Изобретение относится к машиностррет Нию, а именно к управляемым магнитным опорам высокоскоростных роторов, и может найти применение в центрифугах, турбомашинах, шпинделях и других устройствах Йри разгоне и торможении ротора.
Известен способ управления радиальными опорами рртора, состоящий в том, йТо при подходе в процессе разгона ротора к резонансной частоте вращения скачкооб разно снилсают жесткость радиальных опбр посредством специальных электромагнитов и переводят колебательную систему роторрадиальные опоры в зарезонансную область,.
Недостатком такого способа является необходимость установки дополнительных электромагнитов, повышенное энергопотребление, большая амплитуда изгибных колебаний ротора в области, критических частот вращения и низкая вследствие этого надежность всего роторного узла.
Наиболее близким к изобретению является способ управления магнитными опорами ротора, включающий измерение радиальных колебаний концов ротора, сравнение их с заданным значением и изменение в зависимости от сигнала рассогласования напряжения или тока электромагнитов радиальных опор, измерение аксиального смещения ротора и управление в зависимости от него напряжением или токами аксиальных электромагнитов, расположенных у концов ротора.
Недостатком такого способа является низкая надежность роторного узла вследствие большой амплитуды изгибных колебаний ротора в области критических частот вращения, а также ограниченные функциональные возможности вследствие отсутствия управления изгибными колебаниями ротора,
1Делью изобретения является повышение надежности и расширение функциональных возможностей магнитных опор ротора путем снижения амплитуды изгибных колебаний ротора в области его критических частот вращения при разгоне или торможении.
