Изобретение относится к машиностроению, а именно к управляемым радиальным магнитным опорам.
Цель изобретения - повышение надежности путем снижения амплитуды колебаний ротора в резонансной области.
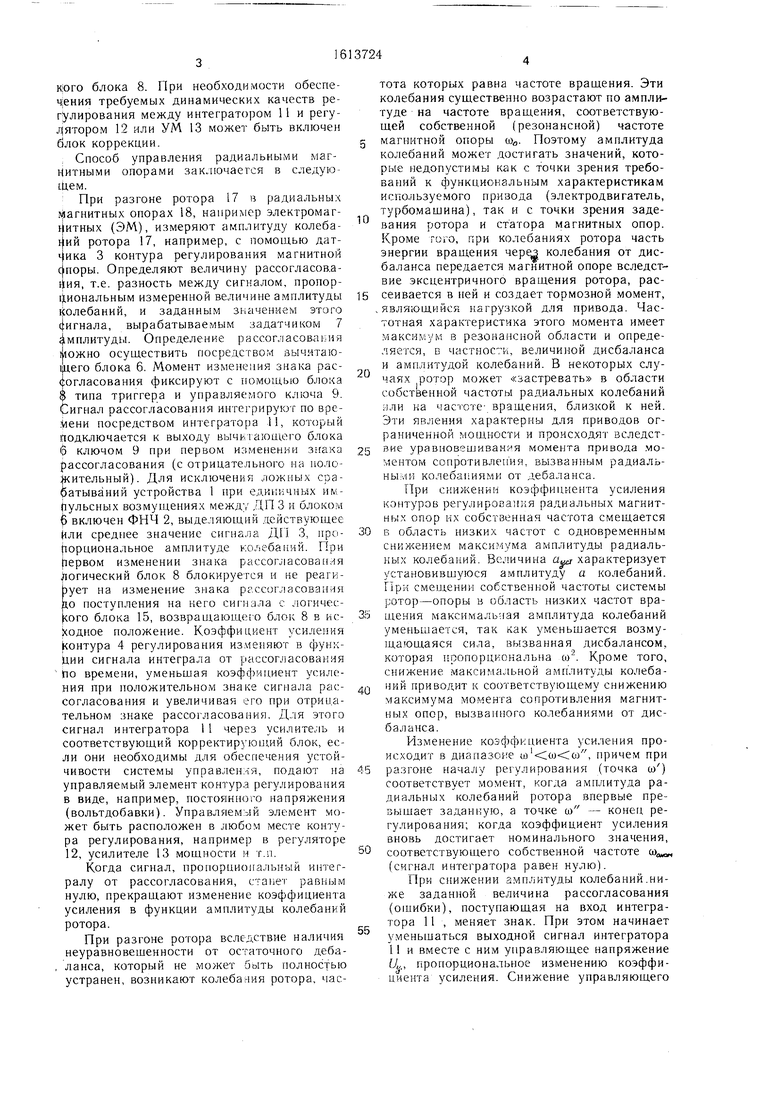
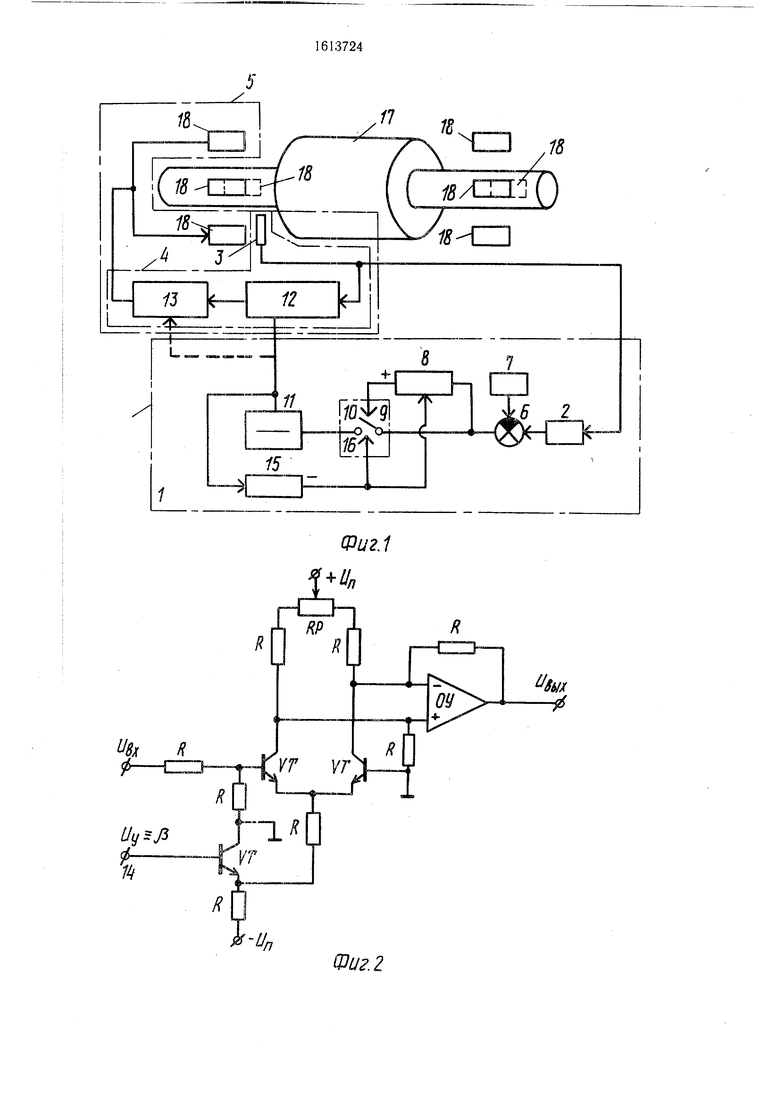
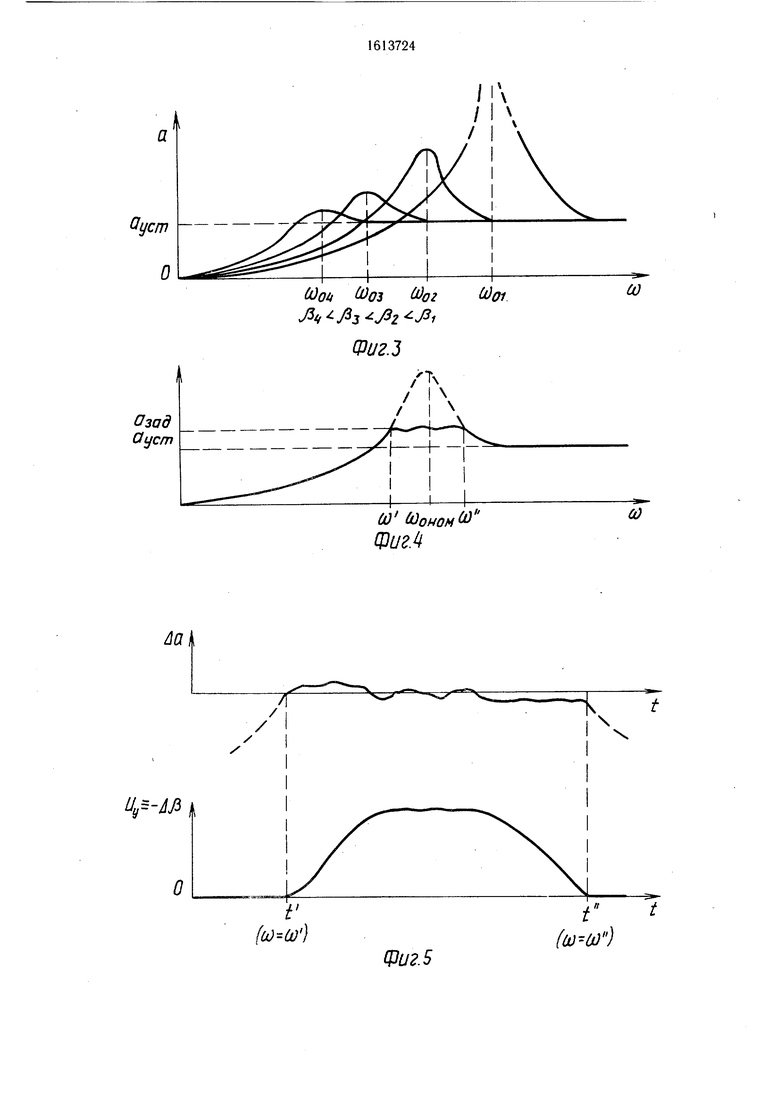
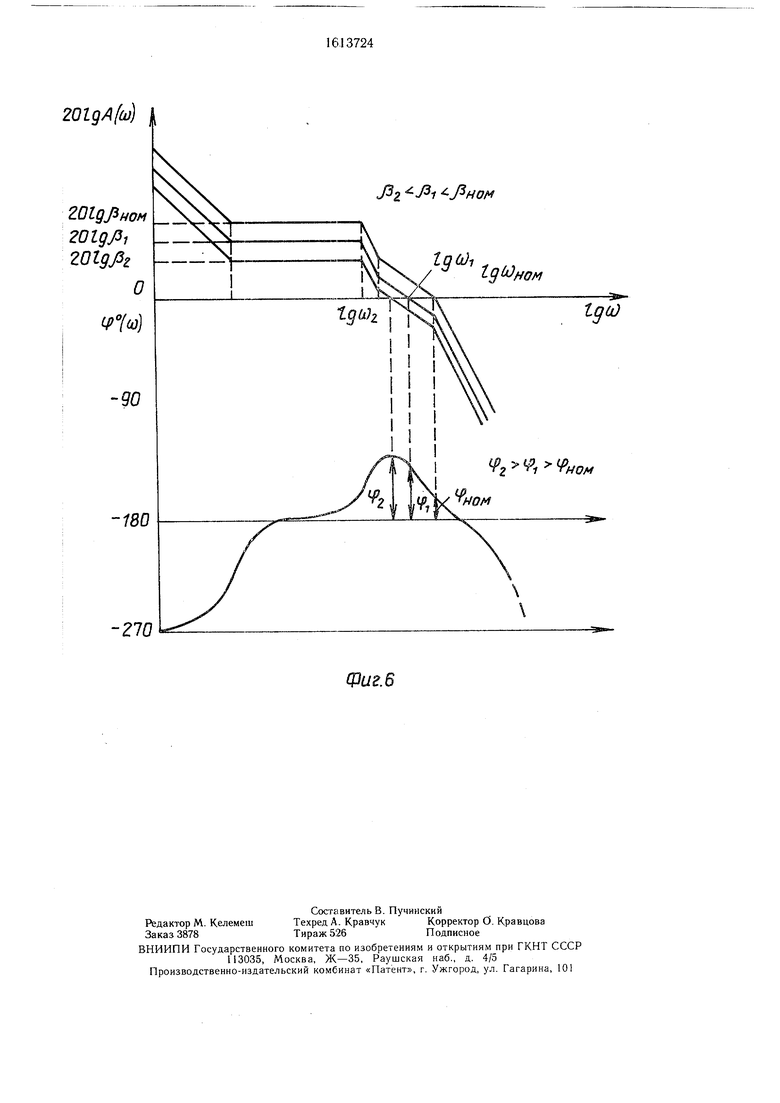
На фиг. 1 дана блок-схема устройства для осуществления способа; на фиг. 2 - электрическая схема элемента контура управления с изменяемым коэффициентом усиления; на фиг. 3 - зависимости амлитуды а вынужденных радиальных колебаний ротора, вызванных остаточным дисбалансом, от частоты при различных величинах коэффи- ента усиления Р; на фиг. 4 - амлитудная характеристика ротора при управлении по предложенному способу; на фиг. 5 - качественные зависимости рассогласования (разности амплитуд) Да и вольт-добавки Ujf,, пропорциональной разности коэффициентов усиления Лр, от времени в процессе разгона и торможения ротора при регулировании коэффициента усиления по предложенному способу; на фиг. 6 - амплитуд- но- и фазочастотные характеристики разомкнутой системы магнитной опоры.
