Изобретение относится к области устройств автоматики и может быть использовано в механизмах, требующих дискретного позиционирования.
Цель изобретения - упрощение конструкции и повыщение надежности.
На чертеже представлена принципиальная схема привода.
Гидравлический цифровый привод содержит цилиндр 1, последовательно расположенные в не.м поршни и щток 5 с образование.м рабочих 6-8 и возвратной 9 полостей, демпфирующее устройство, включающее дешифратор 10 и датчик положения, выполненный в виде жестко связанного со щтоком 5 плоского золотника 11, установленного в корпусе 12, который соединен с цилиндром 1 с образованием камеры 13. В корпусе 12 выполнены окна 14-21, подключенные к соответствующим входным каналам 22-29 дещифратора 10.
Распределители 30-32 выходными линиями 33-38 связаны с рабочими полостями 6-8 и с управляющими каналами 39- 41 золотников 42-44 дещифратора 10, а выходной канал 45 последнего подключен к сливу рабочей жидкости. Возвратная полость 9 подключена к источнику 46 питания через обратный клапан 47, а через подпорный клапан 48 и окно 49 - к камере 13. Обратные клапаны 50-52 установлены в линии 53 связи камеры 13 с выходными линиями 54-56 распределителей 30--32. Источник 57 питания, подключенный к распределителям 30-32, рассчитан на более высокое, чем источник 46, давление.
Привод работает следующим образом.
В исходном положении рабочая жидкость от источника 46 поступает в возвратную полость 9. При этом порщни 2-4 занимают левое (по чертежу) положение. Золотники 42 - 44 дещифратора 10 находятся в исходном положении, соединяют каналы 22 и 45. следовательно, окно 14 сообщено со сливом. Подпорный клапан 48 закрыт, так как он настраивается на давление большее, чем давление питания источника 46.
При переключении, например, распределителя 30 рабочая жидкость поступает в полость 6 цилиндра 1 и одновременно в канал 39 дещифратора 10. Золотник 42 перемещается вправо (по чертежу), сообщая канал 23 и, следовательно, окно 15 с выходным каналом 45. Под действием давления в полости 6 порщень 2, а вместе с ним и UJTOK 5 перемещаются на величину S. Жидкость из полости 8 вытесняется через подпорный клапан 48 в камеру 13 и далее через окно 15, каналы 23 и 45 на слив. При подходе щто- ка 5 к заданной координате величиной S золотник 11 перекрывает окно 15, дросселируя поток жидкости, поступающей из возвратной полости 9 на слив, чем обеспечивается плавное торможение щтока 5.
0
При отключении управляющего сигнала о распределителя 30 управляющий канал 39 сообщается со сливом и золотник 42 занимает исходное положение.
Под действием давления питания, постоянно поданного в полость 9, щток 5, а вместе с ним золотник 11 и порщни 2-4 перемещаются влево (по чертежу). Рабочая жидкость из полости 6 через распределитель 30, обратный клапан 50 по линии 53, камеру 13, окно 14, каналы 22 и 45 поступает на слив. При подходе щтока 5 к исходному положению золотник 11 перекрывает окно 14, дросселируя поток рабочей жидкости, поступающей из полости 6 на слив.
5
Переключением, например, распределителей 30 и 31 достигается перемещение щтока 5 на величину 35. Рабочая жидкость, поступая на управляющие каналы 39 и 40, перемещает золотники 42 и 43, устанавливая
0 их в положение, при котором камера 13 сообщается со сливом через окно 17 и каналы 25 и 45 дещифратора 10. При подходе щтока 5 к заданной координате золотник 11 перекрывает окно 17, вследствие
5 чего происходит плавное торможение порщ- ней 2 и 3 и щтока 5.
При снятии управляющих сигналов с распределителей 30 и 31 каналы 39 и 40 сообщаются со сливом, а кана.ч 22 - с каналом 45. Рабочие полости 6 и 7 через рас0 |ределите;1и 30 и 31, обратные клапаны 50 и 51, линию 53 сообщаются с камерой 13 и далее через окно 14 и каналы 22 и 45 со сливом. Далее привод работает аналогичным образом.
Таким образо.м, цифровой привод прост в
5 конструктивном испол11ении и надежен в работе. В сочетании с предлагаемой конструкцией демпфирующего устройства позволяет получить повышенное быстродействие при заданном законе тор.можения.