Указанная цель достигается тем, что согласно способу управления магнитными опорами ротора, заключающемуся в измерении величин радиальных колебаний концов ротора, сравнении их с заданным значением и изменении в зависимости от сигнала рассогласования напряжения или тока электромагнитов радиальных Опор, измерении аксиального смещения ротора и управлении в зависимости от аксиального смещения напряжением или токами аксиальных электромагнитов, расположенных у концов ротора, устанавливают одно из предельно допустимых максимальное или минимальное значение токов аксиальных электромагнитов, измеряют радиальные колебания ротора в плоскости пучности его изгибных колебаний, вычисляют амплитуду Л изгибных колебаний по формуле
. . ai(l - 2 Z) Н-а2 Z ,,, А макс (, (1)
где ai, 32- измеренные величины радиальных колебаний концов ротора;
аз - измеренная величина радиальных колебаний в плоскости пучности изгибных колебаний ротора;
1 - длина ротора;
Z - осевая координата плоскости пучности изгибных колебаний относительно центра ротора,
вычисленную величину сравнивают с заданным значением, при превышении А заданного значения формируют сигнал, пропорциональный интегралу по времени от рассогласования, и на величину этого сигнала одновременно изменяют токи в аксиальных электромагнитах в сторону другого
предельно допустимого значения, в случае
.достижения током по крайней мере одного
аксиального электромагнита предельно допустимого значения токи обоих электромаг{1ИТОВ скачкообразно изменяют до начальных предельно допустимых значений.
Для обеспечения стабильности динамических характеристик подвеса ротора в аксиальном направлении возможно при изменении токов аксиальных электромагнитов осуществлять одновременное обратно пропорциональное токам изменение коэффициента усиления токов блока управления аксиальной опорой.
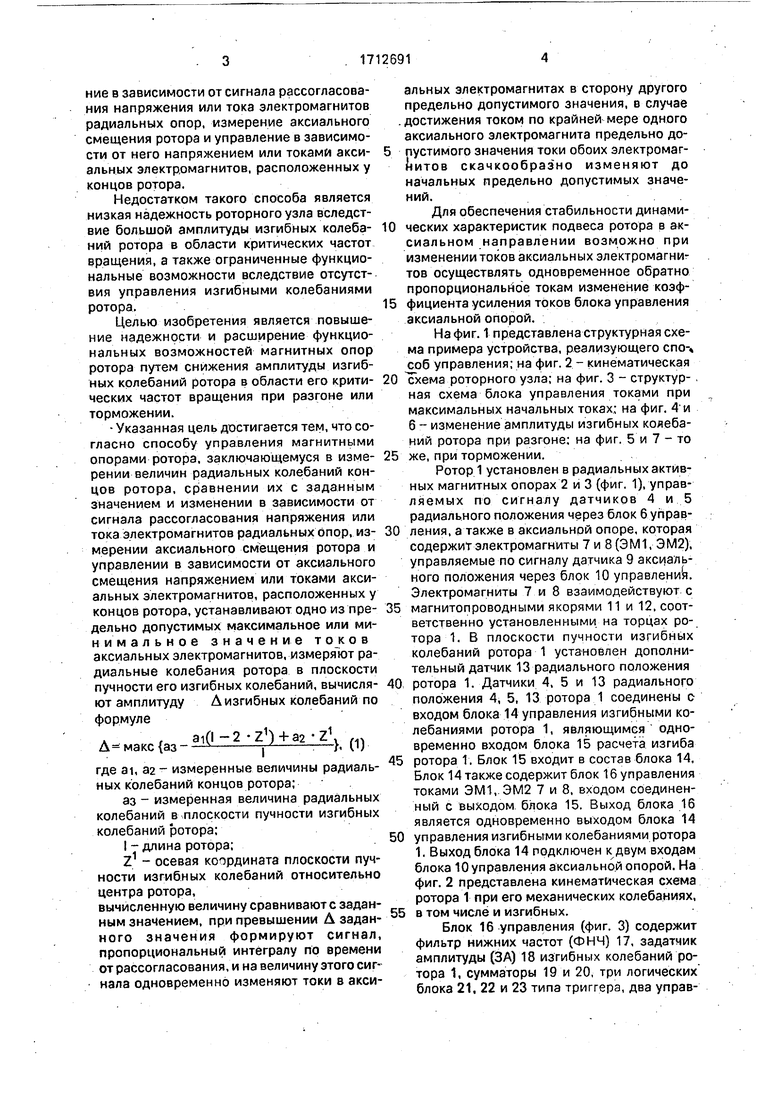
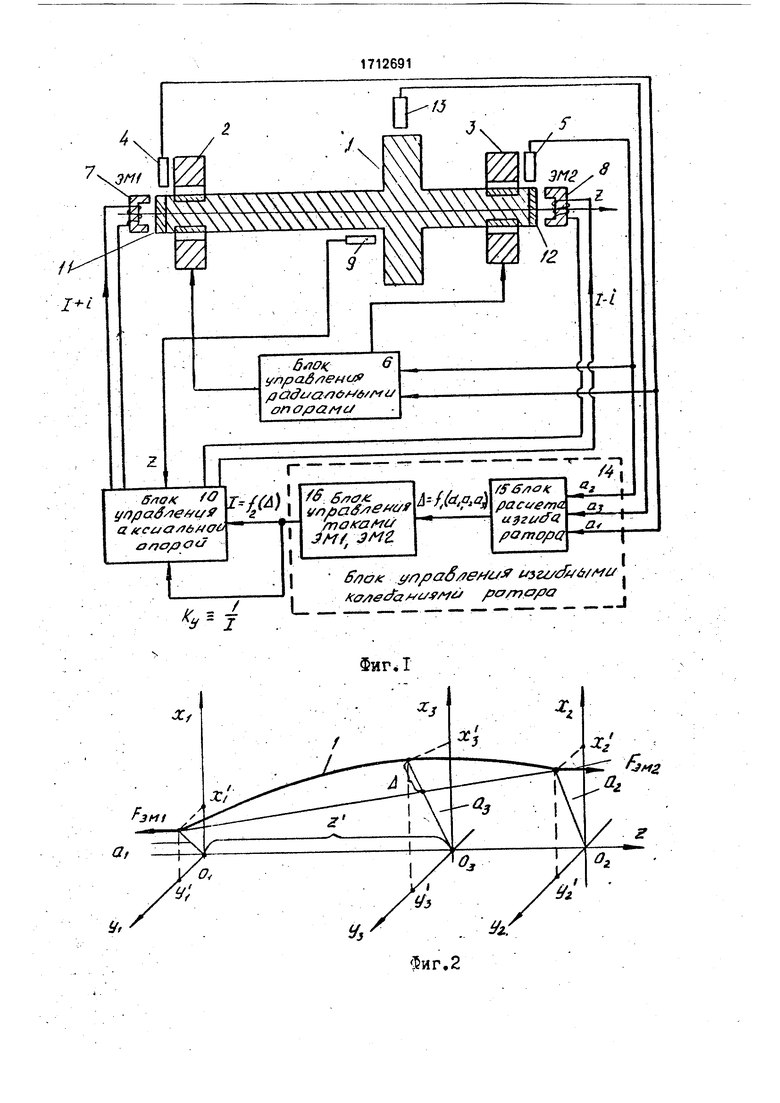
На фиг. 1 представлена структурная схема примера устройства, реализующего спо- соб управления; на фиг. 2 - кинематическая
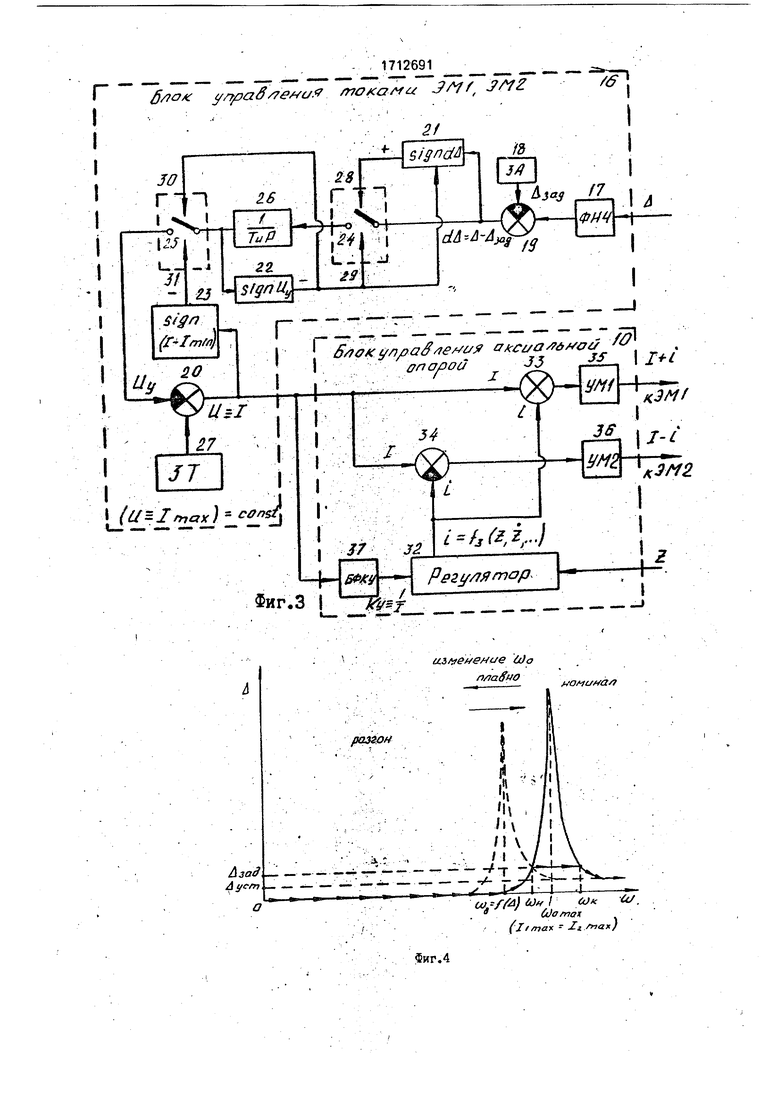
0 Тхема роторного узла; на фиг. 3 - структур- , ная схема блока управления токами при максимальных начальных токах; на фиг. 4и б - изменение амплитуды изгибных колебаний ротора при разгоне; на фиг. 5 и 7 - то
5 же, при торможении.