Устройство 1 для осуществления способа содержит фильтр нижних частот (ФНЧ) 2, вход которого соединен с датчиком 3 положения (ДП) контура 4 регулирования магнитной опоры 5, а выход - с вычитающим блоком 6 (сумматор с обратным знаком), с которым соединен также задатчик 7 амплитуды. Вычитающий блок 6 соединен выходом с логическим блоком 8 типа триггера и управляемым ключом 9. Логический блок 8 своим выходом соединен с управляющим элементом 10 ключа 9. Ключ 9 своим выходом соединен с входом интегратора 11, который выходом подключен при необходимости через усилитель к регулятору 12 или усили- телю 13 мощности (УМ) контура 4 регулирования магнитной опоры 5. Место подключения выхода интегратора 11 может быть разнообразным. Например, он может быть подключен к входу 14 элемента контура управления с изменяемым коэффициентом усиления, управляемым напряжением U.
Устройство снабжено логическим блоком 15, соединенным входом с выходом интегратора 11, а вы.ходом - с управляющим элементом 16 кл юча 9 и с в.ходом логичессл
О5
оо ю
N
кого блока 8. При необходимости обеспе- ч:ения требуемых динамических качеств регулирования между интегратором 11 и регу- |ятором 12 или УМ 13 может быть включен блок коррекции.
Способ управления радиальными магнитными опорами заключается в следую тем.
При разгоне ротора 17 в радиальных 01агнитных опорах 18, например электромаг- ь|итных (ЭМ), измеряют амплитуду колеба- h ий ротора 17, например, с помощью дат- ика 3 контура регулирования магнитной поры. Определяют величину рассогласов.а- , т.е. разность между сигналом, пропор- 1;1,иональным измеренной величине амплитуды 1 олебаний, и заданным значением этого (игнала, вырабатываемым задатчиком 7 с мплитуды. Определение рассогласования {южно осуш,ествить посредством вычитающего блока 6. Момент изменения знака рас- (|;огласования фиксируют с помощью блока § типа триггера и управляемого ключа 9. Сигнал рассогласования инте1 рируют по времени посредством интегратора П, который подключается к выходу вычигающего блока б ключом 9 при первом изменении з:гака рассогласования (с отрицательного на иоло- : ительный). Для исключения ложных срабатываний устройства 1 при едкимчных им- Ьульсных возмущениях между ДП 3 и блоко м 6 включен ФНЧ 2, выделяющий действующее или среднее значение сигнала ДИ 3, про- рорциональное амплитуде колебаний. При fiepsoM изменении знака рассогласования |1огический блок 8 блокируется и не реаги- зует на изменение знака рассогласовамия до поступления на него сигнала с логического блока 15, возвран аюидего блок 8 в исходное положение. Коэффициент усиления контура 4 регулирования изменяют в функции сигнала интеграла от рассогласования ho времени, уменьщая коэффглциент усиления при положительном знаке сигнала рассогласования и увеличивая его нрн отрицательном знаке рассогласования. Для этого сигнал интегратора 1 1 через усилитель и соответствующий корректирующий блок, если они необходимы для обеспечения устойчивости системы унравленля, подают на управляемый элемент контура регулирования в виде, например, постоянного напряжения (вольт добавки). Управляемый элемент может быть расположен в любом месте контура регулирования, например в регуляторе 12, усилителе 13 мощности и т.п.
Когда сигнал, пропорциональный интегралу от рассогласования, станет равным нулю, прекращают изменение коэффициента усиления в функции амплитуды колебаний ротора.
При разгоне ротора вследствие наличия
неуравновещенности от остаточного деба, ланса, который не может быть полностью
устранен, возникают колебания ротора, час
0
5
0
0
R
0
5
тота которых равна частоте вращения. Эти колебания существенно возрастают по амплитуде на частоте вращения, соответствующей собственной (резонансной) частоте магнитной опоры Юд. Поэтому амплитуда колебаний может достигать значений, которые недопустимы как с точки зрения требований к функциональным характеристикам используемого привода (электродвигатель, турбомащина), так и с точки зрения задевания ротора и статора магнитных опор. Кроме гого, при колебаниях ротора часть энергии вращения через колебания от дисбаланса передается магнитной опоре вследствие эксцентричного вращения ротора, рассеивается в ней и создает тормозной момент, , являющийся нагрузкой для привода. Частотная характеристика этого момента имеет максимум в резонансной области и определяется, D частности, величиной дисбаланса и амплитудой колебаний. В некоторых случаях ротор может «застревать в области собственной частоты радиальных колебаний или ка частоте- вращения, близкой к ней. Эти явления характерны для приво.дов ограниченной мощности и происходят вследствие уравновешивания момента привода .моментом сопротивления, вызванным радиальными колебаниями от дебаланса.