40
Формула изобретения
Гидравлический цифровой привод, содержащий цилиндр, последовательно расположенные в нем с образованием рабочих и
возвратной полостей порщни и шток, демпфирующее устройство, включающее дешифратор с входными, управляющими и выходным каналами и датчик положения, выполненный в виде жестко связанного со щтоком плоского золотника, установленного в
корпусе с возможностью перекрытия его окон, каждое из которых подключено к одному из входных каналов дешифратора, и распределители, подключенные выходными ,1иниями к рабочим полостям и управляющим каналам дешифратора, при этом
возвратная полость подключена к источнику питания, отличающийся тем, что, с целью упрощения конструкции и повышения надежности, привод снабжен обратными
21339314
и подпорным клапанами, корпус датчика по-ратные клапаны, при этом возвратная положения жестко связан с цилиндром с об-лость сообщена с камерой и источником lui- разованием камеры, которая сообщена с вы-тания соответственно через подпорный и обходными линиями распределителей через об-ратный клапаны.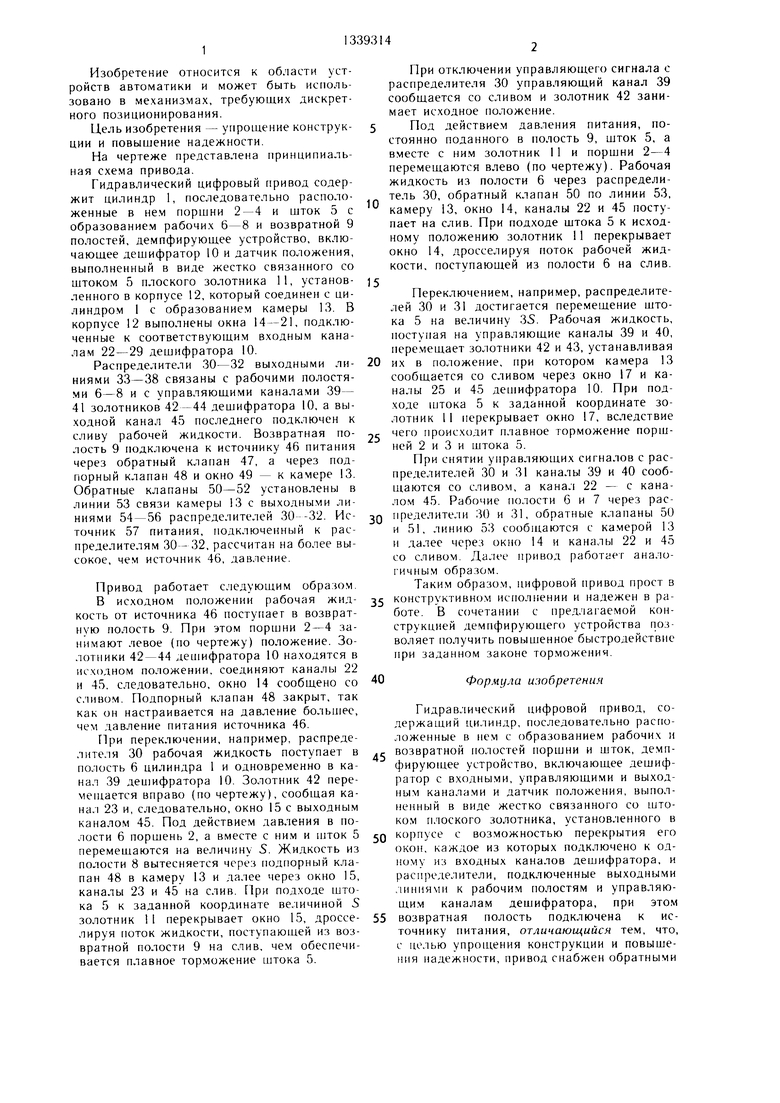
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический привод | 1981 |
|
SU1059286A1 |
| Пневмогидравлический цифровой привод | 1986 |
|
SU1418513A1 |
| Пневмогидравлический цифровой привод | 1980 |
|
SU943445A1 |
| Гидропривод для возвратно-поступательного перемещения рабочего органа | 1982 |