Ротор 1 установлен в радиальных активных магнитных опорах 2 и 3 (фиг. 1), управляемых по сигналу датчиков 4 и 5 радиального положения через блок буправ0 ления. а также в аксиальной опоре, которая содержит электромагниты 7 и 8 (ЭМ1, ЭМ2), управляемые по сигналу датчика 9 аксиального положения через блок 10 управления. Электромагниты 7 и 8 взаимодействуют с
5 магнитопроводными якорями 11 и 12, соответственно установленными на торцах ротора 1. В плоскости пучности изгибнЫх колебаний ротора 1 установлен дополнительный датчик 13 радиального положения
0 ротора 1. Датчики 4, 5 и 13 радиального положения 4, 5, 13 ротора 1 соединены с входом блока 14 управления изгибными колебаниями ротора 1, являющимся одновременно входом блока 15 расчета изгиба
5 ротора 1. Блок 15 входит в состав блока 14, Блок 14 также содержит блок 16 управления токами ЭМ1,.ЭМ2 7 и 8, входом соединенный с выходом, блока 15. Выход блока 16 является одновременно выходом блока 14
0 управления изгибными колебаниями ротора 1. Выход блока 14 подключен к двум входам блока 10 управления аксиальной опорой. На фиг. 2 представлена кинематическая схема ротора 1 при его механических колебаниях,
5 в том числе и изгибных.
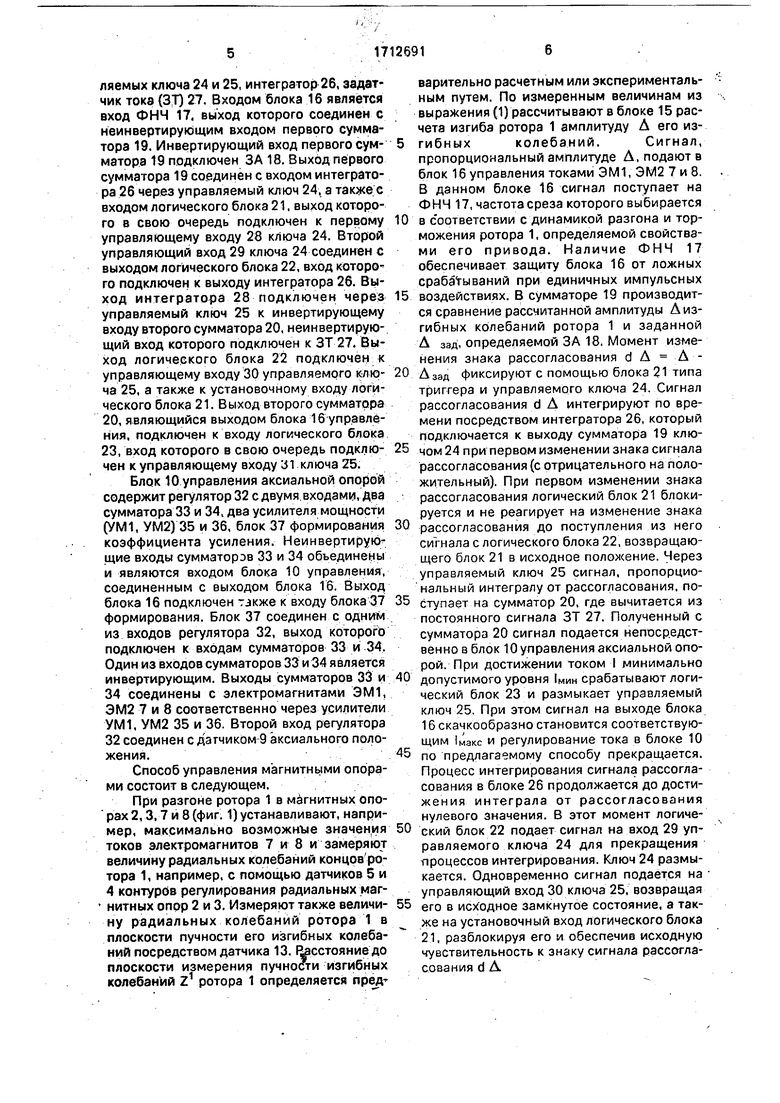
Блок 16 управления (фиг. 3) содержит фильтр нижних частот (ФНЧ) 17, задатчик амплитуды (ЗА) 18 изгибных колебаний ротора 1, сумматоры 19 и 20, три логических блока 21, 22 и 23 типа триггера, два управляемых ключа 24 и 25, интегратор 26, задатчик тока (ЭТО 27. Входом блока 16 является вход ФНЧ 17, выход которого соединен с неинвертиру1С щим входом первого сумматора 19. Инвертирующий вход первого сумматора 19 подключен ЗА 18. Выход первого сумматора 19 соединен с входом интегратора 26 через управляемый ключ 24, а также с входом логического блока 21, выход которого в свою очередь подключен к первому управляющему входу 28 ключа 24. Второй управляющий вход 29 ключа 24 соединен с выходом логического блока 22, вход которого подключен к выходу интегратора 26. Выход интегратора 28 подключен через управляемый ключ 25 к инвертирующему входу второго сумматора 20, неинвертирующий вход которого подключен к ЗТ 27. Выход логического блока 22 подключен к управляющему входу 30 управляемого клкзча 25, а также к установочному входу логического блока 21. Выход второго сумматора 20, являющийся выходом блока 16 управления, подключен к входу логического блока 23, вход которого в свою очередь подключен к управляющему входу У1 ключа 25.
