 12 на один. шаг.
Цикл операций повторяется.
Уменьшение времени цикла может быть достигнуто за счет совмещения рабочего хода, например, втулки 20 с холостым ходом втулки 22. Подача штанги 12 может осуществляться с его фиксацией одним из цанговых захватов 9-11, а нри необходимости, в случае воздействия на штангу 12 больших нагрузок, одновременно двумя или тремя цаш овыми захватами 9-11.
В предлагаемом приводе шаг нодачи может регулироваться упора.ми (не пока- запы), ограничивающими перемещение втулок 20 и 22.
Поскольку исключен п.оворот втулок 20-22 отпосительно корпуса 1 при фиксации 12 захватами 9-И, она со- верн1ает только возвратно-поступательное перемещение.
Цснользование Н1танг 12 с различ1Нз1м чрофиле.м, исключение новорота Н1танг 12 относительно корпуса 1 под воздействием крутяп,их моментов, возможность изменения усилия захвата и иодачи штанги 12 позволяет расн ирить область его примепения.
Формула изобретения
Г1невматическ1-;й шаговьз1Й привод, содержащий ко)пус, 1О меньшей мере два силов з1х цилиндра с поршнями, управляемые цанговые захваты, взаимодействующие с силовыми цилиндрами и подвижной Н1тан- гой, при этом привод управления нанговых захватов вьшолнен в виде дополнительных цилиндров, отличающийся тем, что, с целью расширения области применения путем использования штанг различного нрофиля и исключения новоротг. последних относительно корнуса, привод снабжен механизмом нредотврашения новорота штанги относительно корпуса, выполненным в виде Fipo- дольных назов на корнусе и втулок со HJHOH- ками, расположенными в пазах, при этом втулки установлены между корпусом и штангой с возможностью взаимодействия с поршнями силовых пилин.тров, а захваты и дополнительные цилин.тры размешены во втулках.
о
н
f9
н
Фигг
| название | год | авторы | номер документа |
|---|---|---|---|
| ШАГОВЫЙ ПРИВОД ДЛЯ КОЛОННЫ ОБСАДНЫХ ТРУБ | 1997 |
|
RU2144126C1 |
| Фрикционный захват штока силового цилиндра | 2022 |
|
RU2783318C1 |
| Устройство для фиксации изделий сложной формы | 1980 |
|
SU1043016A2 |
| УСТРОЙСТВО ДЛЯ ИЗВЛЕЧЕНИЯ ДЛИННОМЕРНОЙ ТРУБЫ | 2015 |
|
RU2601711C1 |
| Шаговый конвейер-накопитель | 1986 |
|
SU1382778A1 |
| Привод скважинного насоса | 1988 |
|
SU1588908A1 |
| УСТРОЙСТВО ДЛЯ СЪЕМА ДЕТАЛЕЙ ПРИ ИХ ДЕМОНТАЖЕ | 1972 |
|
SU427825A1 |
| Дискретный привод подач токарных станков | 1972 |
|
SU440235A1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ПОЛЫХ ЦИЛИНДРИЧЕСКИХ ЗАГОТОВОК | 1973 |
|
SU433940A1 |
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ ГЕРМЕТИЧНОСТИ РЕЗЬБОВОГО МУФТОВОГО СОЕДИНЕНИЯ ЭКСПЛУАТАЦИОННОЙ КОЛОННЫ В СКВАЖИНЕ | 1995 |
|
RU2104388C1 |
Изобретение м.б. использовано в роботизированных технологических комплексах и в системах управления, сигнализации и контроля. Цель изобретения - расширение области применения путем использования штанг различного профиля и исключения поворота последних относительно корпуса. Для этого привод снабжен механизмом предотврашения поворота штанги 12, выполненным в виде продольных пазов 19 на корпусе 1 и расположенных в них втулок 20,21,22 со шпонками. Втулки установлены между корпусом и штангой с возможностью взаимодействия с поршнями 5,6,7,8 силовых цилиндров 2,3,4 и в них размещены цанговые захваты 9,10,11 и дополнительные цилиндры 13,14,15. Шаговая подача штанги 12 осуществляется путем поочередной ее фиксации захватами 9,10,11 и последовательного перемещения поршнями 5,6,7,8 относительно корпуса. Путем совмещения рабочего хода одной из втулок с х.х. другой втулки м.б. сокрашено время цикла. 3 ил. Н Н (Л со со ел Oi 1чЭ Н
23
19
20
Фи.
| Пневматический шаговый привод | 1979 |
|
SU802659A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