При снижении коэффициента усиления контуров регулиросанля радиальных магнитных опор их собственная частота смещается Б область низких частот с одновременным снижение. максимума амплитуды радиальных колебаний. Ве.пичина а д-характеризует установившуюся амплитуду а колебаний. npi- смещении собственной частоты системы ротор-опоры в область низких частот вращения максималь;1ая амплитуда колебаний уменьщается, так как уменьшается возмущающаяся сила, вызванная дисбалансом, которая пропорциональна со. Кроме того, снижение MaKCHMajH:.HoM амплитуды колебаний приводит к соответствующему снижению максимума момента сопротивления магнитных опор, вызванного колебаниями от дисбаланса.
Изменение козффк 1иента усиления происходит в диапазоне , причем при разгоне началу регулирования (точка ш ) соответствует момент, когда амплитуда радиальных колебаний ротора впервые превышает заданную, а точке ш - конец регулирования; когда коэффициент усиления вновь достигает номинального значения, соответствующего собственной частоте со. (сигнал интегратора равен нулю).
При снижении амплитуды колебаний.ниже заданной величина рассогласования (ошибки), поступающая на вход интегратора 11 , меняет знак. При этом начинает уменьщаться выходной сигнал интегратора 11 и вместе с ним унравляющее напряжение Ц,., пропорциональное изменению коэффициента усиления. Снижение управляющего
напряжения LL и соответствующее повышение коэффициента усиления р должно осуществляться до тех пор, пока сигнал, пропорциональный интегралу от рассогласования, не станет равным нулю, что соответст- вует номинальному значению коэффициента усиления магнитной опоры, который должен удовлетворять требуемым статическим и ДИJ намическим характеристикам магнитной опоры в номинальном режиме, т.е. при от- сутствии управления по предложенному способу. В этот момент сигнал, пропорциональный интегралу от рассогласования, должен быть отключен, что приведет к прекращению изменения коэффициента усиления.
После прекращения изменения коэффициента усиления система управления должна быть приведена в исходное положение, чтобы при повторном разгоне она могла реагировать на изменение знака рассогласова- ния. Логический блок 14 при снижении управляющего напряжения Uy. ниже нуля отключает выход вычитающего блока 6 от входа интегратора 11 и одновременно возЁра- щается логический блок 8 в исходное положение. Далее амплитуда колебаний ротора изменяется по естественной aмплитyднoJ частотной характеристике. Предложенный способ можно использовать как в магнитных опорах с внещним контуром регулирования, например магнитоэлектрических, электромагнитных, так и в магнитных опорах с внутренней обратной связью (с саморегулированием), например магниторезо- нансных. В этом случае коэффициент усиления внутренней обратной связи опоры и, соответственно, ее жесткости можно изме- нять, воздействуя на частоту питания опоры, добротность резонансного контура и т.д. При торможении ротора происходят те же процессы, что и при разгоне. Поскольку система приведена в исходное положение, при уменьшении частоты вращения в ре- зонансной области возникают колебания ротора повышенной амплитуды. Здесь также необходимо зафиксировать момент, когда амплитуда колебаний превышает заданную величину, а далее регулировать коэффициент усиления по сигналу, пропорциональ- ному интегралу по времени от рассогласования амплитуды колебаний ротора от заданной. В этом случае началу регулирования соответствует точка со, а точка ш - концу регулирования. При этом повышение момента сопротивления может оказывать при маломощных приводах и значительном дебалансе ротора существенное влияние на время разгона. В ряде случаев возможно «застревание ротора на частоте вращения в резонансной зоне. Снижение коэффици- ента усиления в этой зоне частот позволяет исключить «застревание и уменьшить время
0 5 5
0
разгона, а следовательно, и энергию, потребляемую приводом при разгоне
При управлении магнитной опорой с внешним контуром регулирования по предлагаемому способу целесообразно устанавливать сочетание амплитудно- и фазочас- тотной характеристик разомкнутой системы магнитной опоры (фиг. 6). При этом при снижении коэффициента усиления Р( «) и соответствующем снижении собственной (резонансной) частоты ()) происходит возрастание запаса по фазе (, что означает одновременное повышение демпфирующих свойств магнитной опоры, т.е. более резкое снижение максимальной амплитуды колебаний при снижении коэффициента усиления р.