Блок 10 управления аксиальной опорой содержит регулятор 32 с двумя входами, Два сумматора 33 и 34 два усилителя мощности СУМ1, УМ2)35 и 36, блок 37 формирования коэффициента усиления. Неинвертирующие входы сумматоров 33 и 34 объединены и являются входом блока 10 управления, соединенным с выходом блока 16. Выход блока 16 подключен тзкже к входу блока 37 формирования. Блок 37 соединен с одним из входов регулятора 32, выход которогЪ подключен к входам сумматоров 33 и 34. Один из входов сумматоров 33 и 34 является инвертирующим. Выходы сумматоров 33 и 34 соединены с электромагнитами ЭМ1, ЭМ2 7 и 8 соответственно через усилители УМ1, УМ2 35 и 36. Второй вход регулятора 32 соединен с датчиком 9 аксиального положения.
Способ управления магнитнь.1ми опорами состоит в следующем.
При разгоне ротора 1 в мйгнитных опо pax 2, 3,7 и 8 (фиг. 1) устанавливают, например, максимально возможные значения токов электромагнитов 7 и 8 и замеряют величину радиальных колебаний концовротора 1, например, с помощью датчиков 5 и 4 контуров регулирования радиальных магнитных опрр 2 и 3. Измеряют также величину радиальных колебаний ротора 1 в плоскости пучности его и:згибных колебаний посредством датчика 13. Расстояние до плоскости измерения пучности изгибных колебаний Z ротора 1 определяется пред-
варительно расчетным или экспериментальным путем. По измеренным величинам из выражения (1) рассчитывают в блоке 15 расчета изгиба ротора 1 амплитуду Л его изгибныхколебаний.Сигнал,
пропорциональный амплитуде А, подают в блок 16 управления токами ЭМ1, ЭМ2 7 и В. В данном блоке 16 сигнал поступает на ФНЧ 17, частота среза которого выбирается
в соответствии с динамикой разгона и торможения ротора 1, определяемой свойствами его привода. Наличие ФНЧ 17 обеспечивает защиту блока 16 от ложных cpaбatывaний при единичных импульсных
воздействиях. В сумматоре 19 производится сравнение рассчитанной амплитуды А изгибных колебаний ротора 1 и заданной А зад, определяемой ЗА 18. Момент изменения знака рассогласования d А А А зад фиксируют с помощью блока 21 типа триггера и управляемого ключа 24. Сигнал рассогласования d А интегрируют по времени посредством интегратора 26, который подключается к выходу сумматора 19 ключом 24 при первом изменении знака сигнала рассогласования (с отрицательного на положительный). При первом изменении знака
рассогласования логический блок 21 блокируется и не реагирует на изменение знака
рассогласования до поступления из него
сигнала с логического блока 22, возвращающего блок 21 в исходное полох ение. управляемый ключ 25 сигнал, пропорциональный интегралу от рассогласования, поСтупает на сумматор 20, где вычитается из постоянного сигнала ЗТ 27. Полученный с сумматора 20 сигнал подается непосредственно в блок 10 управления аксиальной опорой. При достижении током I минимально
допустимого уровня 1мин срабатывают логический блок 23 и размыкает управляемый ключ 25. При этом сигнал на выходе блока 16 скачкообразно становится соответствующим 1макс и регулирование тока в блоке 10
по предлагаемому способу прекращается. Процесс интегрирования сигнала рассогласования в блоке 26 продолжается до достижения интеграла от рассогласования нулевого значения. В этот момент логичеекий блок 22 подает сигнал на вход 29 управляемого ключа 24 для прекращения лроцессов интегрирования. Ключ 24 размыкается. Одновременно сигнал подаётся на управляющий вход 30 ключа 25, возвращая
его в ис)(одное замкнутое состояние, а также на установочный вход логического блока 21, разблокируя его и обеспечив исходную чувствительность к знаку сигнала рассогласования d А
В блоке 10 управления аксиальной опорой сигнал с выхода блока 16 подается на входы сумматоров 33 и 34, обеспечивая одинаковое и одновременное изменение токов ЭМ1, ЭМ2 7 и 8, а также на вход блока 37 формирования коэффициента усиления, обеспечивая путем обратно пропорционального току I изменения коэффициента усиления регулятора 32 постоянство общего коэффициента усиления контура аксиальной магнитной опоры. Сигналы с-сумматоров 3 и 34 через YM1, УМ2 35 и 36 подаются на электромагниты ЭМ1, ЭМ2 7 и 8.