|
SU1106926A1 |
| Регулируемый гидропривод | 1982 |
|
SU1064056A1 |
| Свободнопоршневой двигатель внутреннего сгорания с гидравлическим приводом | 1979 |
|
SU878968A1 |
| Гидропривод машины для фрезерования покрытий | 1980 |
|
SU909362A1 |
| Силовой цилиндр | 1982 |
|
SU1110949A1 |
| ГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1970 |
|
SU268855A1 |
| Преобразователь давления | 1986 |
|
SU1497394A1 |
Изобретение может быт1. исиоль.чова- но в ме.ханизмах с дискретным 1юзии.и(ни- |и)вание 1. Цель изобретения упрощение конструкции и иовьииеиие надежности. Кор- нус 12 датчика но. южения жестко связан с ци, индром 1 с образованием камеры 13. которая сообщена с вы.ходными линиями раснределите.чей через обратные K.iaiianiii. Возвратная полость 9 сооби1ена с камерой 13 через подпорный клапан 48, а с источником питания 46через обратньп к.ча- пан 47. Привод обеспечивает плавное торможение 1птока 5 благодаря том. что тормозное усилие создается не то.-|ьк() увеличением давления в камере дсмпфируюшег и ни.1ипдра, но и уве.тичением дав.чеиия в управ.чяющих и во.вратных камера.х. KfioMe того, привод позволяет повысить быс1родсй- ствие нри задаином законе торможс1П(Я, 1 ii.i. iS ч7 (Л со со CD СО 5/ 52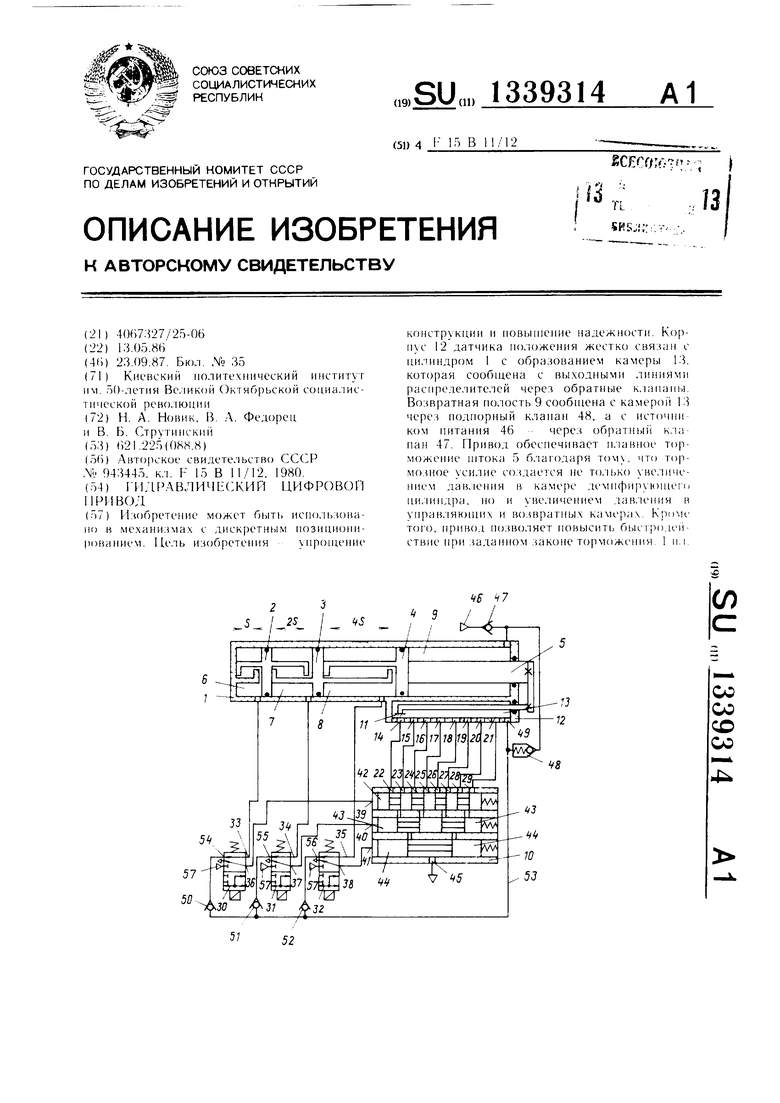

| XHTOiK-Koe свидетельство СССР , 943445 | |||
| кл | |||
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