Предложенный способ позволяет снизить (или полностью устранить) также субгармонические и ультрагармонические колебания, поскольку на кратных со,, частотах вращения система управления находится в исходном состоянии и при превыщении амплитуды колебаний заданной величины происходит аналогичное регулирование коэффициента усиления, который определяет и области существования суб. и ультрагармонических колебаний.
Таким образом, изобретение обеспечивает понижение амплитуды радиальных колебаний ротора в управляемых магнитных опорах при разгоне и торможении до уровня заданной амплитуды и тем самым повышение надежности ротора в магнитных опорах, предотвращая возможность задевания вращающихся частей за неподвижные даже при относительно высоких уровнях дисбаланса.
Формула изобретения
Способ управления радиальными магнитными опорами ротора при разгоне, заключающийся в том, что изменяют жесткость опор путем одновременного изменения коэффициентов усиления токов контуров регулирования опор, отличающийся тем, что, с целью повышения надежности управления, определяют величину рассогласования амплитуды колебаний с заданной, фиксируют момент изменения знака рассогласования, формируют сигнал, пропорциональный интегралу по времени от рассогласования, и изменяют коэффициенты усиления токов контуров регулирования опор в функции сигнала, пропорционального интегралу от рассогласования, уменьшая коэффициенты усиления токов при положительном знаке сигнала рассогласования и увеличивая их при отрицательном знаке сигнала рассогласования, а -изменение коэффициентов усиления прекращают при нулевом значении интеграла от рассогласования
18
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления магнитными опорами ротора | 1989 |
|
SU1712691A1 |
| Способ пуска электродвигателя цилиндрической конструкции на радиальных упругих опорах | 1986 |
|
SU1337979A1 |
| Способ балансировки ротора | 1987 |
|
SU1464093A1 |
| Устройство для управления вращением шпинделя балансировочного станка | 1988 |
|
SU1610339A1 |
| СИСТЕМА УПРАВЛЕНИЯ НАВЕДЕНИЕМ ИНЕРЦИОННОГО ОБЪЕКТА | 2002 |
|
RU2225633C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА РЕАКТИВНОЙ ГИДРАВЛИЧЕСКОЙ ТУРБИНЫ И ПИД-РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ СИЛЬНОГО ДЕЙСТВИЯ | 2021 |
|
RU2781087C1 |
| Устройство управления пьезоэлектрическим двигателем | 1978 |
|
SU765911A1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ ГИБКОГО РОТОРА НА ЭЛЕКТРОМАГНИТНЫХ ПОДШИПНИКАХ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2618001C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ ГИРОСКОПОВ | 2000 |
|
RU2176783C1 |
| УСТРОЙСТВО ДЛЯ ФОРСИРОВАННОГО РАЗГОНА АСИНХРОННОГО ГИРОДВИГАТЕЛЯ | 1971 |
|
SU1840169A1 |
Изобретение относится к машиностроению, а именно к управляемым магнитным опорам. Цель изобретения - повышение надежности. Измеряют коэффициенты усиления токов радиальных магнитных опор в функции интеграла по времени от рассогласования измеренной и заданной амплитуд радиальных колебаний ротора. Это позволяет снизить амплитуду радиальных колебаний ротора в резонансных областях до заданного значения, сделать ее инвариантной к величине дисбаланса и динамическим характеристикам радиальных магнитных опор. 6 ил.
Фиг. 2
Оуст I
COoii 02
U2.Z
/
(jOoi
(Jj (t)OHOM(J
ЩигМ
№г5
201дА ш)
ZOlQj HOM 20tgJ3i
2019А О
М
-90
-180
Фиг.6
J32 А
г да),
-Э
ЦО)