Сущность происходящих при разгоне и торможении явлений с управлением по предлагаемому способу состоит в следующем.
При разгоне ротора 1 вследствие наличия неуравновешенности от остаточного дебаланса, который не может быть полностью устранен, возникают изгибные колебания ротора 1, частота которых равна частоте вращения. Эти колебания существенно возрастают по амплитуде на частоте вращения, равной собственной (критической) частоте Шоизгибных колебаний ротора 1, поскольку демпфирование таких колебаний за счет внутреннего трения в материале ротора 1 весьма мало. Вследствие этого амплитуда колебаний ротора 1 может достигать значеНИИ, которые недопустимы как с точки зрения требований к функциональным характеристикам используемого привода (центрифуга, шпиндель, турбомашина), так И с точки зрения прочности ротора при изгибных деформациях.
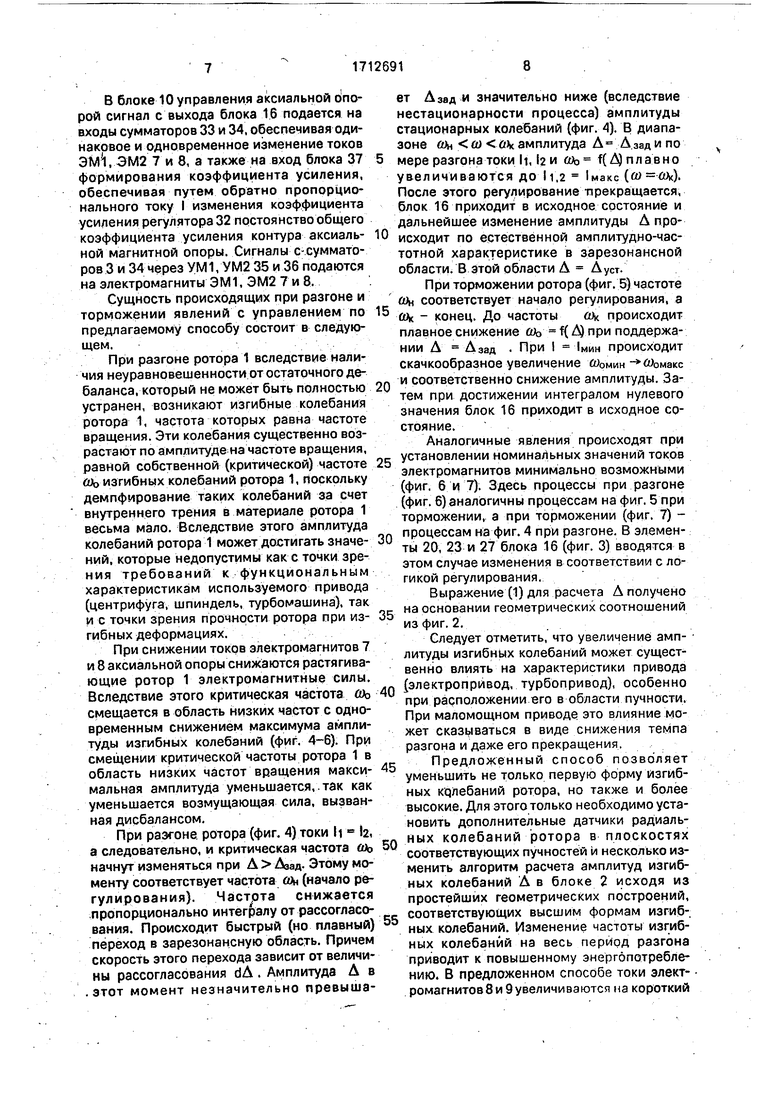
При снижении токов электромагнитов 7 и 8 аксиальной опоры снижаются растягивающие ротор 1 электромагнитные силы. Вследствие этого критическая частота (Оо смещается в область низких частот с одновременным снижением максимума амплитуды изгибных колебаний (фиг. 4-6). При смещении критической частоты ротора 1 в область низких частот вращения максимальная амплитуда уменьшается, так как уменьшается возмущающая сила, вызванная дисбалансом.
При раэгоне ротора (фиг, 4) токи h 12, а следовательно, и критическая частота Oh начнут изменяться при А Дзад, Этому моменту соответствует частота о) (начало регул и рования). HaiCTjoTa снижается пропорционально интегралу от рассогласования. Происходит быстрый (но плавный) переход в зарезонансную область. Причем скорость этого перехода зависит от величины рассогласования dA . Амплитуда А в .этот момент незначительно превышает А зад и значительно ниже (вследствие нестационарности процесса) амплитуды стационарных колебаний (фиг. 4). В диапазоне (Он o)( амплитуда А А.зад и по мере разгона токи li, I и «иь f(/: плавно
увеличиваются до И.2 1макс (W-й)к).
После этого регулирование Т1рекращается, блок 16 приходит в исходное состояние и дальнейшее изменение амплитуды А происходит по естественной амплитудно-частотной характеристике в зарезонансной области, В этой области А Дуст.
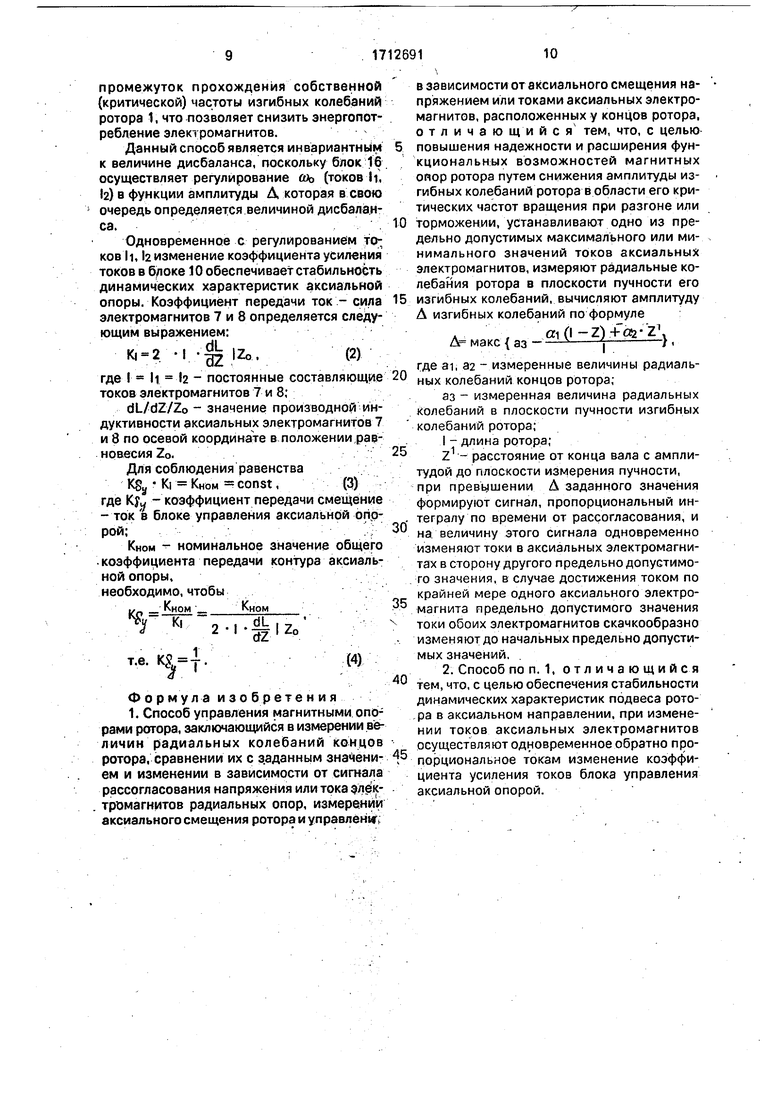
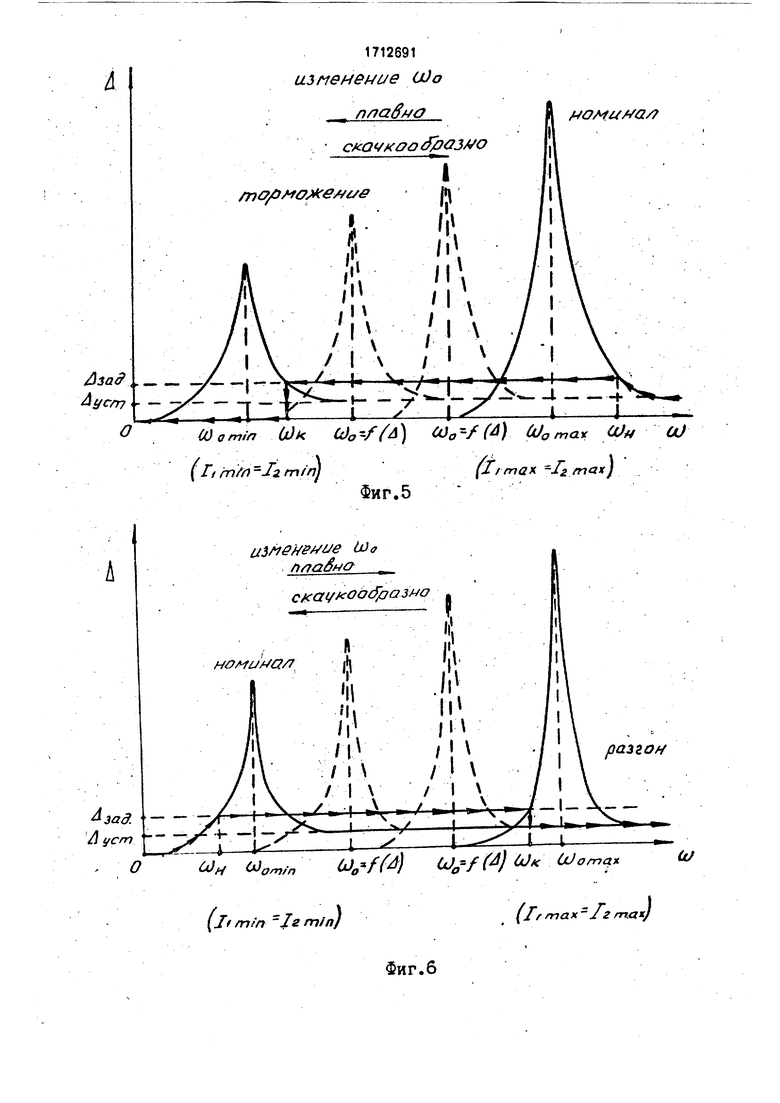
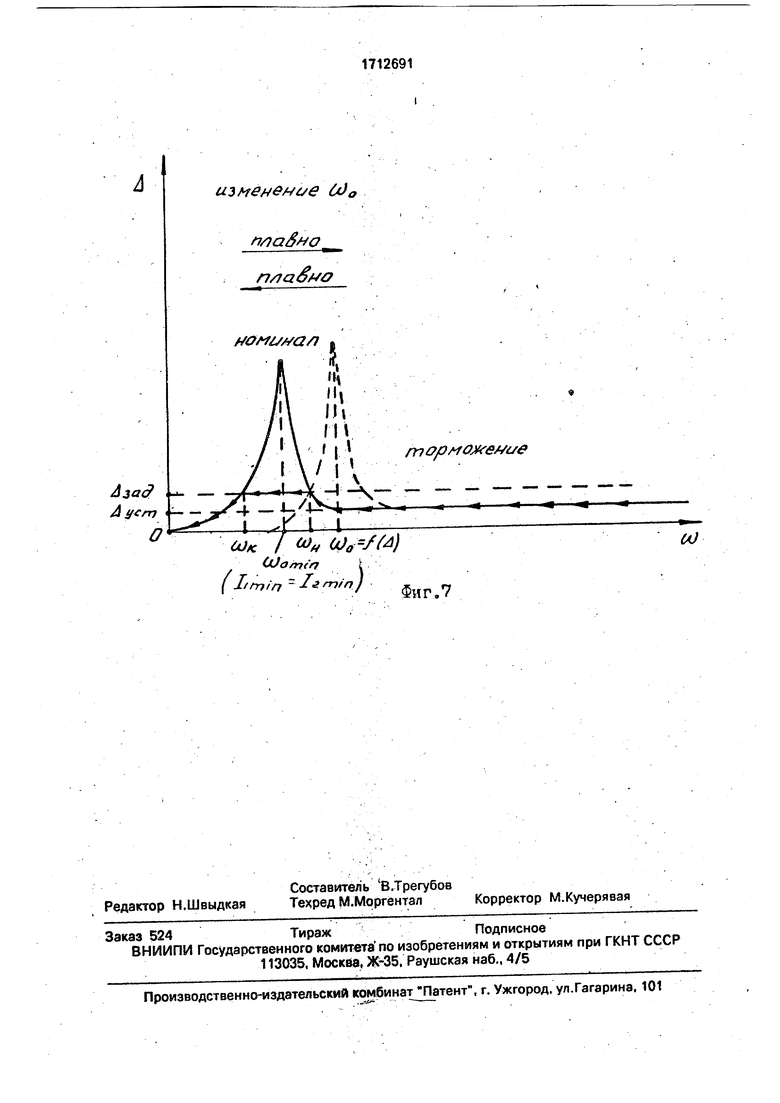
При торможении ротора (фиг. 5) частоте (Он соответствует начало регулирования, а (Of. - конец. До частоты Шк происходит плавное снижение оь f( Д|при поддержании А Азад . При I 1мин происходит скачкообразное увеличение чМомин -(0омакс и соответственно снижение амплитуды. Затем при достижении интегралом нулевого значения блок 16 приходит в исходное состояние.
Аналогичные явления происходят при установлении номинальных значений токов электромагнитов минимально возможными (фиг. 6 и 7), Здесь процессы при разгоне (фиг. 6) аналогичны процессам на фиг. 5 при торможении, а при торможении (фиг. 7) процессам на фиг, 4 при разгоне. В элементы 20, 23 и 27 блока 16 (фиг. 3) вводятся в этом случае изменения в соответствии с логикой регулирования.
Выражение (1) для расчета А получено на основании геометрических соотношений из фиг. 2,
Следует отметить, что увеличение амплитуды изгибных колебаний может существенно влиять на характеристики привода (электропривод, турбопривод), особенно при расположении его в области пучности. При маломощном приводе это влияние может сказываться в виде снижения темпа разгона и даже его прекращения.
Предложенный способ позволяет уменьшить не только первую форму изгибных колебаний ротора, но также и более высокие. Для этого только необходимо установить дополнительные датчики раДиальных колебаний ротора в плоскостях соответствующих пучностей и несколько изменить алгоритм расчета амплитуд изгибных колебаний А в блоке 2 исходя из простейших геометрических построений, соответствующих высшим формам изгиб-, ных колебаний. Изменение частоты изгибных колебаний на весь период разгона приводит к повышенному энергопотреблению. В предложенном способе токи электромагнитов8и9увеличиваются на короткий промежуток прохождения собственной (критической) частоты изгибных колебаний ротора 1, что позволяет снизить энергопотребление электромагнитов. Данный способ является инв;ариантны14 к величине дисбаланса, поскольку блок 16 осуществляет регулирование шь (токов И, 12) в функции амплитуды Д которая в свою очередь определяется величиной дисбалаяса.,; Одновременное с регулированием то:; ков И, 12 изменение коэффициента усиления токов в 10 обеспечивает стабильность динамических характеристик аксиальной опоры. Коэффициент передачи ток - сила электромагнитов 7 и 8 определяется следующим выражением: К| 2 Ч - iZo.(2) где I И 12 - постоянные составляющие токов электромагнитов 7 и 8; dL/dZ/Zo - значение производной индуктивности аксиальных электромагнитов 7 и 8 по осевой координате в положении равновесия Zo.; Для соблюдения равенства К8„ Ki Кном const, где КУу - коэффициент передачи смещение - ток в блоке управления аксиальной oripрой;Кном номинальное значение общего коэффициента передачи контура аксиальной опоры, необходимо, чтобы Формул а изобретения 1. Способ управления магнитными опорами ротора, заключающийся в измерении величин радиальных колебаний концов ротора, сравнении их с заданным знайением и изменении в зависимости от сигнала рассогласования напряжения или тока электромагнитов радиальных опор, измерении аксиального смещения ротора и управлёниг|; в зависимости от аксиального смещения напряжением или токами аксиальных электромагнитов, расположенных у конЦов ротора, отличающийся тем, что, с целью повышения надежности и расширения функциональных возможностей магнитных опор ротора путем снижения амплитуды изгибных колебаний ротора в области его критических частот вращения при разгоне или торможении, устанавливают одно из предельно допустимых максимального или минимального значений токов аксиальных электромагнитов, измеряют радиальные колебания ротора в плоскости пучности его изгибных колебаний, вычисляют амплитуду А изгибных колебаний по формуле «1 (I-Z)+QSZ-Z макс { аз - где 31, S2 - измеренные величины радиальных колебаний концов ротора; аз - измеренная величина радиальных колебаний в плоскости пучности изгибных колебаний ротора; I - длина ротора; Z - расстояние от конца вала с амплитудой до плоскости измерения пучности, при превышении А заданного значения формируют сигнал, пропорциональный интегралу по времени от рассогласования, и на величину этого сигнала одновременно изменяют токи в аксиальных электромагнитах в сторону другого предельно допустимого значения, в случае достижения током по крайней мере одного аксиального электромагнита предельно допустимого значения токи обоих электромагнитов скачкообразно изменяют до начальных предельно допустимых значений, 2. Способ по п. 1, отличающийся тем, что, с целью обеспечения стабильности динамических характеристик подвеса ротора в аксиальном направлении, при изменении токов аксиальных электромагнитов осуществляют одновременное обратно пропорциональное токам изменение коэффициента усиления токов блока управления аксиальной опорой. v U/ л v p
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ пуска электродвигателя цилиндрической конструкции на радиальных упругих опорах | 1986 |
|
SU1337979A1 |
| Способ управления радиальными магнитными опорами ротора | 1988 |
|
SU1613724A1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ ГИБКОГО РОТОРА НА ЭЛЕКТРОМАГНИТНЫХ ПОДШИПНИКАХ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2618001C1 |
| Цифровая система регулирования скорости центробежного аппарата | 1983 |
|
SU1176302A1 |
| Подшипниковый узел (варианты) | 2013 |
|
RU2677435C2 |
| Устройство для управления двигателем и коррекции дрейфа гироскопа | 2021 |
|
RU2789116C1 |
| СПОСОБ ВВЕДЕНИЯ ЛЕКАРСТВЕННЫХ ВЕЩЕСТВ В БИОТКАНЬ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1992 |
|
RU2076746C1 |
| Устройство для стабилизации магнитного подвеса ротора | 1990 |
|
SU1744313A1 |
| Способ управления радиальными активными магнитными подшипниками роторной машины и роторная машина | 1990 |
|
SU1751499A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СТРЕЛКАМИ НА СОРТИРОВОЧНЫХ ГОРКАХ | 1934 |
|
SU43437A1 |
, (,6
i//ipa6/ eHi
/J dlidi G/7Cr/- 6f/ i
ono/ya/ c/ ff/toK fO ) yopaS e c/if Vr)/JGff /nafca/ iJf a c ja/J6ff(7fj Mf зне. jfja/3 y( . I e//7/ja I/( Л. - / у I hФиг Л S /jatc ,(ei.a,a pac ff/пл uy2i/ ffl pamopQ I S/fe . joa/nfy/ya : I I I I
(l, IfФиг.З I
eHue (jJo платно
f-/ofitjf a
(tJ.
) t
(tjK
CJofna
ul
Zi fnaxf
(I I ma% , / - - 2f ,-.- 6/ioKynoa e f I onapo(J p ,/ /O I ., I - 1712691 iniE-л d&-u-A;pf за$,. {/СП7 (tiomin (f) (TIfn/n J 2fn LOff n/jaSt o cf at/ oddfla3 л J7 A t/cfTi // (
(if m/n lernin)
(Tr friax rn.a)
Фиг.б изпене1 ив dJo ( Ct)o/ A COo-/{) CUomaY Ш O) /ni(T/max -ffffnaxf 1712691 , ТГ / Л1 I гЯ Jrt v. x. . .- -. - « / i .-f . Фиг.5 o разгон / J / I (л}о-/(}(,(
| Бетин В | |||
| Н | |||
| и Айзеншток Г | |||
| И | |||
| Динамика радиального движения шпинделя на маг^ 'нитных опорах | |||
| - "Станки и инструмент", 1988, №5 | |||
| с | |||
| Прибор для промывания газов | 1922 |
|
SU20A1 |
